�J������(27)
�g�b�v�֖߂�
�J�������C���f�b�N�X��
�O�̃y�[�W��
���X���S����
�v���Ԃ�̓����̍X�V�ɂȂ��Ă��܂��܂����B
���T�͏o������������A���݉��������A�Z����������œ������X�V����G�l���M�[������܂���ł����B�@���{�b�g�J���́A���㌟�������������̂ōX�V���e���Ȃ��������Ă̂�����܂����B�B�B
�����l�q�����Ă���ƁA�ǂ����s����A�A�Ƃ���������̐����ɕ����Ă��銴���B�@���グ���삪�悭�Ȃ��̂��낤�Ƃ����z��ŁA���グ�J�[�u�̊���ύX���Ă݂܂����B
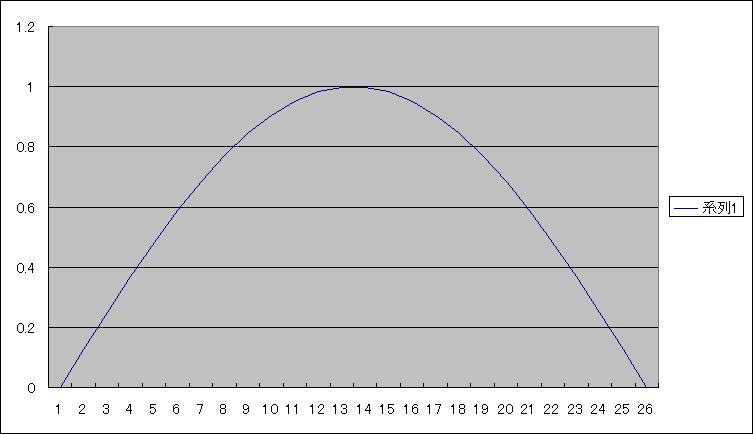
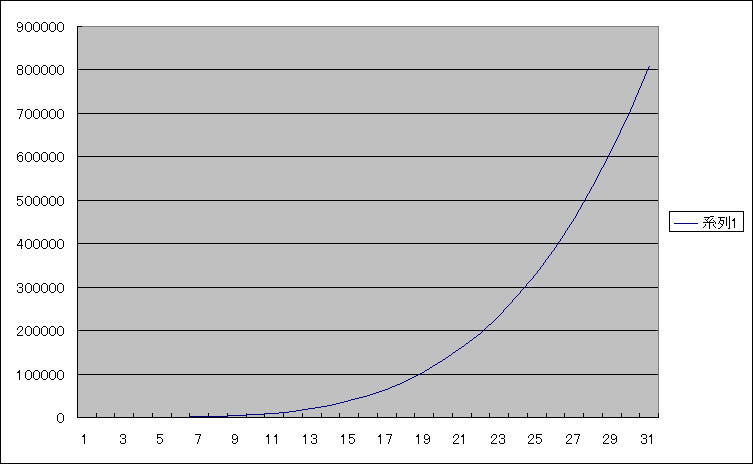
���܂܂ł͂����̃T�C���J�[�u�B
�Ȃ̂ŁA�����グ�n�߂镔���́A�ǂ���I�Ǝ����グ�āA���낷�Ƃ��̓h�X���I���낷�킯�ł��B�@����Ⴂ���킯����܂���B�@�����ŁA�A�A
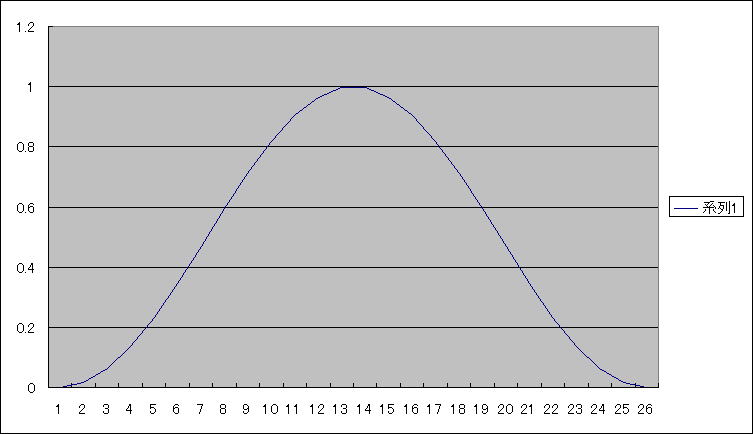
���x�͂�����ƍH�v���āA(1-cos( ) ) / 2 �ł��B���ꂾ�ƁA���Ƃ��Ă͏グ��Ƃ��͉����x0����X�^�[�g���܂��B
�ߎ��Ɋ|���镉�ׂ��ׂĂ݂�ƁA�܂��A�T�C���J�[�u
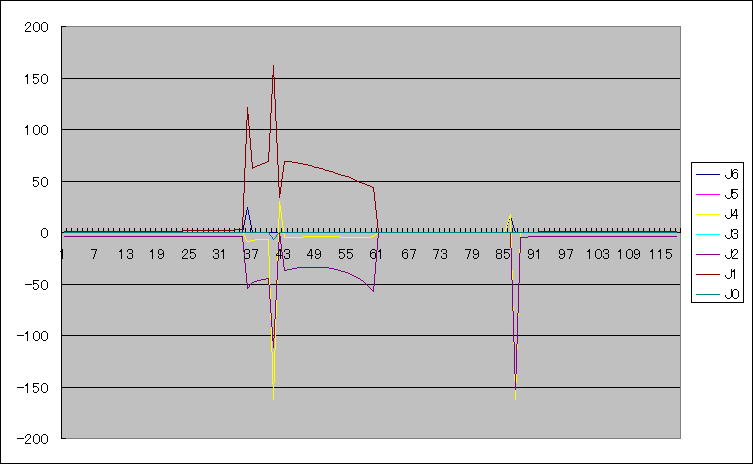
���ɉ��ǔ�
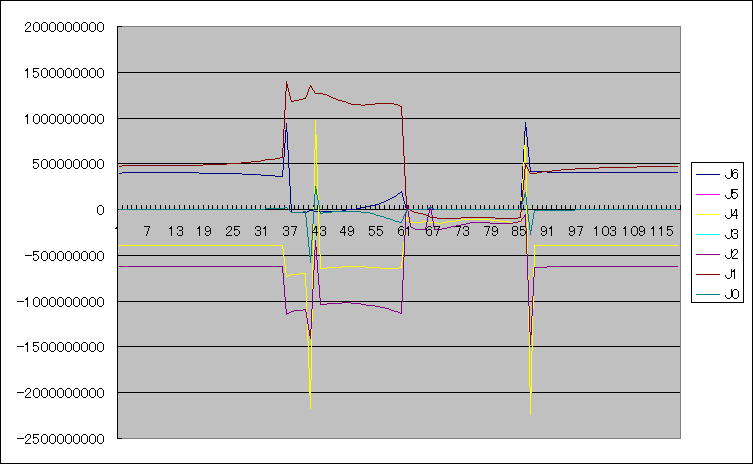
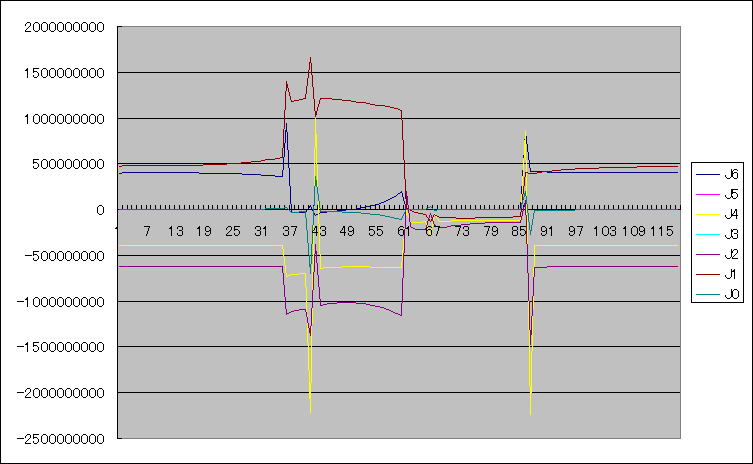
J1�ŁA�����グ��^�C�~���O�ŏo�Ă���m�C�Y�͌y�����Ă��܂��ˁB���̑��͈ӊO�ƕω��Ȃ��B�@�����ƌ����ɍ����o��Ǝv�����̂����B
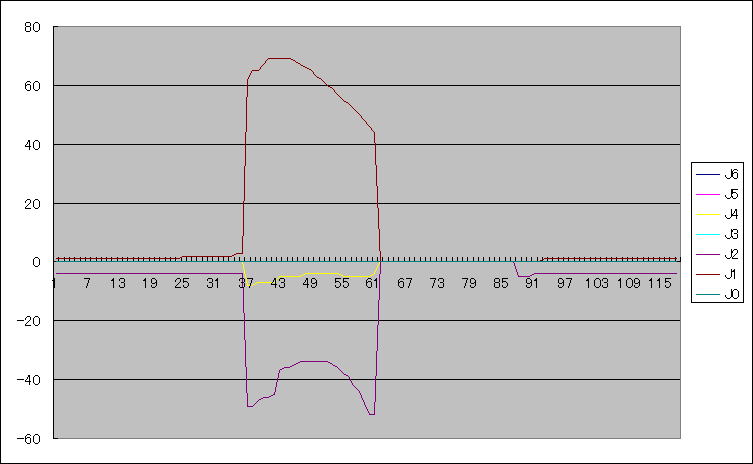
�ŁA���̉��ǔłŕ������Ă݂�ƁA�Ȃ��Ȃ����������ŐÂ��ɑ����グ��̂ł����A�A�@2���ڂŔ��Α��ɐ������ł��܂��܂��B��͂�n�ʋ߂��̎��_�̃L�����Z�����g�ݍ��܂˂Ȃ�Ȃ����B�@���܂��肽���Ȃ����ǂȂ��B
���X���T����
�\�肵�Ă�����������́A4�������炢�x��Ă��܂��܂������A��ăo�b�e���[�[�d���s���܂����B�@�ӊO�ƕ��d���Ă��Ȃ��ċ�������B

�A�C�{�̓���m�F�����Ă݂�ƁA�߂��r�N�r�N�z�����܂���B�|�e���V�����[�^�̃u���V�����H���Ă��邩�_�������ł��Ă��܂������B�O���O���Ƒ��̊߂����Ă��Ɗ����̓}�V�ɂȂ�܂����B�@����Ȃ��Ǝv���đ��̃A�C�{���`�F�b�N���܂������A�P��ȊO�͑��v�ł����BERS-7����̍��E����������ƃm�C�W�[�ɂȂ��Ă��܂��Ă����B���ނށB

���̐�A�A�C�{�Ń��{�b�g�J�������鎞�͂��Ȃ��悤�ȋC�����邯�ǁA�ꉞ�͕ۑ��̕����ŁB�B�B
�����̉摜��DSi�̃J�����ŎB�������ǁA��f���Ⴂ���A�������A�p�\�R���ʼn��H���悤�Ƃ�����t�@�C���ł��Ȃ��Ȃ�����A�A�g���˂��ȁB
�@
���āA�A�A�ڒn�_�߂��̎��_�̃L�����Z�������O�ɕ��ו�����܂��傤�B
������x�ȏ�̕��ׂ��|����ƕ��������悤�ɂ������̂����ǁA���E�t�߂ł̓���������ꍇ�A�s�A���_���ł��Ă��܂��Ƃ���Ȃ̂ŁA����|�C���g����}���ɗ����オ�����K�p���悤�Ǝv���܂��B�@������18�ӂ肩��̓��j�A�ɕ��������C���[�W�B
�����̊��Ŋߕ��גl�����l���v�Z���Ă݂�B
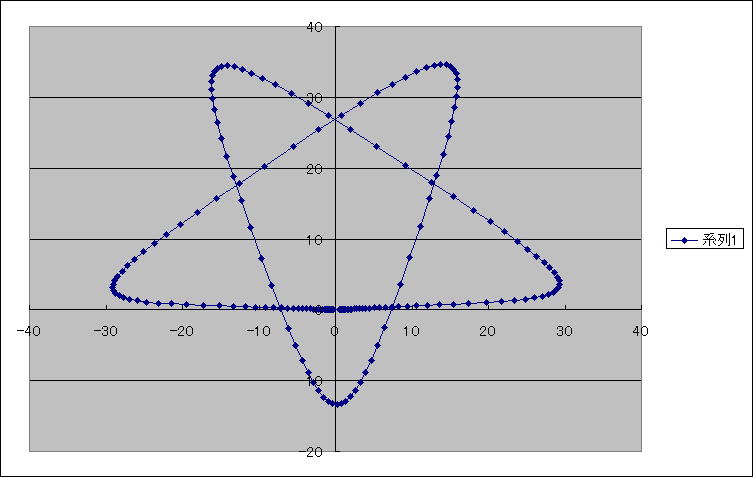
�X�p�C�N�����̂܂ܕ�l�ɂȂ��Ă��܂��Ă���̂͂���Ȃ̂Ńt�B���^�[�������ăX�p�C�N�����܂��B�@������Ȋ����B
���̕�l���v�Z���Ċi�[����̈����邽�߂ɐV����short[14]�̔z��������o�[�Ɏ����X�g��������Ƃ���APC��ł̃e�X�g�v���O������DUMP���Ă��܂��B�G���[�̔������ׂ��float[3]�̃��X�g���N���A����Ƃ���ŏo�Ă���B�ӂނ������`�Ə����Y���ʁA�V������������X�g�̃m�[�h�̃T�C�Y��36byte�ł��邱�Ƃ���肩���m��Ȃ��ƌ��������āA�m�[�h�T�C�Y��16�̔{���ł���48byte�ɂ���ƃG���[�����܂����B�@�����SEMB��ł̓m�[�h�T�C�Y������Ă���̂Œ������˂Ȃ�Ȃ��̂��A���Ȃ������̂��B�@�v���b�g�t�H�[���̈Ⴄ���Ńf�o�b�O����ƂȂ��Ȃ��F��Ȗ�肪�o�����ł��ˁB
�@
���T�͑���c�ŗ��K��B�@�ė��T�̘A�x�͐M������ō��h�B�@�����Ă��̎��̏T�Ƃ��������h�̏T�������{�����Ƒ����Ă�B�@�ŋߕ����ɐi���Ȃ�����A���̕����ƂX���̐i���͂���ڂ��Ȃ��Ă��܂������ł��B(^_^;)�@���h�y���݁I
���X���U����
���̕��גl����̕�l�Z�o������SEMB���ɈڐA�����̂����A�܂������̔���Ȃ�exception�������B�@�����C���ɂȂ��Ă����B(>_<)
���גl�̕ϐ����Q�Ƃ��Ă����Ȃ��̂����A��l���v�Z���邽�߂ɕ�l�v�Z�p���Ɉ����Ƃ��ĎQ�Ƃ���Ƃ�exception�ɂȂ�B�@�X�ɂ͊����ŎQ�Ƃ��Ȃ���Ζ��͔������Ȃ��B�@�킩���Ȃ��`�B
�Ƃ肠�����A��������Ȃ��Ă��̏ゾ�Ƒ����Ђ�����Ȃ���ł͂��邪�����̂ŁA���̏�ԂŃR���g���[���ő��c�ł���悤�ɂ��悤�Ƃ����̂����A�A�A���Ȃ��ʐM�ł��Ă���CSI���s���B�@�œK���̂��߂��Ƃ��v������������Ⴄ�炵���B�@�ʐM�͏o���Ă���炵���A2��Ɉ��̊����ł͂���炵���f�[�^���͂��̂����A�f�[�^���т��Ⴄ�̂łȂɂ����炨�������炵���B
�@
����̃v���O�����͂ǂ����OS�Ȃ��œ��������̂���Ȃ��̂�������Ȃ��Ȃ��Ǝv���n�߂܂����B�@�v�Z�ʂ��������A���l���Z���肾���A�p�����[�^�ɂ���Ďg�p�f�[�^�����ω�����̂ŒP���Ȕz��ɂ����Ƀ��X�g�\���ɂ����肵�āAOS�Ȃ��ŊJ������ɂ͂�����Ɠ�������̂��B�B�i����Ȃɓ�����Ƃ��Ă�Ƃ͎v���Ȃ����B�B�j�@���X�g�Ń������[�m�ۂ�����J�������肵�Ă���̂Ƀ������[�Ǘ�������ĂȂ��킯������A���A���A���Ȃ̂͏��m�̏�Ȃ�ł����ǂˁB(^_^;)
CSI�����܂��s���Ȃ��͍̂������ȁB
���X���X����
�����͉^�]�Ƌ��̍X�V�̂��߂ɋx�ɂ��Ƃ�܂����B�@���v���Ԃ͌ߑO���x�ŊԂɍ����̂�����ǁA�S�R�x�ɂ��Ƃ��Ă��Ȃ��̂őS���x�ɂɁB
�ߌ�͂̂�т蒋�Q������A�����Ƀ��b�N��ݒu������i��ς������I�I�j���Ă���܂����B
�@
CSI�ʐM�����������̂ŃI�V���Ŕg�`�m�F�B
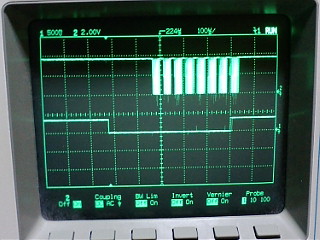
�ʂ��I�@8�o�C�g�ڂ̃N���b�N����������O��CS�������オ���Ă��܂��Ă���B�@����͂��������B
8�o�C�g��M�������s������ɂ��Z���E�F�C�g����ꂽ�琳������M�ł���悤�ɂȂ�܂����B�@�ł��A���������Ȃ��A�V�O�}�͂��̃v���O�����ŒʐM�ł��Ă����̂ɁB�B�@�m���ɃV�O�}�̊J���̎��ɂ̓I�V���Ŋm�F���Ă��Ȃ��������炨�����������̂����m��Ȃ�����ǁB�B
���C����̃I�V����ʂ��B�e�������肾�����̂����A�ۑ����Ă��Ȃ������炵���B�@�I�V���Еt����������̂ʼn摜�Ȃ��B
�Ƃɂ����A�R���g���[���Ƃ̒ʐM�����܂��������̂ŃR���g���[���ő���ł���悤�ɂ��Ă݂܂��傤�B
���X���P�O����
�R���g���[���ő���ł���悤�ɂȂ����̂����ǁA��͂�̏�ł��葫�ł��������Ȃ��B�@�Ȃ̂ŁA�u������ɂ��Ă����l�v�Z�ł̂킯�̔���Ȃ�exception�ɍĒ���B
PC��ł͖��Ȃ������Ă���悤�Ȃ̂ŏ\������̓������A���P�[�V�����̖�肾�Ǝv���ĐF�X�`�F�b�N���邪���͌�����Ȃ��B�@�F�X�������Ƃ���Adouble�Ōv�Z�������ʂ�short�ɕϊ����Ċm�ۂ����������[�̈�Ɋi�[����Ƃ��������Ȃ�B�@���ڐ��l����������Ashort�̕ϐ�����Ēl�������Ă����Ȃ��B�@�����A�A�킩���B
���ǂ͓��������ǁAshort�ŏ\���̕ϐ���double�Ŋi�[���邱�Ƃɂ����B�@���X�g�̃m�[�h�T�C�Y���Adouble�̏ꍇ��128byte�Ashort�Ȃ�48byte�i�{����40byte�����A16�̔{���ɂȂ�悤�ɒ��������j�@���W���i�[����̂Ɏg���Ă���O������double�̃m�[�h��32byte�Ŗ�肪�Ȃ��̂ŁAshort�̃m�[�h��32�̔{����64byte�ɂ�������悤�ȋC������B�@�Ǝv���Ď����Ă݂����_���ł����Borz�B�B�B�@�����̂Ƃ����double�̃��X�g�œ����̂����Ĉ��S���ĐQ���ɓ��邱�Ƃɂ��悤�B
 �@�摜���Ȃ��Ƃ��т����̂Ŏ�Ȃ������_�B�@�z�����ꂢ�ɂ��Ȃ���Ȃ��B
�@�摜���Ȃ��Ƃ��т����̂Ŏ�Ȃ������_�B�@�z�����ꂢ�ɂ��Ȃ���Ȃ��B
���X���P�Q����
�����̓��{�b�g���K��B�@����c��w�ł̗��K��J�ÂȂ̂ł����A������J�łǂ��ɂ������オ��Ȃ��B�@�H�t���ŕ��i�w���̗\�肪�������̂����ǁA���i����������������Ɠ��ʕK�v�ȕ��i�͊m�ۂł��܂����B�@�Ȃ̂ŁA�J���~�ނ̂�҂��Ă݂���B
���Ȃ��J�͏��~��ɂȂ����̂ő���c�Ɍ����ďo�������̂ł����A�T�[�{�P�[�u�����݂��Ƃ��Ȃ����Ȃ܂܂Ȃ̂͂��₾�����̂�100�~�V���b�v�ő����o���h���Ă������Ƃɂ��܂����B�@�ł��A�w�O��CanDo�ɂ͗~�����T�C�Y�̃o���h���u���ĂȂ��B�@����ɁA�����ďo��̂�Y�ꂽ�e�[�u���^�b�v�i�̑���̎O���v���O�Ɖ����P�[�u���j�ƁA�����Ƀ��o�[�V�[�g��\��H��̂��߂̃J�b�^�[�i�C�t���w���B�@�Y�ꕨ�̂��߂̏o��400�~�ł��B
���K��ŁA�Ȃ�Ƃ���������e�X�g�����悤�ƁA�����R���g���[���ő���ł���悤�ɂ����̂�����ǁA�܂��g�����������Ă��Ȃ��l�q�B���������ʂɃt�B�b�g���܂���B
����ł��A�Ƃł�MDF�{�[�h�̏�ł͂��葫�ŕ����Ă����̂����ǁA�싅�̃��o�[�V�[�g��\�����Ƃ���A�Ȃ��Ȃ��̃O���b�v�����Ă����ς�����Ȃ��Ȃ��Ă��܂��܂����B�@�X�ɂ̓R���\�[���P�[�u���O���Ẵe�X�g�������̂ł����Aexception���N�����Ă�l�q�B�@�Ȃ��ȁ[�B
�g�����̍Ē��������悤�Ǝv���āA�܂��A��ԃg�������������ȍ����̃T�[�{�̃g�������������Ă����Ƃ���A�T�[�{���\���I�@�~�܂�Ȃ��Ȃ��Ă��܂��܂����B�@�|�e���V������ꂽ�̂��Ǝv�������A�p�x�͂����Ǝ��Ă���l�q�B�@ICS�ʐM������ɏo���邵�A�Ȃs�R�������Ă��܂����̂��H�H
�@
�ǂ��l���Ă����Ă��܂��悤�ȏ���Ȃ����A�������Ă݂��Ƃ�����A��肾���Ǝ~�܂�Ȃ����ƈȊO�͓����Đ���B�@����ς�Ȃɂ��̐ݒ�̂������ƍl����ROM�f�[�^���p�����[�^���ɂ��ׂĂ����킹�Ă݂�ƁA�p�x�̉����l�����̂������傫�Ȓl�ɂȂ��Ă��܂��Ă���B�@���ꂾ�[�[�[�I
�Ȃ��������Ȃ����̂��͂킩��Ȃ����A�g�����l���������̍ۂɊp�x�̉����l������������ď���l�����傫���Ȃ��Ă��܂������߂ɂ������ȓ���ɂȂ��Ă��܂����炵���B�����l�𐳏�ɒ�������A����܂����B�@(^�B^)�@�悩�����[�B
�l�`��������ɃT�[�{�����ė��Ă����Ȃ��ď�����܂����B�@�i���������ĂĂ��\���ɂȂ邩�炢�����ǁj
������Xbee�Ŗ����ŃR���\�[�����Ȃ���悤�ɂ���\��B
���X���P�R����
�g�����ɂ����E�����邾�낤�Ǝv���A����̃��[�����ɃX�g���b�`�ݒ�������āA�Ȃ炢���䂶��Ȃ����ǁA�H�ʂɂȂ���Ė�������悤�ɂ����������P���Ȃ����ȁA�Ƃ������ƂŃT�[�{�ɃX�g���b�`�ݒ������v���O�����������B�i���܂܂ŏ����ĂȂ������̂��j
���̂悤�ɗ\���啝�ɒ����Ċ������Ă��������X�g���b�`�ݒ�ő�����_�炩�����ĕ������Ă݂邱�ƂɁB
�f�t�H���g�̐ݒ肪60�ŁA�J�`�J�`��ԁAPWM�R���g���[���̏ꍇ�̓X�g���b�`�P�C�Q�C�R�ƂR��ނ̃v���Z�b�g�l���p�ӂ���Ă���̂����AICS�̏ꍇ�͂Q����Q�T�S�̐��l��ݒ肷�邱�Ƃ��o����B�@���Ȃ݂ɃX�g���b�`�P���U�O�@�X�g���b�`�Q���R�O�@�X�g���b�`�R���P�T�@�Ƃ����l�ɂȂ��Ă���B
�Œ�̂Q�ɐݒ肵�Ă݂�ƁA�w���p�x��ێ��ł��Ȃ����炢�Ƀ��������B�@���̊���ɂW���炢�Ō��\���������ŕێ��͂��o�Ă���B
���߂��ɂ��́u�W�v�ŕ������Ă݂�ƁA�ǂ����_�炩�����ŕ����Ȃ��B�@�����X�g���b�`�͂����ς�g���Ȃ����H�Ǝv�������Ƃ肠�����R�O���炢�ɐݒ肵���畁�ʂɕ����Ă���B
�R�O���ƂȂ炢����ۂ��Ȃ邩�ǂ����������Ȍł��Ȃ̂ňӖ��͖�����������Ȃ��B
���̊߂��ēx�������Ă݂�B�@�����������肾�������ӊO�Ƃ���Ă���B�������Ă��邤���ɂ����̂��H�@�I�[�g�g�����@�\���~�����Ƃ��낾�ȁ[�B
�ēx�g������������Ƃ���A�䂪�Ƃ�MDF�{�[�h�ゾ�Ƃ��葫�ł��邪�܂�������B�@����c�̉��݃����O�͂Ђ��������Ă��܂��ă_���������̂��A���������Ă��Ȃ������̂��B
���f�W�J���ŎB����YOUTUBE�ɃA�b�v�B�@���[�r�[���[�J�[����MOV�t�@�C���͕ҏW�ł��Ȃ���ł��ˁB�ҏW�������Ȃ��B
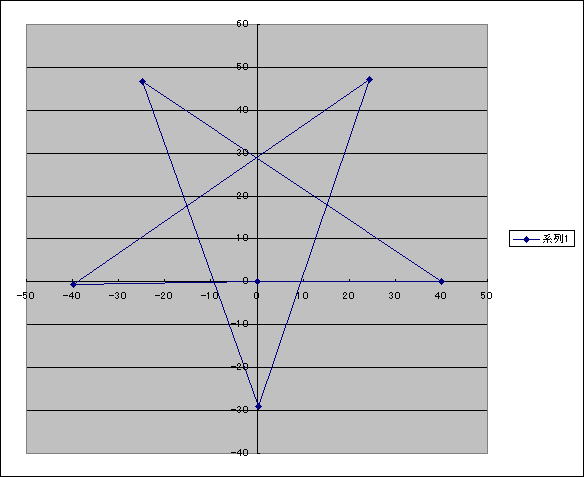
�g���������Ă��������ɂȂ��Ă������炻�낻�����|���Ă݂悤�ƁA��l����m�C�Y���������镔�����v���O��������B�@����̃O���t�̓G�N�Z����ł̌v�Z�������̂ł܂��R�[�f�B���O���Ă��Ȃ������̂ł��B
�Ƃ��낪�A���p�����[�V�����̂Q��ڂŁA���l�ɕ�l���v�Z����ƁA�Ɓ[��ł��Ȃ��f�J�C�X�p�C�N���o�Ă��܂��A�m�C�Y���_�N�V�������Ə����ł��Ȃ��B��������̂܂ܕ�l�Ƃ��ēK�p����Ƃ܂Ƃ��ɓ����Ȃ��͂��Ȃ̂ŁA���̃f�J�C�X�p�[�N��r�������i���l���˂B
�f�J�C���Ă̂́A�ő�ł�0.1radian�ʂōl���Ă����l�A���ۂɌv�Z���Ă݂�Ƒ傫���Ă�0.05radian�ʂŔ[�܂�Ƃ��낪�A�X�p�C�N����Z�o������l��148radian���炢�B�@���邮�������Ⴄ�B(>_<)
���X���P�S����
�ł����X�p�C�N�̌����́A�p�����[�V��������鎞�ɉ����x�v�Z���s�����߂ɍ��p���t���[�������ł����B�@�ł��A�o�O���̂͒��i���s���̖ڕWZMP���������ɂ���܂����B�J�[�u���s�ł͔������Ȃ��o�O�������悤�ł��B
��l���܂Ƃ��Ȓl�ɂ܂Ƃ܂����̂ŁA����ƕ�������ĕ������邱�Ƃ��o���܂��B�@����ł����ς�����Ȃ�������V���b�N���ȁ[�B(^_^;)
���X���P�T����
���T�̍��h�p�Ƀh���L�ŐQ�܂��Ă��܂����B�X�V�O�~�B�@������قǔ����Ƃ��A�����j���Ƃ�����Ȃ����낤�Ȃ��B(^_^;)�@���h�̎Q���\�������o�[����ƂȂ��A���{�b�g�������Ƃ����{�b�g�H�[�̊�荇����݂����ɂȂ��Ă܂��ˁB�@���{�b�g�J�����C�܂�܂�Ȃ��ǁA���{�b�g�ƊJ���������čs���Ă����̂��ȁ[�[�@(^^�U�@
�@
���܂����`�A����Ɗߕ��ׂ̕���������v�Z���s�ɂقڐ������܂����B�@
�܂��A��Ȃ��ł̌v�Z���s��
���葫�Ȃ̂ŁA�܂������������肪�Ȃ����Ă����Ă��܂��܂��B
���ɕ����ł̌v�Z���s��
�܂����S�ȃO���b�v���s�ɂ͂Ȃ��Ă��炸�A���������ʂ��X���b�v���̕��s�Ȃ̂Ń_���_���Ȃ̂ł����A�܂����������悤�ɂȂ�܂����B���ɓ���������đ��̏オ��l�q������ƁA�܂����S�ɑ̏d���ڂ��Ă��炸�A�������K�v�����ł����A�Ƃ肠�����́u���������v�ł��ˁB�@�Ƃ������ƂŁA�J�[�y�b�g�̏�ł͂܂������Ȃ������ł��B
�ł��܂��A����Ő�ɐi�߂邩�Ȃ��B�@���̏����ƁA�������̕��e�����������˂ȁB�@����ł���ƃI�T���e�q�̃v���b�V���[�˕Ԃ����Ƃ��o�������ł��B
���̓����O�̏�ł������邩�ǂ����ł��ˁB
���Ƃ́A�����x�Z���T�[�̓��ڂƃ��[�V�����Đ��̃v���O������g�܂˂Ύ������s���ł��Ȃ��ł��ˁB�@�����ƁA�o�b�e���[�Ď����K�v�B�}�C�R���ς܂Ȃ����
���X���P�X����
�C��������A�x�ɓ˓��B
����͒��������֏o���B�@�����̔�s�@�Ŗ߂��Ă��܂����B�@�Ă����蒩��Ԃ̔�s�@��\���Ǝv���ăz�e�����W���O�ɏo�ċ�`�ɒ����ă`�F�b�N�C�����������Ă���s�@�͂P�P�����B�@�������ǖ���Ȃ��B�@��l�����A�ɂ����A���������ĂȂ�����ȂH�ׂ���Ęb���Ȃ����A�A�L�r�V�[�R���Ԃł����B
�@
�������c���Ȃ��������O�ɁA���̏��]�̕��s�����͍���Ƃ��ׂ����Ǝv���A���̏��]�̕��s�����ɒ���B
���ڕWZMP�B�@�X�^���X��80�o�A������50mm�ɂ���ƁA�قڐ���`�����Ⴄ��ł��ˁB
�������ďd�S�O���B
���Ƃ͂���ɍ��킹���p���������[�`���������Ί����B�@���ꂪ�Ă�����̂����B(^_^;)
���X���Q�P����
����͏H�t���Ŕ��������Ă����l�����\�����悤�����ǁA�N�ɂ����Ȃ������ȁ[�A�@���傱���Ɣ��o���ɍs���Ă����̂ł����B
�@
�A�x���R���ځA����������͍��h�Ȃ̂ŁA�����͐F�X�d�グ�˂B�@��Ԃ�肽���̂̓R���\�[���P�[�u���̖������B�@����A���[���Ƃ��Ȃ���Ǝv���A�ʓ|�������Ƃ܂킵�ɂ��Ă����B
RS232C�̃h���C�o�[�h�b���w�������̂ł��Ƃ͂͂t���B�@3.3V�d�������̂��ʓ|���Ƃ��A�P�[�V���O���ǂ����悤���Ƃ������������Ă������A�Ȃ�ƂȂ��w���������[�܂肻���ȃP�[�X�������Ă����B�d�������グ�Ă͂t�������邱�ƂɁB
�o�b���͂w�������Ƃt�r�a�R���o�[�^�Ȃ̂ŁA�P�[�X�ɓ���ăR�l�N�^�����J���邾���B�@�����P�[�X�̐F�Ⴂ�Ƀ��{�b�g���̂w�����������߂���肾�������A���{�b�g����RS232C�h���C�o�[��A�s�b�`�ϊ���A�w�������ƂR�w�\���Ȃ̂�Y��Ă����B�@�������I�[�o�[�ł͂���ˁ[(>_<)
�����ށA�����ł��Ȃ������ł������ƍl���邤���ARS232C�h���C�o�[��ƃs�b�`�ϊ������ׂ������ɂ���Ύ��܂肻���B�@���ށA�����������B
RS232C�h���C�o�[���A�܂�0.635�s�b�`�ŁA�z���n�����������A�Ȃ�Ƃ������B�@�ǂ������V���[�g���Ă���悤�����A���������ȕ����Ƀn���_�S�e�ĂĂ݂��玡��܂����B�@�͂��͂ݏo�Ă����ȁB
�V���[�g���������炷��Ȃ�Ȃ���܂����B�@���O�Ƀ{�[���[�g�����킹�Ă�������͂����̂łȂ����ē��R���B�@�܂��悩�����悩�����B
 �@���@������͂o�b���B�@�������͔����Ă����܂�܂Ȃ̂ŃP�[�X�ɓ��ꂽ�����B
�@���@������͂o�b���B�@�������͔����Ă����܂�܂Ȃ̂ŃP�[�X�ɓ��ꂽ�����B
 �@���@�摜�^�̃v���X�`�b�N�{�b�N�X�ɂw�������������Ă�B�@���̕����ɂ����ꏊ�������̂ʼn�������ł݂��B
�@���@�摜�^�̃v���X�`�b�N�{�b�N�X�ɂw�������������Ă�B�@���̕����ɂ����ꏊ�������̂ʼn�������ł݂��B
���āA�����̍��h�̏��������A�A�A�@�����ڂ��o�߂Ă��炾�Ȃ��B�@�ߑO���ɂ͏o���������Ȃ̂����A�����ɒ����̂��낤�B
���{�b�g���v��̂��H���Ă̂���肾���ǁB(^_^;)
���X���Q�R����
������獡���ɂ����āA�֓��g���{�b�g���K��h�ɍs���Ă��܂����B�@�M���閧��n�A�X�e�L�߂��ł��B�@�����Ĉ�̂܂��Ȃ���S�����Ă�������҂�������A�����������ł��B
�y���������̂ł����A�A�Q�܂����ŐQ��͍̂����ɂ����Đh���ł��ˁB�}�b�g���X������ȁB
����͔��܂肾�����̂ŁA�Ԃňړ������̂ł����A�䂪�Ƃ̎Ԃɂ̓i�r�����ĂȂ��B�@���i�A�Ԃ��g���̂͌��܂����Ƃ���̍s���A�肾���Ȃ̂Ŗ��Ȃ��̂����A����͂������Ƀi�r���~�����B�����ŁA�̎g���Ă����u�`�h�n����������o���ăi�r���E���[���o�������܂����B
��肩��A�N�A���C����ʂ��āA�[���������c�f���Ĕ閧��n�Ɍ��������Ƃ����̂����A�؍X�Âɓn�����r�[�Ƀi�r�������������B�@�ǂ����덷��200���[�g�����炢�����Ăǂ����Ă��}�b�v�}�b�`���Ȃ��悤���B�@�i�r�点�Ă���ƁA�o�H�ĒT�����������Ă��܂��̂ŁA�i�r�͐��āA���݈ʒu�m�F�p�ɂ��ĂȂ�Ƃ���n�ɂ��ǂ蒅���܂����B
�A��͌덷�̃Y���̃N�Z���c���ł����̂ōs�����͂���Ȃ�ƃA�N�A���C���ɂ��ǂ蒅���܂����B�@�M�����o���̂�16���A�Ƃɒ������̂�19�������ĂƂ��ł����B
�@
���h�O���Ɉꐶ���������Xbee�̖����R���\�[���P�[�u���ł����A�o�C�i���[�̓]��������ƁA�ȍ~�[��������̑��M���t�����Ȃ��Ȃ��肪�������Ă��܂��B���h�̏�ʂł͒f�������܂������Ǝv�����̂ł����A������悤�ł��B�@�Ƃł�蒼���Ă݂�Ƃ܂����M���t����悤�ɂȂ�܂����B�@�o�C�i���[�ʂ����߂ɂȂɂ����Ȃ���Ȃ�Ȃ����Ƃ���̂��B�@�܂����o�C�i���[�f�[�^�͒ʂ��Ȃ����Ď��͂Ȃ��Ǝv���̂����B�B�B
���h���ł��������Ȃ��Ă��̏�ł͒���Ȃ������̂ɁA�Ƃɒ������璼���Ă��B�B�B�@���������ĂċC���������A���������Ȃ��Ă�̂̓��{�b�g������Ȃ��Ăo�b���ł́I�H�@���{�b�g�͍��h��ł��d���̓���Ȃ���������������Ȃ������B�B�@���h���ł͓d�������Ȃ������A�ƂɋA���Ă���d�������Ȃ������̂͂o�b���B�@�Ǝv���Ď����ɂo�b������x�����đ}�������Ă݂�Ƃ܂��R���\�[�����t����悤�ɂȂ�܂����B�@���Ƃ̓o�C�i���[��ʂ����@���ȁB�@����A�����v���O�������������߂Ȃ��̂Ȃ�S�R�Ӗ������B
����̍��h�A����ڂ͓�������Ȃ�A�r�[�������ݎn�߂ă��{�b�g�͑S�R�G�炸�������̂ł����A����ڂ͂܂�����Ƃ�����Ԃ̒��ŁA�f�o�b�O������R�[�f�B���O�����肵�܂����B�i���̂������ȒP�ȍ�Ƃ������ĂȂ��ł����ǂˁj�@���q�悩�����̂ŁA���̂܂ܓ����o�����I�Ɗ��҂����̂ł����A�����܂ł͓��炸�B�@�ł��������������C�z���ȁB
���X���Q�S����
�w�������ł̖����R���\�[���P�[�u���ŁA�v���O�����̓]�����o���Ȃ����ɂ��āA�Ȃɂ��肪���肪�Ȃ������ׂĂ݂����A�Ƃ肠�����肪����Ȃ��B�@���߂Đ�����s��i�߂悤�Ƃ����̂����A��m�F�������������Ƃ��������̂ł��ꂾ���m�F���āA�A�@�Ǝv�����炻�̂܂܍���͂w�������c�����ɂȂ��Ă��܂����B�@�����Đ��ʂȂ��B
����A�o�b����̓]���͏o���Ȃ����ASEMB����o�b�ւ̓]���͏o���邱�Ƃ��킩�����B�@�K�b�N���A�A�A�B�@����͂o�b���̓]���\�t�g�̖��Ȃ̂��H�@���Ȃ݂Ɏg���Ă���̂͂s�������s�������B�@�O�̂��߂ɂg���������s�������ł������Ă݂����A�ς��Ȃ��B�@�g���������s�������̕������g���C�̗l�q�����j�^�[�ł����肵�Ă悢�ˁB�S�̂Ƃ��Ďg���ɂ������ǁB
����M�̂k�d�c�̓_�ŋ������ƁA��M�����G���[�ōđ��v�����o���Ă���ɂ��ւ�炸���M��������ɉ����Ă��Ȃ��l�q�B�Ȃɂ��藧�Ă͂Ȃ��ł����˂��B
�v���O�����]�������L�����ĉ^�p�͂߂�ǂ��������ėL�蓾�Ȃ����B�B(>_<)�@�����A�܂����ׂȎ��Ԃ��߂��čs���`�B
���X���Q�W����
ROBO-ONE�x�R�A�s���Ă��܂����B�@��ʔ����̂��C���������̂Ŗ�s�o�X�ł̋��s�R�ł������ǁA�����̎d�����������Ȃ��܂����B�i�悩�����`(^�B^)
���������A�O�c����͂��������ł��ˁ[�B�@�^�����悤�Ƃ͂��Ȃ����������ȁB�B�@�I���j�{�[���͒N�����^�����Ă��邾�낤����F�����͍���Ń��M�����[�V�������ς�邾�낤�Ǝv��������ǁA�����^�C�v�̓������{�͏o�Ă����B�@�O�c�����������s���Ă��܂����̂ŁA�܋���20���~�ǂ܂�B�@���ꌩ��Ɛ^�����č���Ă݂����Ȃ��Ă��܂��B
���y���ꐶ��������Ă����ϑԑ���͌����ȃf�r���[�B�@���̑��x�ł̎��R�ȑ��s�͂��Ȃ肷�炵���ł��ˁB�@�Ȃ������{�J�b�v�S���b�O�X���[�O�̃A�C�{�̑�����v���o�����B�@�A�C�{�̏ꍇ�̓X�^���_�[�h�X�^�C���ɂȂ������ǁA���y����̂́A�A�Ȃ�Ȃ����낤�Ȃ��[(^_^;)
�����͈��݉�̗\�肾�������ǁA���j���ɔ������������������Ɏ���҂֍s�����ƂɁB�@�������ɂЂт��͂����Ă܂�����A�A�ƃC���v�����g�̃p���t���b�g�o���ꂽ��B(>_<)
���݉�̗\�肾�������獡���̍�Ƃ͒��߂Ă����̂����ǁA���܂��ɋA���Ă����̂ł�肩��������������s�̃f�o�b�O�B
�V�~�����[�V�������Ɩ��Ȃ��̂Ɏ��@�ł͕ςȓ��������Ă��܂��B�B�@�����Y��ŁAZMP�̌덷����[�v�ł̌Ăяo�������A����p����Ȃ��ăJ�[�u�p�ɂȂ��Ă���̂ɋC�t���܂����B���Ƃ͊��ɔ����Ă���o�O���Όp�����s���������܂��s���͂��B�@������s���قڊ����ł��B
�������Ă݂�ƁA���ו�Ȃ�����3���ڂɂӂ��Ƃ�ł��܂����ǁA����肾�ƁA4���̃��[�V�������Ō�܂ŕ�������܂��B���ו�����[�I
�@
�������{�b�g�J���̎��Ԃ���ꂽ���Ă��ƂŊJ����ƌv����u���O�ɍڂ��Ă܂����ǁA�@�z���g�ɂ���ȂɃ^�C�g�ɍ�Ƃł����ł����[�I�@���ɂ͂ł��Ȃ��@orz....�@���{�����ɏo�ꂷ��݂�Ȃ͓O��Ń��[�V�����d���肵�Ă��邯�ǁA��������������Ɛ�Ώo���Ȃ��B�@�d���ł��قƂ�ǓO�邵�����ƂȂ�����ȁ[�B�@����Ȃ���ȂŎ����̃w�^�����������Ă��܂����B�B
���X���Q�X����
�������[�I�@������s�����i���Ǝv���j�@���܁A�u�����v���ď����āA�����ƁA�A�A�E�������J�n�ʼnE����̃p�^�[�����������ĂȂ��ȁA�Ǝv���܂����B�@�ł��A�܂�������B���ꂭ�炢�͍��ׂȖ��B�@����ɂ́A�܂����s�J�n�����͌��߂����Ȃ̂ŁA���i���s�ƐD������ē������ɂ͂��������L�q���K�v�ł͂���̂����B
������s�͑O�i�E��ށE�J�[�u���s�Ɣ�ׂ�Ɗi�i�Ɉ��肵�Ă���B��Ԉ��肵�Ă��Ȃ��̂��O�i(>_<)�@��ނ�������s���J�[�y�b�g�̏�ŃO���b�v���s�ł���݂����B�O�i���s���p�����[�^��������O���b�v���s�ł���낤�ȁA�����ƁB
����ɂ��Ă����ו�͂Ȃ��Ȃ����炵�������Ă���悤�ł��B�@�ǂ̕��s�����ו�Ȃ��ł͈��肵�܂���B
������s�f�o�b�O���Ɍ����Ă����ʃo�O���C�����āA�����̒����L�q�����������čs���܂��傤�B�@�T�C�h�X�e�b�v���L�q�������Ƃ��낾���A�L�����Ȃ����Ȃ��B�@�@�R���g���[���ő���ł���悤�ɂȂ����瓮��A�b�v���܂��B
�@
ZMP�K�͂̌v�Z���@�͕��s�ȊO�ɂ����p�������܂��B�@�_���X���[�V������L�b�N���[�V�����ɑ��ēK�p����ƁA���肵���d�S�ʒu�邱�Ƃ��o���܂��B�@���̓��[�V�����������ŁA����͒ʏ�̃A�j���[�V�������[�V�������ƌv�Z�����d�S�ʒu�f���邱�Ƃ��ł��Ȃ��̂ŁA�㐔�\���i�p�����[�^�\���j���ł��Ă���K�v������܂��B�܂��A�㔼�g�̓����̓A�j�����[�V�����ō\��Ȃ��̂ŁA�d�S�ʒu�����鑫�̓����������t�L�l�Œ����ł���悤�ɂ��Ă����������Ęb���ȁB�@�����ɃL�b�N���[�V������ZMP�K�͂Ōv�Z�����Ă݂悤���ȁB�@�@�ł��A�A�{�[���̔����̕\�����ł��Ȃ������B�B(^^�U
�@
�����A�o���ɍs����������̖{���Ō������ؓ��̖{�B�@1500�~�̊��ɂ͏ڂ����L�q����Ă���B�����̋ؓ��̎�ނ̑��l���ɋ����B�@�G�L���������ł���ߍ\���i���̂��A�����ǁj�@��ڎw���čw�����邩�B
���P�O���R����
���{���������̌��j������A���ʉ��f���Ď���ҍs���āA�Ηj���͏o���A���ƈ��݂ɍs���āA�Ȃ����������ɂȂ����̂ŋ��j���͂܂������ƂɋA�鎖�ɁB�@�����A���j���͖{������ł݁[��Ȉ��݂ɍs�����������̂ŁA�ƂɋA���Ă܂����肵�Ă����Ƃ���ɕ�������u�ǂ��ň���ł�H�v�Ɠd�b��(^_^;)�@�Ȃ��y�������ȕ��͋C�������̂ł܂������A�����̂����������B�B�B
�@
������s���o����悤�ɂȂ����̂ŁA�R���g���[���[�ŏc�����s�ɕ�������悤�ɂ���B
�R���g���[���[�O��őO��A���E�Ő���A�߉����ŃJ�[�u���s�Ƃ�����ɂ��Ă݂�B�@������s�ł́A���s�Ō�ɑ��������Ƒ�����Ƃ�����������Ă��Ȃ��̂ŁA����O�i��J�[�u���s�Ɉڂ�ꍇ�Ɏp������荞�ޕK�v����������A�@���̏o�������E�̂ǂ���ɂ��ׂ��������߂��肵�Ȃ���Ȃ�Ȃ��̂ŐF�X�ƋL�q��lj��B
�r���A�������ƃS�c�S�c�����悤�ɂȂ�A���ׂĂ݂�ƈȑO�̕5rad�Ƃ����̂��������Ă���I�H�@�p�������߂Ă���d�S�I�t�Z�b�g�����߂Ȃ���Ȃ�Ȃ��Ƃ��낪�f�^�����ɂȂ��Ă��������Ƃ킩��܂łɐ����ԗv���������������B
�ڂ��ڂ��ƕ����悤�ɂȂ�܂����B�@�Ȃ��킩��A�����܂��܂������Ă��Ȃ�����������̂͌����s���Ȃ̂ŋ��炭�ǂ����ɂ܂��o�O������̂ł��傤�B
���܁[�ɏo�����ԈႦ���肷��̂��o�O�Ȃ̂��낤���A���܂ɂ����o�Ȃ��̂͂Ȃ��H����Ȃɕs�m��v�f�����������Ȃ��B�@���A���ƁA�Ȃ����E�ɋȂ���Ȃ��B�@�������o�O�Ȃ̂��낤�B
�{�i�I�Ɍv�Z�������������āA���܂܂ō�������ł͈�ԕ����Ă�����ۂ��B�@�������炢�ɓ���A�b�v�������ȁB
�f�o�b�O���I������A���[�V�����Đ��Ɏ��|����˂Ȃ�Ȃ��ȁB�@���N������3���������Ȃ��B�N���������炷���Ɂu��ف[�v�B�@�Ԃɍ������Ȃ��B
���P�O���S����
���E�ɂ̓J�[�u���s�ł���悤�ɂȂ�܂����B�@�o�O�ǂ��납�A��]���a�̐ݒ������L�q���Ȃ������B(^_^;)
���P���̒��������郉���_�@�ϊ����ăL���v�V�����Ƃ����悤�Ƃ������ǁAAVI�ɕϊ���������Ȃ��Ă��܂����̂Ŗ��ҏW�ŁB
���s�͖{���ɉ����[���āA���������Ă��I��肪�Ȃ��̂ł����A���{�b�g������������̂������_���{�b�g�������̖ړI�Ȃ̂ŁA���s����Ƃ����킯�ɂ��s���܂���B
�@�@�@���Ƃ����Ă��A����3�N���炢���s���������Ă܂���(^^�U
��ف[�Ŏ����Ń_�b�V��2000��1���ȓ��ɃN���A�Ƃ����̂����ʂ̖ڕW�Ȃ̂ŁA�܂��͂��̖ڕW��B�����邽�߂̍Œ�����𐮂��邱�Ƃ��ɂ��čs�������Ǝv���܂��B�Ƃ肠�����A���s�ɂ��Ă�肽�����nj�ɉ��Ƃ���Ă������B
�@�����Z���T�[�����āAZMP�x�[�X�ł̃t�B�[�h�o�b�N����
�AZMP�K�͕��s���[�`���̈�ʉ��B�@ZMP���^����X�e�b�v�����@���@�_���X���[�V�����E�T�b�J�[���[�V�����Ȃǂւ̓K�p
�B�M�_���ɂ��g���N�ቺ�����m���ĕ�ʂ�
�E�E�E�����Ƃ����ς��L�����悤�ȋC���������A�v���o���Ȃ��B�@�v���o������NjL������Ă��ƂŁB
�@
�Ƃ���ŁA�}�[�L�����[�r��SEMB1200A�ō\������Ă��郉���_�E�}�[�L�����[�ł̌v�Z���s�v���O�����B�@���������Đl�͋���̂��낤���B�@�u�q���[�}�m�C�h���{�b�g�v�Ƃ������ȏ��ɏ����Ă��鎖���������������Ȃ̂����A�u����������Ă݂�����������i���킩���v�Ƃ����l������̂ł͂Ȃ����Ǝv���܂��B���������l�ɂƂ��ẴT���v���ɂ͂Ȃ邩�Ȃ��Ǝv���܂��B�@��������������l�����܂����烁�[�����f���ɏ������݂��肢���܂��B�Еz�����J���������܂��B
�����s�̕\���Ƃ��A�p�����s�Ƃ��A���ו�Ƃ��A���ȏ��ɏ����Ă��������Ɠ�����Ƃ�A���ȏ��ɂ͏����ĂȂ����Ƃ����\����̂Łu�������������v�Ƃ����̂͌����������ȁB
���āA���[�V�����Đ��ƃG�f�B�^���T�N�T�N�ƍ���āA�����J�����Ɉڍs���悤�I�@���A���Ɖ����x�Z���T�[�̎������B
���P�O���V����
���[�V�����G�f�B�^�쐬���B
�v���O�����I�ɂ͉����ʔ����Ȃ��̂łȂ��Ȃ��i�܂Ȃ��B�@���̏�A�}���}�V���C���^�[�t�F�C�X�͈�ʂ�K�v�Ȃ̂ŁA�L�q�͂�������̂łȂ��Ȃ��ɐh����Ƃł��B
�����قǃ��[�V�����I���ƃt���[���I���E�t���[���lj��폜�̋L�q���ł����̂œ������Ă݂���A�A���{�b�g����\�ꂵ�ăT�[�{�z�[�����������т܂����B(>_<)
�܂����{�b�g�������̂͑�������(^^�U�@�@�G�f�B�^���ł�����t���b�V���ւ̏������݂Ɠǂݏo�������˂Ȃ�Ȃ��B�@�߂�ǂ����[(�[�[;)
���P�O���X����
���[�V�����G�f�B�^�쐬��
�t���[���ҏW�̕����̃f�o�b�O�Ɏ�Ԏ���Ă��܂��A�����������������B�@���K��܂łɂł��Ȃ����Ȃ��ƒW���ڕW�𗧂ĂĂ�����NJ�]�͖A�Ə����܂����B����3�����B�Q�Ȃ���ȁB
����ƒ��i�i�J�[�u���s�܂ށj�̐ڑ��ŁA�������s������o���Ă��܂��B�@���ɐ�����s���璼�i�Ɉڂ�P�[�X�ł͂��܂��ڍs�ł��܂���B���������Ȃ������͋C�ɂ��Ȃ��Ă��ڑ��ł���͂��Ȃ̂����B�B�@���[�V�����G�f�B�^���o������f�o�b�O���܂��B
�����͗��K��B�@�����O�ŕ����Ȃ������Ƃ��̂��߂ɕ�l�p�����[�^��������������悤�ɂ����͂��Ă����܂����B�@�G�f�B�^���������Ă���A�ו��͏��ʂł��̂����ǁA����ς�t�������ōs���Ȃ���Ȃ�Ȃ��ł��ˁB�����ڂ�B
���P�O���P�P����
����̓��{�b�g���K��B
�V�z�r�[���{�b�g��Ẵv���[�������邩��Ȃ̂��ǂ����͕s�������A��ڂƂ܂̒����l�ł��ӂꂩ����قǂ̎Q���҂�����Ă����B�ΐ삳��̘b�ɂ��Əu�ԍő�33���̎Q���E���w���������������B
��w�̃C�x���g�̑ł����킹�Ƃ��C���h����̂��q����Ƀ��{�b�g���������l�Ƃ��A�v���[������l���v���[�������l���A�o���J���łl��烍�{�b�g�������������肷��l�ł������Ԃ��Ă܂��āA���T���N�ƃ��{�x�[�V�b�N�̘b�����邱�ƂɂȂ��Ă��̂����ǁA�A�ׂɍ����Ă�̂ɑ吺�o���Ȃ��ᐺ���ʂ�Ȃ��B(^_^;)�@���T���N�A�����ƍׂ����b�͕ʓr���܂��傤�B
�����_�������O�ŕ������Ă݂��̂����A�Ƃ�MDF�{�[�h���̓O���b�v������炵���Ă�����ƕs���肾�������܂��\�������܂����B�@����Ő퓬�@����т܂���Ă��钆���Z�X�i�Ŕ��ł�݂����Ȋ����������ȁB
1��0.5�b�A����50�~�����f�t�H���g�ɂȂ��Ă��邪�A�����͂��������L���Ă��ǂ���������Ȃ��B
����͂���ł悩�����̂����A�F��Ȗ�肪���o�B
�@SEMB1200A�̃f�B�b�v�X�C�b�`�ݒ�ŁA���[�U�[�v���O������d��ON�Ŏ��s������ƃT�[�{ON��exception�����B�@���[�_�[����N������̂Ƃł͉����������قȂ�̂��H�@��̓I�ɂǂ��ł�����̂��͖����������ǁA�A�����A�₾�Ȃ�(>_<)
�A���[�V�����ҏW������ɓ��������Ƃ���ƁA�T�[�{ONOFF�̃^�C�~���O�ŃT�[�{���\���B�@���@��荞�ݕs�����炭��s����낯�ǂ܂����������ĂȂ��B
�B���T�[�{�Ƀt�@�N�g���[���Z�b�g�����������B�@�P�����T�[�{�Ƀg���N������Ȃ��Ȃ��Ǝv���Ă�����`�����l���ݒ肩�烊�Z�b�g���������Ă����B�@�Ȃ��I�H������I�H
�C�㔼�g�T�[�{�̃g�����������B�@�g������������Ȃ��āA�v���X�`�b�N�̃z�[���g���Ă��邩��Z���[�V�������Ȃ߂��Ⴄ�̂��ȁH�������r�[�ɃK�N�b�Ƃ���āA�����z�[���Ȃ߂��������Ǝv���Ă݂Ă�����ĂȂ��B�@���������đg�ݗ��Ă鎞�ɒ��r���[�ȃn�}������Ă����̂����B�B
�D���܂Ƀ��[�V������������B�@�s����ɃT�[�{�ɑ��M���Ă���t���[���������邩�̂悤�ȓ���������B�@�X�g���[�������ŃX���[�v�b�g���Ⴂ���݂����Ȋ����B�@����͋N����Ȃ��v�Ȃ̂����ȁB�@�s����Ȃ̂ō������ȁB
�A�͗��K��O��ɂ͊��ɔ��o���Ă��āA�f�o�b�O���ɃN���u�V���R���ė������鎖��������܂����B�@�܂��͂�����Ȃ��Ɠ������̂��|���B�@�ǂ����T�[�{�̃I���I�t�Ǘ��̂����������Ă���o�O�炵�����Ƃ܂ł킩���Ă���̂Ō��ۂ𑨂��ďC���Ō��ۂ������邱�Ƃ��m�F���Ȃ��ƂˁB�@��C�^�C�ł��B
�����O�ŕ������Ă���ƁA�܂��C�K�A����d�S�ʒu�����������Ǝw�E���B�@��`�A�m���ɂ����Ȃ�ȁB�Ȃ������s�����p�����O���ɂȂ��Ă���B�@�v�Z����������ΖڕWZMP�ɂ��킹���p�������͂��ŁA�Î~���̎p���͐Î~�d�S�ɍ��킹�Ă���͂��B�@�����ʒu��RPU-100��w�����Ă���̂ł�����������d�S�͌��肩������Ȃ����ǁA����Ȃɂ�����ł͂Ȃ������͂��B�@�@�@���̌�A���ςς���ɂ��ЂƖڌ��āu�i��ڂƉ��ڂ́j�p�x���Ⴄ�̂͂Ȃ��H�v�ƁA���l�̎w�E���܂����B�@�������̓x�e���������͂ЂƂߌ��ĕ����郂�[�V�����̏��������Ď����ł��ˁB
�m���ɍ��̌v�Z���s���ʂ��ƑO�i�͌�ނ��s����ŁA�w�E�̓��e�ƈ�v���܂��B������Ƃ��v�`�F�b�N�ł��B
���낻����������y�[�W���鍠���ł��ˁB�B
�@
�I��Ə�
���[�V�����ҏW������ɃT�[�{ONOFF����ƃT�[�{���\��錏�͔����B
�g���NOFF������Ƀg���NON����Ƃ��̓L���v�`���[�f�[�^���Q�Ƃ���̂����A���[�V�����ҏW��������̓L���v�`���[�f�[�^�����������Ȃ�ꍇ������B�@�L���v�`���[�f�[�^�����j�^�[���Ă��ċC�t�����̂͂ǂ����z�肵�Ă����M�f�[�^���ȏ�̃f�[�^�������ė��Ă��邪�A��M���͂��̂悤�ȏ�Ԃ�z�肵�Ă��Ȃ��̂ŁA���������Ȃ������Ƃ̓f�[�^������Ă��܂��A�L���v�`���[�f�[�^�Ƃ��Ă������Ȓl�������Ă��܂��B
�Ȃ��z��ȏ�̃f�[�^��������̂��H�@��������[�V�����ҏW���ɁH�@����́A���荞�݃��[�`�����Ń��[�V�����ҏW�̃��j���[�\�������Ă�������ŁA������x�ȏ�̕������ɂȂ�ƁA�T�[�{�̎�M�^�C�~���O�����Ă��܂��A��M�f�[�^������Ă��܂��B
���j���[�\�������C�����[�v�Ɉڂ��āA��M���[�`���ł͕s�v�f�[�^������ꍇ�͔p������悤�ɏ�����lj������B�@����ŃT�[�{���\��錻�ۂ͊����ł��B�悩�����B�B
����̗��K��ŁA�����_���u���u�����������̂����āA�I�T���n�n���������̓u���u�����Ă��Ȃ������̂ɁB�B�ƌ����܂����B�@�m���ɈȑO�͂���ȂɃT�[�{���u���u�����邳���Ȃ������̂ɁB�@����̓T�[�{�z�[�����Ȃ߂Ă��܂����̂��g�����Œ�����������ŁA�g�����l���������Ȃ肷�����i�������̓u���u������|�C���g�ɂȂ��Ă��܂����̂��j���߂ŁA�T�[�{�z�[�������ʂ�ɒ����āA�g�����l���߂�����u���u�������܂�܂����B
�����āA�D�̃��[�V�����������錏�ł����A�A�̒��������Ă��鎞�ɁA�T�[�{�Ƀg���NON�����ꍇ�Ƀ��b�Z�[�W�ƃT�[�{�p�x��\������悤�Ɏd����ł������̂ł����A������s�����Ă���Ƃ��܂ɃT�[�{�̃g���NON���N�����܂��B�@�o�O�Ȃ̂��A�R���g���[������̎�M�f�[�^�������Ă���̂��͂킩��܂��A�قڐ�����s���ɂ����������Ȃ��Ƃ��������ƃf�[�^�G���[����Ȃ��ăo�O�̂悤�ȋC�����܂��B�@�ł��A�ԈႦ�ăR�}���h�𑗂�o�O���čl���ɂ����Ȃ��B
�I�I��Ə�
�t���[���������錏�A�ϐ������j�^�[�����Ƃ���R���g���[������̃f�[�^�������Ă���悤�Ɍ������̂ŁA2�x�ǂ݂��Ă݂������P���Ȃ��B�@�������Ȃ��甭���̌X��������ƁA����łP�����������ꍇ�A��]�łP���A���ɉ�]���ĂP���ōČ�����B�@�����ށA�Ȃ�Ȃ���́B
�Ƃ����Ƃ���Ŏ��Ԑ�B�@���C�g�V���[�ŁuATOM�v�ςɍs���Ă��܂��B��ˍʂȂ�ȁA�A�g���̐��B�@���ƁA���q�͂���Ȃ��ău���[�R�A���Ă����N���[���ȃG�l���M�[�œ����Ă��ł��ˁB���ꂶ��A�g������Ȃ������B
������̍�Ƃ����X�Ɛi��ł܂��ˁ[�B�@����ɂ��Ă��������W���͂Ɛ��m���ł��ˁB���͂P���i��łR�����炢������Ȃ����Ƃ��Ă���̂ɁB�B�B(>_<)
�I�I�I��Ə�
�t���[�������́A�R���g���[���̎�M�Ɏ��s���āA�R���g���[���ڑ����P�t���[�����x���Őؒf�������̃f�[�^��舵���~�X�ł����B�ؒf���������{�^���̕ω������Ă��B�@�ł��A������s�̍ۂɂ��̌��ۂ��N����Ղ������͕s���ł��B
���Ď��͏d�S�ʒu�����������_�ɒ��肵�܂��B�@�v�Z�ɂ��ƁA�O��d�S��11mm�قnj���B�Ƃ��낪�A���s����30mm���炢�O�X���Ă���̂ʼn��������������ł��ˁB�������A�t�L�l�̌v�Z�̍ۂɃI�t�Z�b�g�l���v�Z�ɓ���邩����Ȃ����Ŗ������o�����B�B�@�����̂Ƃ�����ă`�F�b�N�ł��B
�g���ɂ�������ǁA���[�V�����G�f�B�^�͈ꉞ�̋@�\������邱�Ƃ��ł��܂����B�ł��A�܂����[�V�����Đ����ł��Ȃ�������(^^�U�@����ɁA���[�V�������t���b�V���Ɋi�[��������o�����肷�镔�����܂��ł��B�@�t���b�V�������ԈႦ��ƁA�u�[�g���[�_��������������肷��킯������|���ł��B�@����͖����̍�Ƃ��Ȃ��B
�I�I�I�I��Ə�
�t�L�l�̊m�F�͂T���ŏI���B�@����ς�s�v�ȃI�t�Z�b�g���v�Z�ɓ���Ă܂����B�@�}�[�L�����[�r�͖{���̎��͒������ɂȂ��Ă��Ȃ���ł����ǁA���z�������Ă����̂��A�������Ƃ��Čv�Z���Ă����Ȃ��悤�ɂȂ��Ă��܂��B�@�Ȃ̂Ƀs�b�`���ƃ��[���̃I�t�Z�b�g���v�Z���ɉ����Ă������߂ɂP�T�~���قǂ���Ă����悤�ł��B
�C����̎p���ł́A�O������̏d�S�I�t�Z�b�g��-5mm�ɂȂ�܂����B
����ŕ�������ƁA�O�i����ޕ��݂Ɉ��肵�Ă��܂����B�X���b�v�x�������������Ȃ��ĕ����������܂����B����Ȃ��������������傫���ł������ł��B�@�ł����A�J�[�y�b�g��ŕ��������ꍇ�A��ނ͈ȑO��舫���Ȃ�܂����ˁB�@�J�[�y�b�g���Ƒ��������̂ŏ�����X�C���ɂ��������悢�悤�ł��B�@���グ���@���グ������������悭�Ȃ邩���B
�����͂ǂ��܂ōL�����邩�ƌ������ƂŎ����Ă݂��Ƃ���AMDF�{�[�h�̏�Ȃ�100�o�ɂ��Ă������܂����B�@�����A���i���̓_���_���ł����B�@�w��������������ł͍ő呫����280�o�ɑ��āA270�o�ɂ��Ă������܂����B270�o�ɂ���ƁA������55�o���x�����o���܂���B�@�X�ɑ��Ԋu��60�o�ɂ��Ă����v�ł����B
 �@�@
�@�@
���̏�Ԃŕ�����Η��h�Ȃ��̂ł��傤�B�@�����������Ə��������Ă����������Ȑ����B�@���悢�斲�̕G�L�����s���߂Â��Ă��������ł��B
������ꂼ��J�[�y�b�g�̏ゾ�ƃ_���ł��B�@1���̑J�ڎ��Ԃ�0.7�b�ɂ��Ă݂��Ƃ���A�J�[�y�b�g�ł����肵�ĕ����܂����B
�t�Ɍv�Z���s�͍Đ����x�����Ȃ̂ŁA���������̂͋��ł��B�f�t�H���g1��0.5�b�Ō������Ă��܂����A0.3�b���Ƃ����s����ł��B�@���̓_�ł��o�g����������Ȃ��ł��ˁB
�����ƁA���̓T�[�{��4014�Ȃ̂�4013���g�������������P���邩������܂���B
���P�O���P�Q����
�����̓t���b�V���̏������݂Ɠǂݏo���B�@SEMB�̃u�[�g���[�_�����ɗp�ӂ���Ă���t���b�V���������݊����g���킯�����ǁA���s����ƃu�[�g���[�_���������Ⴄ����Ȃ����ƐS�z���Ă���܂����B�@�������A�ǂ���炱�̊��͂̓��[�U�[�̃f�[�^�̈�ɂ����������݂��ł��Ȃ��悤�ɂȂ��Ă��邩�̂悤�Ȑ����������Ă܂��B�������Ƃ�����ł����ǁA�����Ȃ��̂ŁB�B
�T�d�ɐi�߂����A���A��߂Ȃ����[�V�����̏������݂Ɠǂݏo�����ł��܂����B�@�����A����m�F���Ɉ�x�����������݂��~�X��܂����B���̌�̓~�X�Ȃ��B�@�������݂Ɏ��s�������̎��̓��[�V�����f�[�^���S�Ĕj��Ă܂��āA�Ռ`���c���Ă܂���ł����B�ҏW���ۑ������{�b�g�����ōs���悤�ɂ��Ă���̂����ǁAPC�ւ̃o�b�N�A�b�v�͕K�{���ȁB
�ҏW�R�}���h�̑���Ȃ��Ƃ����p���̏����l���ݒ肵�āA���[�V�����G�f�B�^�͊����ł��B�@�Đ����[�`���͊ȒP�Ȃ̂ŁA���傿�傢�ƍ���āA����ʼn^���n�͂قڊ����B
�������[�V��������邩�ƌ����ƁA���[�V�������͖ʔ����Ȃ��̂ŁA�u���Ƃ��āA���̓Z���T�[�n�ł��B�@�Z���T�[�n�͓]�|���m�̉����x�Z���T�[�ƁA�C���[�W�Z���T�[�A�����đ����Z���T�[��\�肵�Ă��܂��B
�C���[�W�Z���T�[�͂܂�͖ڂȂ�ł����ǁA�ȑO�͏��ド���_�̓������̂܂�����悤�Ǝv���Ă��̂����ǁA��߂Ă��̋@�̐�p�̓�����邱�ƂɂȂ肻���ł��B�f�U�C���I�ɂǂ����}�b�`���Ȃ��̂ƁA�����_�̓��͂�����������ŁA����������Ɖ��ɂ����\���ɂ������ȂƂ��������R�ł��B�Ȃ̂ŁA�����Ǝ��������Ȋ����̖��@�I�ȓ��ɂ��悤���ȂƁA�A�A���������킯�ŁA�����̎c��̎��Ԃ͓��̐v������Ă܂����BCAD�̑O�ł��Ȃ��Ă������őS�R�i�݂܂���ł������ǂˁB
���P�O���P�R����
�Ȃ��g���f������ςȂ��ƂɂȂ��Ă܂��ˁB�@�����C�ɓ���Ȃ������̂��Ȃ��`�B�@�킴�킴�P�ނ�����Ĕ���������Ă̂͂Ȃɂ��̃��b�Z�[�W�ł���ˁB�@��߂Ȃ��Ł[���Č����̂���Ȃ��Ă��̃��b�Z�[�W���K�v������̂���Ȃ����Ǝv���܂��B�@�A�j���C�_�[���}�W�b�N�X�p�C�X�̉�ɗ����畷���Ă݂܂��B
������͔ߖ��B�B�B(^_^;)�@������Ƃ�����exception���o�Ȃ��̂��Ȃ��A�����Ȃ��Ǝv���Ă����̂ł����A�o��������悤�ł��ˁB�@���͊��̃o�[�W�������グ�āA�œK���I�v�V������������o�Ȃ��Ȃ�܂����B�@�����o�[�W��������グ��œK���I�v�V�������v��Ȃ��Ȃ�\��Ȃ̂ŁA���̂��������グ�����ł��B
�R���\�[���ŕϐ��\������ƁAexception���������Ȃ��Ȃ�̂́A�v�Z�@��ɒ[�Ɍ��邩�Ȃ̂ŁA�����m�����������邾�����Ǝv���܂��B�����v�Z�ʂ̓R���\�[���L�薳���ł͂��̂����������Ǝv���̂ł���B
exception���́A�����͂Ȃ���1�������炢����Ă���Ȃ����Ǝv���܂��B������Ƃ����������邱�Ƃ����F�肵�Ă����܂��B
�E�E����Ȃ���Ȃō����͉��ɂ��J�������B�@�����͈��݂ɍs�����Ⴄ�悤�ȗ\�������Ă���̂Ŏ��s�����Ȃ��Ǝv�����Ƃ�����B
�f�W�J�����Ԃ��Ă����̂ŁA����摜���A�b�v�����p���ł̕��s��B�e���悤�Ƃ�����A�����Ęr�������Ă��܂���(^_^;)�@

�܂��܂��ł��ȁB
���P�O���P�S����
�R���\�[���P�[�u���������悤��XBee���ė����̂͂�������ǁAXBee�o�R���ƃv���O�����̏����������ł��Ȃ��Ƃ�����肪����܂����B�@���c����͑��x����������̂ł́H�Ƃ����A�h�o�C�X��������Ă����̂ł����A�t���b�V�����C�^�[�̑��x�ݒ�͌��߂����ŕς����Ȃ��B�@�Ƃ������ƂŁA���c���t���b�V�����C�^�[��UART���x��ύX����v���O����������Ă���܂����B�@����́A�AUART�̐ݒ���������ƁA�t���b�V�����C�^�[�v���O�����̏����ݒ蕔���̎��̃A�h���X������ɃW�����v���Ă���̂��ȁH�i�����ł����ǁj�@�f�t�H���g�ł�115200baud�Ȃ̂ł����A���̃v���O������57800baud�ɐݒ肷��ƁA�����z���Ƀv���O�����̏����������ł���悤�ɂȂ�܂����B�@�v���O�����̏������������܂ł̔{�̎��Ԃ�������̂����ǂ����͎d���Ȃ��ł��ˁB���̂�������ȃv���O�����̂��߂ɁA�����N���A�h���X����ׂ����ƂɂȂ��Ă��܂������ǒv�����Ȃ��B�@���c���肪�Ƃ��������܂����B
���̃T�[�{�z�[�����A���~�ɕύX���āA�A�����͓������̐v�ł��B���̃T�[�{�̓t�^�o��RS302���g������Ȃ̂����A���̃T�[�{���Œ肵�ɂ�����ˁB�F�X�M���M���ł��B�@���}�n���Y�s���ē��̍ޗ��B���Ă��Ȃ�������B
���̃T�[�{�̃X�g���b�`�͌y�߂ɂ��Ƃ������������낤�Ȃ��B�����������ŃM�A�Ƃ�ܑ̂Ȃ�����ˁB
�������������������̐v�B�@����̑��^�т��C�ɓ���Ȃ��̂Ŏ�����������̂����ǁA�܂��͓����̔����i�����Ă���B�B�@�����N�r�ł̌v�Z���s���o�����̂ŁA�X�Ɏ��R�x�𑝂��������N�̂悤�ȍ����������r�\�����l���Ă���̂����A�\���v���Ă���ƁA�C�t���Ƃ������̕��ɃA�^�}���s��������ē����̐v���Ȃ��Ȃ��i�݂܂���B�@��������W�����˂B
�y�j����RT�Ń��[�V�����ƕ��s�̒���������\��Ȃ̂ɂ��̂��߂̏������ł��Ă��Ȃ��B�C�`���烂�[�V�������ƂȂ�����o�b�e���[���Ⴞ�߂�����A�d�����v��Ȃ��B�d�������čs�������Ȃ��Ȃ��B