奐敪擔帍(26)
仭俇寧俀俉擔仭
姰惉偟偨偲偍傏偟偒僇乕僽曕峴僾儘僌儔儉傪幚婡偵堏怉丅
摦偐偡偲寖偟偔梮傝傑偔傞儔儉僟丒儅乕僉儏儕乕(>_<)丅丅丅丂俀曕栚偺専徹偟偐偟偰側偐偭偨偗偳丄俁曕栚偱怓乆栤戣偑弌傑偟偨丅丂擄偟偄側偀丅
傑偨PC偵栠偭偰僨僶僢僌偟偰丄側傫偲偐伀偙偙傑偱丅丂堷宲偓僼儗乕儉偑墭偄偗偳丄懡暘幚梡忋偼栤戣側偄偱偟傚偆丅
偪側傒偵嶐擔偺栭偵偙偙傑偱弌棃偨偺偱幚婡偱摦偐偟偰傒偨傜丄係曕栚偱怴偨側栤戣偑弌傑偟偨丅(^_^;)丂PC偱摦偐偟偰傕摨條偺栤戣偑嵞尰丅
係曕栚偺栤戣傪専摙偟偰偄傞偲偙傠偱丄僇乕僽曕峴拞偵僇乕僽偺夞揮敿宎傪曄峏偡傞偙偲偑偱偒側偄乮曄峏偡傞偲偍偐偟側摦偒偵側傞乯僾儘僌儔儉偺嶌傝偵側偭偰偄偨帠偵婥晅偄偰偟傑偭偨丅
僇乕僽曕峴偱偙傫側偵偰偙偢傞偲偼巚傢側偐偭偨側偀乣丅丂侾曕恑傫偱俀曕壓偑傞丅
仭俇寧俀俉擔偦偺俀仭
偍偐偟偔側傞偺偼夞揮妏搙偑兾傪挻偊傞偁偨傝偩傠偆偲巚偭偰偄偨偺偩偗偳丄巚偄偐偗偢偵怓傫側晄嬶崌偑弌偰偟傑偆偨傔丄僌儘乕僶儖嵗昗偱峫偊傞偺傪傗傔傞偙偲偵偟傑偟偨丅
堦斣嵟弶偼儘乕僇儖嵗昗偱峫偊傞偮傕傝偩偭偨偺偩偗偳丄堷宲偓偺晹暘偑暋嶨側偺偱丄僌儘乕僶儖嵗昗偱恑傔偰偄偨偺偩偗偳丄偙傟偩偗傗偭偨傜丄儘乕僇儖嵗昗偱偺堷偒宲偓傕婰弎偡傞庤弴偑傢偐偭偰偒傑偟偨丅
侾曕偢偮儘乕僇儖嵗昗偱惗惉偟偨廳怱婳摴傪僌儘乕僶儖嵗昗偵曄姺偟偰偮側偄偩偺偑偙傟伀
偮側偓栚偑偪傚偭偲偄傃偮側偺偑傢偐傞偐偲巚偄傑偡偑丄栤戣側偄偱偟傚偆丅
愭傎偳丄慡慻傒崌傢偣偺僥僗僩偑姰椆偟偰丄幚婡偵傕慻傒崬傫偱摦嶌偡傞偙偲偑妋擣偱偒傑偟偨丅丂傗偭偨乕丅
傑偩丄忋敿恎偺張棟偑偱偒偰偄側偄偺偱丄忋敿恎傪庢傝奜偝側偗傟偽曕偗側偄偺偩偗偳丄偳偆偣丄晧壸嶼弌傕傗傜側偒傖側傜側偄偺偱偙偺傑傑愭偵恑傓偮傕傝丅
幚婡偱摦偐偡偲丄傗偼傝exception偑弌傑偡丅丂偁偐傜偝傑偵夦偟偄偲偙傠傪嶍彍偟偰摦偐偡偲丄捈恑摦嶌偺帪偼k_cos( )偲偐k_sin( )偱敪惗偟傑偡丅丂偝偭偒僇乕僽曕峴偱摦偐偡偲丄malloc( )偱敪惗偟偰偄傑偟偨丅丂偦傟偧傟暿偺栤戣偐傕偟傟側偄側偀丅
丂
崱擔偼傢傫偩傎乕偺怽偟崬傒奐巒擔丅丂奐敪偺梊掕偑戝暆偵抶傟偰偍傝丄侾俋擔傑偱偵帺棩偱僟僢僔儏俀侽侽侽傪摦偐偡偲偙傠傑偱偼摓掙偨偳傝拝偗偦偆偵側偄偨傔丄崱夞偺嶲愴偼尒崌傢偣傞偮傕傝偱偡丅丂儔僕僐儞憖嶌偱偭偰側傜傕偟偐偟偨傜側傫偲偐側傞偐傕偟傟側偄偗偳丄偦傟偠傖堄枴側偄傕傫偹丅
仭俈寧俆擔仭
媣偟傇傝偺擔帍峏怴丅
愭廡偼寧梛擔偐傜栘梛擔傑偱枅擔堸傫偱傑偟偨丅丂嵟嬤丄擇擔悓偄偵側傝傗偡偄傛偆側婥偑偟偰偄偨偺偱丄堸傓検傪僙乕僽丄堸傫偩屻偼摐暘偲悈暘偺愛庢偵婥傪偮偗偰傒傑偟偨丅丂堸傓検傪僙乕僽偟偨偺偱摐暘愛庢偺岠壥偼傢偐傜偢丅(^_^;)
偦偟偰丄嬥梛擔偼懪偪崌傢偣偲弌挘偲堸傒夛偺偁偍傝偱偨傑偭偨巇帠傪曅晅偗傞傋偔巆嬈偱偟偨丅
偝偰丄搚梛擔偼媣偟傇傝偵儘儃僢僩傪怗傟傞偲巚偭偨偺偩偗偳丄側乕傫偐僥儞僔儑儞偑忋偑傜側偔偭偰寢嬊儘儃僢僩揑側偙偲偼壗傕偣偢偵偆偩偆偩偲1擔夁偛偟傑偟偨丅丂媥梴偭偰偙偲偱丄傛偟偲偟傑偟傚乕(^^乁
丂
偦偟偰丄崱擔偙偦偼恑捇傪丅
傑偢偼丄娭愡偺僩儖僋嶼弌傪尒捈偟丅丂偄傑傑偱偼捈恑偩偗偩偭偨偺偱丄栚昗ZMP傪尒傟偽巟帩媟偑僴僢僉儕偲敾偭偨偺偩偗偳丄僇乕僽曕峴偩偲丄栚昗ZMP傪尒偨偩偗偠傖偳偪傜偺懌偑巟帩媟側偺偐丄椉懌巟帩側偺偐傢偐傜側偄丅丂偙傟偼儌乕僔儑儞惗惉娭悢撪偱傕摨偠偙偲偱丄偦偙偱敾掕偟偰偄傞忣曬傪庢傝弌偣傞傛偆偵偟偰巟帩媟愝掕偵巊偊傞傛偆偵偟傑偟偨丅
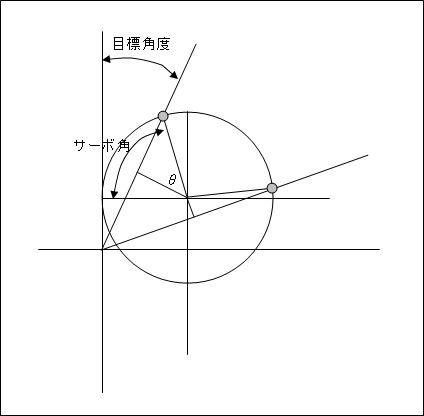
儔儉僟丒儅乕僉儏儕乕偼儕儞僋媟側偺偩偗偳丄儕儞僋傪憐掕偟偨嶼弌偼峴偭偰偄傑偣傫丅丂偦偺偨傔丄寁嶼寢壥偵庤傪壛偊偰曗惓丠傪壛偊傞昁梫偑偁傝傑偡丅丂嬶懱揑偵偼儕儞僋慜懁偲屻懁偱偦傟偧傟幉偑偁傝丄曅懁偼僼儕乕偺幉側偺偩偗偳丄儕儞僋偺偨傔丄慜懁偺幉偲摨偠妏搙偵峉懇偝傟傑偡丅丂偮傑傝丄堦偮偺僒乕儃偱擇偮偺幉傪峉懇偟偰偄傞傢偗偩偐傜丄2幉暘偺晧壸偑妡偐傞偙偲偵側傝傑偡丅
傑偨丄懌庱僺僢僠偲旼乮壓乯僺僢僠丄屢娭愡僺僢僠偲旼乮忋乯僺僢僠偼偦傟偧傟儕儞僋偵偰峉懇偝傟偰偄傞偨傔丄晧壸偼暯嬒壔偝傟傑偡丅乮岺妛揑偵偼暯嬒壔偟偰偄偄偐抦傝傑偣傫乯偦偺曗惓傪壛偊偨偺偑丄偙傟伀
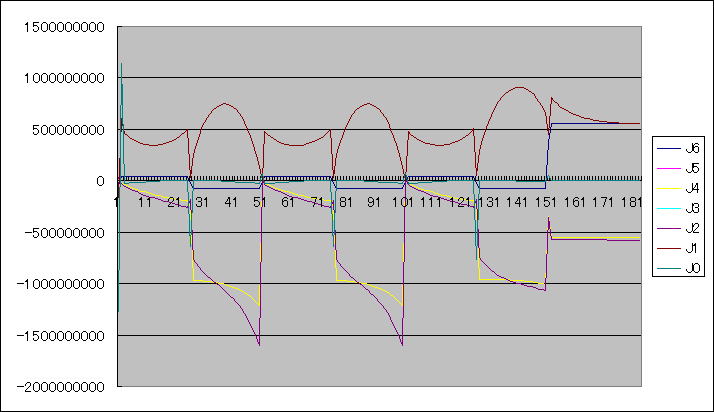
僌儔僼偼塃懌偺娭愡晧壸偱偡丅丂幉懌偲側傞1曕栚偺屢娭愡儘乕儖幉偲4売強偺僺僢僠幉偑戝偒側晧壸傪庴偗偰偄傑偡丅僨乕僞偼壓敿恎偩偗偺応崌偱偡丅慡恎偵偟偨傜傕偭偲戝偒偔側傞傢偗偱偡丅丂懌庱儘乕儖偼ZMP偲傎傏堦抳偡傞偨傔丄偁傑傝戝偒側晧壸偲側偭偰偄傑偣傫丅嵞惗惛搙偑崅偗傟偽嫲傜偔晧壸曗惓偼昁梫柍偄偺偱偟傚偆丅
偠傖偀忋敿恎傪偔傢偊偨儌僨儖偱偺寁嶼傪偟偰傒傛偆偲巚偄丄忋敿恎僒乕儃偺惂屼娭悢傪嶌傞偙偲偵偟傑偡丅
榬偼儓乕幉側偟偵偟偰娙扨偵偟偨偐傜娙扨偵偱偒傞偼偢乣丄偲巚偭偰媡僉僱娭悢傪嶌傠偆偲偟偨傜丄夝偗側偄丒丂夝偗側偄両丂偙傟傕偟偐偟偰儎僐價儎儞偠傖側偒傖夝偗側偄偺偐丠偲巚偭偰奺暥專傪挷傋偨傜丄偢偽傝崱夞偺榬偺峔憿偺媡僉僱寁嶼偑弌偰偄傞杮偑偁傝傑偟偰丄庤愭偺巔惃妏搙偑側偗傟偽夝偗側偄傛偆偱偡丅丂婋側偄婋側偄丅
師偵摲懱僺僢僠偵挿墌儕儞僋傪巊偭偰偄傞偺偱丄偙偺曄姺娭悢偑梫傝傑偡丅丂偙傟偼墌偲捈慄偺岎揰傪媮傔傟偽傛偄傢偗偩偗偳丄俀師娭悢傪夝偗偽偄偄偺偐丠側傫偐擄偟偦偆偩偧丠偲巚偭偰挷傋偰傒傞偲丄俀師娭悢偐傜傕夝偗傞傒偨偄偩偗偳丄墌拞怱傪捠傞捈慄偲捈岎偡傞慄傪巊偭偨曽朄偑億僺儏儔乕傜偟偄丅丂偙傫側偺妛峑偱傗偭偨偭偗側偀丠丠
娙扨偲巚偭偰偨娭悢偑堄奜偲偰偙偢偭偰帪娫傪怘偭偰偟傑偭偨丅偪傚偭偲媥宔偟偰偐傜懕偒偵拝庤丅
崱擔拞偵慡恎斉偺娭愡晧壸寁嶼傪廔傢傜偣偨偄側偀丅
仭俈寧俉擔仭
崱擔拞偵慡恎斉偺娭愡晧壸寁嶼傪廔傢傜偣偨偄側偀丅丂側乕傫偰尵偭偰偨偗偳丄傑偩偱偒偰側偄丅丂偡偭偐傝偲僗儘乕儁乕僗偵側偭偰偟傑偄傑偟偨丅
摿偵崢偺僒乕儃偼娫堘偆偲懄僒乕儃從偗偭偰怱攝偑偁傞偺偱丄幚婡偱摦偐偡慜偵廫暘専徹偟側偄偲晐偔偰摦偐偣側偄偱偄傑偡丅(^_^;)
偱傕丄摦偐偣偽偡偖敾傞偺偑丄悢抣偩偲偙傫偑傜偑偭偪傖偭偰傢偐傫側偄傫偩傛側乕丅丂奜偟偰摦偐偣偽偄偄傫偩偗偳偹丅
丂
榬偺媡僉僱偺幚憰偵擸傒拞丅丂儔儉僟丒儅乕僉儏儕乕偺榬偺幉峔憿偑堄奜偲僋僙儌僲偱丄庤愭妏搙偵傛偭偰偼夝愅偱偒側偄働乕僗偑懡偡偓傞丅側傫偐巊偄偵偔偄側丅偦傟偲丄儅乕僉儏儕乕媟偼丄嵍塃懳徧偱偼側偔丄婎杮揑偵摨偠懌偑丄2杮暲傫偱偄傞宍側偺偱丄媡僉僱傕嵍塃懳徧偱偼側偔丄摨偠娭悢傪摨偠嵗昗宯偱巊偆偙偲偑偱偒偨丅
榬偼嵍塃懳徧偲側傝丄幉峔憿乮幉偺嬌惈偭偰偺偐側乯偑堘偆偺偱媡僉僱娭悢傕懳徾宍傪梡堄偡傋偒偐丄嵗昗宯傪斀揮偝偣傞偐丄丂偱偒傟偽懌偲摨偠峔惉偵偟偨偄偺偱摨偠嵗昗宯傪巊偄偨偄偺偩偑丅丅
仭俈寧侾俀擔仭
偙偙傫偲偙丄僂傿乕僋僨乕偼傎偲傫偳儘儃僢僩奐敪偵帪娫傪庢傞帠偑偱偒偰偄傑偣傫丅
偝傜偵偝傜偵廡枛巇帠偑廔傢傜側偐偭偨偺偱丄乽偱偒傫偺偐両乿偺懪偪忋偘慜偵夛幮偵峴偭偰堦巇帠丅丂偣偭偐偔偩偐傜偪傚偭偲攦偄暔偵峴偭偨傝偟偨傝偱丄搚梛擔偼儘儃僢僩奐敪偼偍媥傒丅
崱擔偺擔梛擔偑儘儃僢僩僨乕偵側傝傑偡丅丂儘儃僢僩僨乕偭偰尵偭偰傕僷僜僐儞偵岦偐偭偰僾儘僌儔儉慻傓偭偰偙偲側傫偩偗偳偹丅
丂
傗偭偲慡恎偺幙揰偲僒乕儃妏搙傪斀塮偟偨曕峴僨乕僞傪惗惉偡傞偙偲偑偱偒傑偟偨丅
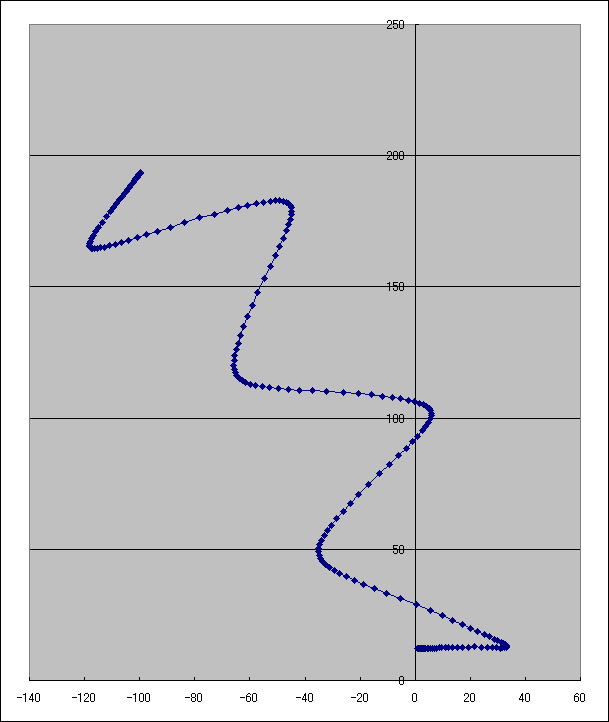
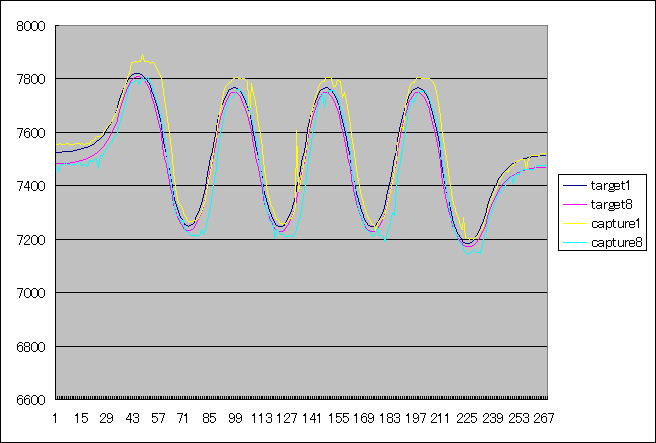
仾偙傟偼堦婥偵俆曕暘偺僨乕僞傪惗惉偟偨帪偺廳怱揰婳摴偱偡丅偮偓偼偓偠傖側偄偺偱宲偓栚偑偁傝傑偣傫丅丂懌娫妘偼80mm側偺偱丄廳怱揰偼巟帩媟傪墇偊側偄傛偆偵側偭偰傑偡偹丅傛偐偭偨傛偐偭偨丅丂
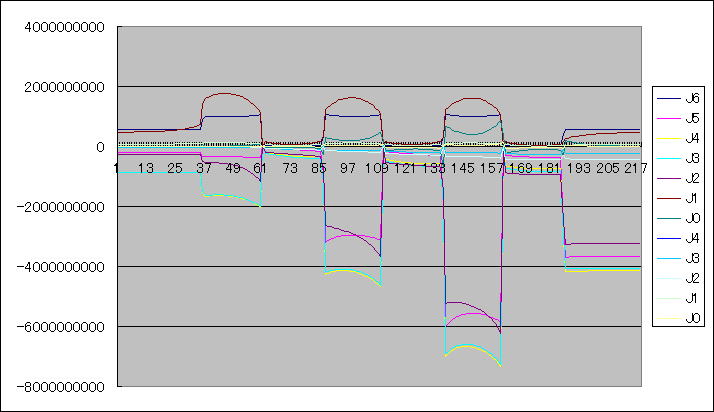
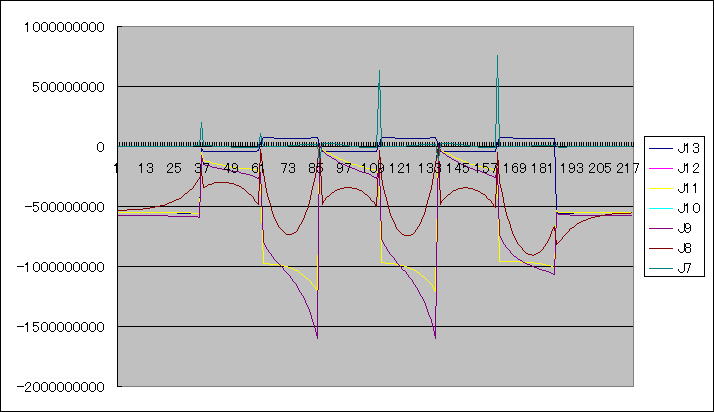
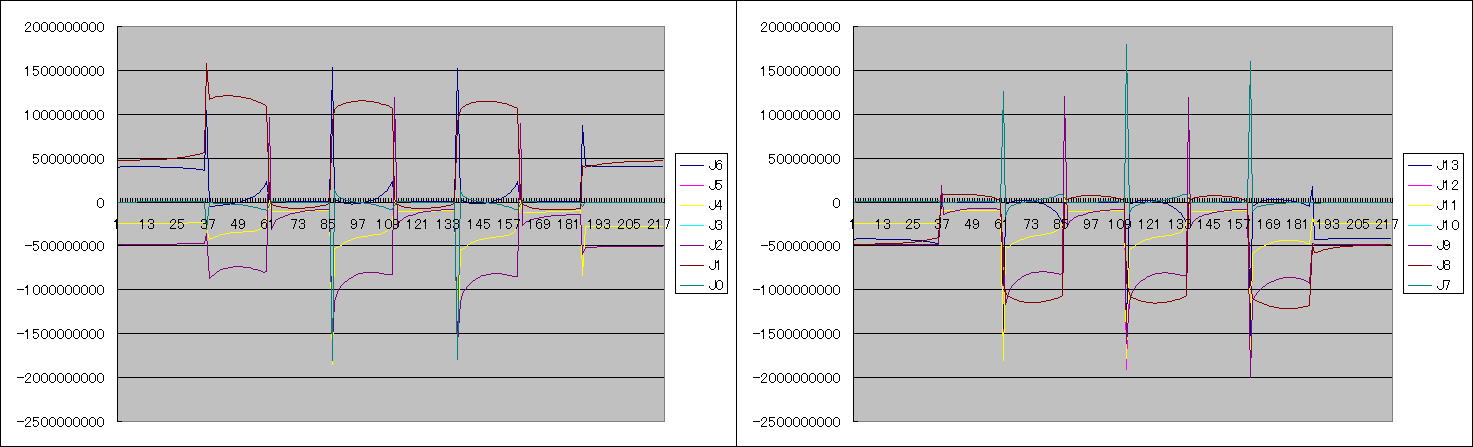
伀偦偟偰偙傟偑慡恎斉偺娭愡晧壸僨乕僞丅丂榬偺僨乕僞傕寁嶼偟偰偄傞偺偩偑丄堄枴側偄偺偱彍奜丅
俈寧俆擔偺僨乕僞偲斾傋傞偲丄屢娭愡僺僢僠乮J1拑怓乯偑侾丏俁攞偔傜偄偵側偭偰偄傑偡丅丂廳検偑攞嬤偔側偭偰傞偺偱偙傟偔傜偄偺堘偄偑弌傞傫偱偟傚偆偹丅丂揔愗側寁嶼寢壥側偺偐偳偆偐偝偭傁傝傢偐傝傑偣傫偑丄媡揮偟偰偄側偄揰偱偼崌偭偰偄傞壜擻惈崅偄偱偡丅
偪側傒偵丄杴椺偵摨偠娭愡柤偑俀夞弌偰偒偰偄傑偡偑丄儕儞僋懁偺幙揰寁嶼梡偵惗惉偝傟傞僔儍僪乕偺傛偆側傕偺丅摿偵J0,J1偺傛偆偵儕儞僋偵側偭偰偄側偄晹暘偼儕儞僋懁偺幙揰傪寁嶼偡傞偨傔偩偗偺僨乕僞偱寢壥偲偟偰傒傞偲偒偼堄枴偑偁傝傑偣傫丅乮寁嶼搑拞偱巊偆乯
幙揰寁嶼偵巊偆僒乕儃偼慡晹偱俀俁屄偁傞偺偱偡偑丄崱偼忋敿恎僒乕儃偼屌掕偺傑傑偱偡丅側偺偱偪傚偭偲僘儖傪偟偰丄幙揰寁嶼偱偼妏搙楍偠傖側偔偰屌掕抣偱寁嶼偟偰偄傞忬懺偱偡丅丂榬傪怳偭偰曕偔側偳偺墳梡偑弌棃側偄忬懺側偺偱丄偄偢傟嬤偄偆偪偵奼挘偡傞昁梫偑偁傝傑偡丅丂偼偠傔偐傜慡僒乕儃懳墳偱僾儘僌儔儉偟偰偍偄偰傕傛偐偭偨側丅
丂
偙側偄偩偺楙廗夛偱丄傄偟偄偝傫偑儘儃巕傪曕偐偣傞偆傫偸傫偱媍榑偟偰偨傝丄偦偺傎偐彅乆偺偙偲傕偁偭偰丄帗宍偺儘儃僢僩傪嶌傝偨偄偲偄偆婥帩偪偑崅傑偭偰偄傑偡丅丂僥乕儅偼旼傪怢偽偟偨曕峴偲偄偆偙偲偱曅懌俇帺桼搙偱偼側偔俈帺桼搙偐丄俈丏俆帺桼搙偔傜偄傪梌偊傞偙偲偱彈惈揑側曕峴傪偝偣偰傒偨偄偲偄偆傕偺偱偡丅
側傫偲偐拝庤偱偒側偄偐側乕丅崱傗偭偰傞儔儉僟丒儅乕僉儏儕乕偑宍偵側偭偨傜丄儔儉僟傪夵廋偟偰偭偰巚偭偰偨偗偳偦傟偼巭傔偰帗宍偵憱傠偆偐側丅丂儔儉僟丄僔僌儅丄偲偒偨偐傜帗宍偼僔乕僞偐側乕(^_^;)
仭俈寧侾俀擔偦偺俀仭

忋敿恎偮偗偰曕偐偣偰傒傑偟偨丅丂婄偼偙偗傞偲夡傟傞偺偱奜偟偨忬懺偱丅
捈恑偼傑偀側傫偲側偔曕偔偗偳丄僇乕僽曕峴偼慡慠偩傔偩側乕丅廳怱偑堏偭偰側偄姶偠側偺偱曗惓傪偐偗偨傜夵慞偡傞偺偐旝柇丅
偦傟傛傝傕exception偑栤戣丅丂側偤偐僇乕僽曕峴偺曽偑敪惗偟偵偔偄孹岦偼偁傞偗偳丄偳偭偪偵偟偰傕幚梡偵抣偟側偄丅丂敪惗偡傞応強傕條乆側偺偱丄妱傝崬傒僞僀儈儞僌偺栤戣偺壜擻惈偼戝偒偄偭偰偙偲偱丄僞僀儅乕妱傝崬傒傪巭傔偰傒偨丅丂偦偟偰丄寁嶼偩偗傪柍尷儖乕僾偱幚峴偝偣傞偲丄栤戣偼敪惗偟傑偣傫丅乮侾暘偔傜偄偟偐夞偟偰傑偣傫偗偳乯
妱傝崬傒偱偺張棟偑栤戣側傫偩側乕丅丂僞僀儅乕妱傝崬傒偑偁傞偲丄僒乕儃偺摦嶌偵娭傢傜偢栤戣敪惗偟傑偡丅丂傑偩丄妱傝崬傒張棟偱偼怓乆偲嵶偐側張棟傪幚峴偟偰偄傞忬懺側偺偱丄捈愙栤戣偵娭梌偟偰偄傞張棟偼側偵側偺偐傪嵶偐偔愗傝暘偗偰傒傑偡丅丂傑偝偐丄妱傝崬傒敪惗帺懱偑栤戣偭偰偙偲偼側偄偩傠偆側偀丅
仭俈寧侾俈擔仭
傑偝偐偺帠偑婲偙偭偰偟傑偄傑偟偨丅
妱傝崬傒帺懱偑栤戣偺傛偆偱丄儊僀儞儖乕僾偱寁嶼偝偣偰丄僞僀儅乕妱傝崬傒傪偐偗傞偲exception偑敪惗偟傑偡丅妱傝崬傒張棟偱偼幚峴揑側張棟偼堦愗側偟偱丄妱傝崬傒僐儞僩儘乕儔偺張棟傪峴偭偰偄傞偩偗丅丂敪惗帪偺儊僢僙乕僕忣曬偐傜偩偲丄悢抣墘嶼娭悢 k_sin( )偲偐k_cos( ) 偲偐偱敪惗偟偰偄傞傛偆偱偡丅丂偦偟偰丄捠忢偺僐儅儞僪懸偪張棟偩偗側傜僞僀儅乕妱傝崬傒傪敪惗偝偣偰傕偍偐偟偔側傞偙偲偼偁傝傑偣傫丅丂丄丄傕偟偐偟偨傜晜摦彫悢揰儐僯僢僩偑摦偄偰偄傞帪偵妱傝崬傒偑敪惗偡傞偲偍偐偟偔側傞偲偐丠丂傕偟偦偆側傜偳偆偟傛偆傕側偄偱偡丅丂乮丂偦傫側偙偲偭偰偁傞傫偐側丠丠丠乯
偄傑傑偱偼妱傝崬傒儖乕僠儞偵嫃傞帪娫傪偱偒傞偩偗抁偔偡傞傛偆偵張棟傪峫偊偰偒偨偗傟偳丄妱傝崬傒儖乕僠儞偱慡偰傪張棟偡傞傛偆偵偟偰丄悢抣墘嶼傪偡傞傛偆側張棟偼妱傝崬傒撪偱峴偆傛偆偵偟側偗傟偽側傝傑偣傫丅
偱偼偲丄ZMP婯斖偺曕峴惗惉張棟偵偳傟偔傜偄帪娫偑偐偐偭偰偄傞偺偐傪應掕偟偰傒傑偟偨丅
僞僀儅乕妱傝崬傒偺僇僂儞僞乕傪巊偭偰寁應偡傞偲丄丂戝懱71ms偔傜偄偱偡偹丅丂寁嶼検偑懡偄僇乕僽曕峴偱丄弶婜偺1曕偺曽偑寁嶼検偑戝偒偄偺偱偙傟偑嵟戝偐丅
妱傝崬傒廃婜傪80ms偲偐偵怢偽偡傢偗偵峴偐側偄偺偱丄惗惉儖乕僠儞傪4暘妱偔傜偄偵偟偰4夞偺妱傝崬傒偱張棟偡傟偽偱偒傞偐傕丅丂斾妑揑偦偆偄偆峔憿偵偱偒傗偡偄僾儘僌儔儉側偺偱側傫偲偐側傝偦偆丅
偁丄丂SEMB偺曽偱偼傑偩娭愡晧壸寁嶼傪傗偭偰側偐偭偨丅丂偝偡偑偵80ms偼挻偊側偄偩傠偆偗偳丄80ms偵嬤偔側傝偦偆偱偡丅寢峔側寁嶼検偩側丅
傕偟偙傟偱偆傑偔峴偭偨偲偟偰傕丄寁嶼検偑憹偊傞偨傃偵張棟帪娫偵偮偄偰婥偵偟懕偗偹偽側傜側偄丅丂偦偆偄偆僞僀僾偺僔僗僥儉偼偁傫傑傝岲偒偠傖側偄丅
儊僀儞儖乕僾偱傗傝偨偄側偀(>_<)
仭俈寧侾俉擔仭
擔帍傪撉傫偱偔傟偰偄偨壀揷偝傫偐傜傾僪僶僀僗傪傕傜偄丄晜摦彫悢揰曄悢傪偡傋偰float偐傜double偵曄峏偟傑偟偨丅
SEMB1200A偺FPU偼double偱寁嶼偟偰偄傞偺偱float偱寁嶼偡傞偲double偵曄姺偟偰偐傜寁嶼偡傞偺偱抶偔側傞偦偆偱偡丅丂偡傋偰偺晜摦彫悢揰曄悢傪double偵偡傞偙偲偱丄墘嶼帪娫偼71.5ms偐傜68ms偵弅傑傝傑偟偨丅
偱偡偑丄埶慠偲偟偰晄掕婜偵exception偑敪惗偟傑偡丅
偙偺墘嶼傪妱傝崬傒儖乕僠儞懁偱峴偆傋偔専摙偟偰偄偨偺偱偡偑丄20ms偺偆偪偵丄4夞偺僒乕儃傊偺僨乕僞憲弌偲僨乕僞庴怣偑偁傝傑偡丅丂憲怣偲庴怣偺娫偵偼1ms偔傜偄娫傪嬻偗偰偄傞偺偱丄20ms偺巆傝帪娫偼10ms偔傜偄偱偡丅側偺偱丄10ms枹枮偵張棟傪嬫愗傜側偗傟偽側傝傑偣傫丅
娙扨側偲偙傠偱丄嬫愗偭偰傒傑偟偨偑丄懡幙揰儌僨儖偐傜偺ZMP摫弌偺張棟偵30ms掱搙偐偐偭偰偄傞偨傔丄傕偭偲嵶暘壔偡傞偵偼偙偺ZMP偺摫弌傪悢夞偵嬫愗傜側偗傟偽側傝傑偣傫丅丂寢峔戝巇帠偵側偭偰偟傑偭偨丅偁傫傑傝嵶愗傟偵側傞偲丄寁嶼偑娫偵崌傢側偔側傞偐傕偟傟側偄偺偱偝偠壛尭偑擄偟偄偐傕抦傟側偄偱偡丅
側偵傛傝丄曕峴廃婜偑憗偔側傞偲寁嶼偱偒側偔側傞壜擻惈傕偁傞偺偱傗偭傁傝柺敀偔側偄丅丂偆偅傓丄丄崲偭偨丅
丂
柧擔偼傢傫偩傎乕丅丂崱夞偼巆擮側偑傜弌応偱偒側偄偺偱尒妛偱偡丅丂偁傢傛偔偽帩偭偰偄偙偆偲偟偰偄偨帺暘偑偙偭偗偄偱偡orz丅丅丅
仭俈寧俀俀擔仭
傢傫偩傎乕偺師偺擔偐傜3擔娫丄壆媣搰傊奆婛擔怘傪娤偵峴偭偰偒傑偟偨丅丂僯儏乕僗偱傕傗偭偰偨偲巚偆傫偱偡偑丄娤傟側偐偭偨傫偱偡偗偳偹丅丅丅(>_<)
壆媣搰傑偱峴偭偨偺偵丄撽暥悪傪尒傞偙偲傕偱偒偢偵偡偛偡偛偲栠偭偰偒傑偟偨丅(^_^;)
偱傕丄奆婛堟偱偟偐懱尡偱偒側偄奆婛擔怘帪偺埫偝傪枴傢偊傑偟偨丅丂傕偺偡偛偔媫寖偵埫偔側偭偰丄傑偨媫寖偵柧傞偔側偭偰峴偔傫偱偡偹丅師偼奆婛擔怘傪尒偨偄側偀丅
 丂丂仼偙傫側姶偠偐傜丄
丂丂仼偙傫側姶偠偐傜丄
 丂丂仼媫寖偵偙傫側姶偠偵埫偔丅丅丂峣傝慡奐偱嶣塭丅
丂丂仼媫寖偵偙傫側姶偠偵埫偔丅丅丂峣傝慡奐偱嶣塭丅
 丂丂仼斵曽偼奆婛堟偠傖側偄偺偱柧傞偄傫偱偡偹丅
丂丂仼斵曽偼奆婛堟偠傖側偄偺偱柧傞偄傫偱偡偹丅
擔怘僣傾乕偺慜擔偼傢傫偩傎乕偱偟偨丅丂偲尵偭偰傕僀僠尒妛幰側偺偱婥寉側姶偠偱僽儔僽儔偟偰傑偟偨丅
 丂丂僥儗僐儉僙儞僞乕偺揥朷戜偐傜嶣偭偨僈儞僟儉丅丂懌尦偑尒偊側偄乣(>_<)
丂丂僥儗僐儉僙儞僞乕偺揥朷戜偐傜嶣偭偨僈儞僟儉丅丂懌尦偑尒偊側偄乣(>_<)
 丂僥儗僐儉僙儞僞乕偺揥朷戜偐傜尒偊偨擑丅丂傛偔娤傞偲擇廳偵側偭偰偄傞丅
丂僥儗僐儉僙儞僞乕偺揥朷戜偐傜尒偊偨擑丅丂傛偔娤傞偲擇廳偵側偭偰偄傞丅
 丂丂偦偟偰丄栭宨偵塰偊傞棾婼嘦
丂丂偦偟偰丄栭宨偵塰偊傞棾婼嘦
 丂丂僪僇丂偡偘偉
丂丂僪僇丂偡偘偉
丂
儔儉僟偺曽偼偦傫側傢偗偱恑揥偁傝傑偣傫丅丂壀揷偝傫偵怓乆偲傾僪僶僀僗傪偄偨偩偄偰偄傞偺偱偡偑丄偳偆傗傜偆偪偺娐嫬偲壀揷偝傫偺娐嫬偱偼寢壥偑堎側傞傛偆偱偡丅丂偆偪偺娐嫬偼sugi3偺儂乕儉儁乕僕偐傜僟僂儞儘乕僪偟偰偒偰揥奐偟偨偩偗偺娐嫬側偺偱壗偑側傫偩偐傢偐傜傫偺偱丄壀揷偝傫偺HP偵宖嵹偝傟偰偄傞庤弴偱峔抸偟偰傒傞偙偲偵偟傑偟偨丅丂gcc 4.1.2偱峔抸偱偡丅丂偄傑丄newlib偺make偱僄儔乕偑丅丂崱栭拞偵恑揥偁傞偐側乕丅
仭俈寧俀俆擔仭
埬偺掕偳偭傉傝偲怹偐偭偰偟傑偭偨椺奜栤戣偱偡偑丄壀揷偝傫偺嫮椡側僒億乕僩偺偍偐偘偱彮偟岝柧偑尒偊偰偒傑偟偨丅
傑偢偼丄摨偠僜乕僗偱傕偆偪偲壀揷偝傫偱偼栤戣偺敪惗偺巇曽偑堎側傞偲偄偆偙偲偩偭偨偺偱丄壀揷偝傫偺HP偺婰弎偵廬偭偰娐嫬傪嵞峔抸偟傑偟偨丅丂偦偺寢壥丄儊儌儕乕娭楢偱偼壀揷偝傫偲摨偠寢壥偑尒偊偨偺偱偡偑丄晜摦彫悢揰墘嶼偼傑偭偨偔弌棃側偔側偭偰偟傑偄傑偟偨丅丂側偵傗偭偰傕exception偱巭傑偭偰偟傑偆丅丂偦偺屻怓乆偲帋偟偨偺偱偡偑丄傑偭偨偔曄壔偑側偐偭偨偺偱丄寢嬊偼cygwin傑偱嵞僀儞僗僩乕儖丄偦傟傕奐敪娐嫬偼僼儖僀儞僗僩乕儖偟偰丄僋儘僗僐儞僷僀儔娐嫬傪嵞峔抸偟傑偟偨丅丂
偦偙傊壀揷偝傫偐傜儊乕儖偺堦曬偑撏偒丄sprintf( )偑埆偄塭嬁傪媦傏偟偰偄傞傛偆偩丄偲偄偆忣曬傪傕傜偄傑偟偰丄傗偭偲壀揷偝傫偲尒偊偰偄傞傕偺偑堦弿偵側傝傑偟偨丅
semb1200a偺僾儘僌儔儉偱偼printf( )暥偑巊偊側偄偺偱丄僨僶僢僌梡偵偁偪偙偪偵sprintf( )偱妋擣偟偨偄曄悢抣傪暥帤楍偵偟偰僐儞僜乕儖偵昞帵偝偣偰偄傑偡丅偦傟傪偡傋偰攔彍偟側偗傟偽側傝傑偣傫丅丂儔僀僽儔儕偵傕float傗double傪悢抣昞帵偡傞娭悢偼梡堄偝傟偰偄側偄傛偆側偺偱丄偙傟偼嶌傜側偒傖側傜側偄偱偡偹丅
傑偢偼丄僜乕僗偐傜慡偰sprintf傪嶍彍偟偰偪傖傫偲摦偔偺偐傪妋擣偟偰傒傑偟傚偆丅懠偵傕栤戣偁傞偐傕偟傟側偄偱偡偐傜偹丅
岝柧偑尒偊偰尦婥偵側偭偰偒傑偟偨丅
丂
make懸偪偱偁偪偙偪偺僽儘僌尒偰偄偨傜丄晛捠偺夛幮堳偺惣偝傫偐傜儔僀僶儖愰尵偑両丂偄傗偄傗偦傫側傕偭偨偄側偄丅偲偄偆傛傝丄儔僀僶儖偠傖側偔偰乽摨巙乿偵偟傑偟傚偆傛丅儔僀僶儖偩偲忣曬岎姺偱偒側偝偦偆側傫偱(^丒^)
仭俈寧俀俇擔仭
傑偩偩傔偱偡丅
怴偟偄娐嫬偱傕丄慜偺娐嫬偲摨偠徢忬偱椺奜偑敪惗偡傞傛偆偵偼側傝傑偟偨丅丂傕偆偩傫偩傫偲偙偺栤戣傪夝寛偡傞偺偑庡栚揑偵側偭偰偒偰偟傑偭偨傛偆偱丄ZMP寁嶼偺婰弎傪傒偰傕側偵傪傗偭偰傞偺偐朰傟偐偗偰偒傑偟偨丅(^^乁丂丂僶僢僼傽偑彮側偄側偀丅丅丅
偪傚偭偲慜傑偱偼乽栚揑偼儘儃僢僩僾儘僌儔儉側偺偩偐傜丄昁梫側婡擻偑摦偗偽庤抜偼丅丅乿偲峫偊偰偄偨偺偩偗傟偳丄傕偆丄偩傫偩傫偲暿偺庤抜傪慖傇偺偑乽摝偘乿偵巚偊偰偒偰偟傑偭偰偪傚偭偲傑偢偄偱偡偹丅丂惓捈丄妱傝崬傒儖乕僠儞懁偱ZMP寁嶼傪僉僠儞偲廔傢傜偣傞偺偼憡摉傔傫偳偔偝偄張棟側偺偱傗傝偨偔側偄偭偰偺傕偁傝傑偡偑丅
仭俈寧俁侾擔仭
傗傝傑偟偨丅丂偲偆偲偆exception栤戣偑夝寛偟傑偟偨丅
29擔偵僥僗僩僾儘僌儔儉偲専摙梡偵夵憿偟偨儘儃僢僩僾儘僌儔儉偱摦嶌傪妋擣偟丄愭傎偳妱傝崬傒偱僒乕儃傪摦偐偟側偑傜偺摦嶌妋擣偱偳偆傗傜exception偼敪惗偟側偄傛偆偱偡丅
寢壥偲偟偰偼gcc4.1.2偱丄僐儞僷僀儖僆僾僔儑儞偱-O傪偮偗傞偙偲偱栤戣偼敪惗偟側偔側傝傑偟偨丅傾僪僶僀僗傪偄偨偩偄偨壀揷偝傫丄Zak偝傫偁傝偑偲偆偛偞偄傑偟偨丅丂偱傕丄側偤嵟揔壔僆僾僔儑儞傪偮偗傟偽偆傑偔偄偔偺偐偼傢偐傝傑偣傫丅
gcc傪4.1.2偵擖傟懼偊偨傝偟偰丄sprintf()傪巊傢側偄傛偆偵偟偨帪揰偱sugi3偺偲偙傠偐傜DL偟偰偒偨奐敪僉僢僩偱偺忬懺偲傎傏堦弿偵側傝傑偟偨丅偦偟偰嵟揔壔偡傟偽夝寛偟偨傢偗偩偐傜丄sugi3偺娐嫬乮gcc3.4.4)偱丄嵟揔壔偡傟偽sprintf( )傕巊偊傞傛偆偵側傞偺偐傕偟傟傑偣傫丅丂帋偟偰傒傛偆偐側丅丅丅
嵟揔壔僆僾僔儑儞傪偮偗偨応崌偺僐儞僷僀儖寢壥傪斾傋偰傒傛偆偐偲巚偭偰丄
main( )
double a;
{
丂while(1){
丂丂a = sin(1000);
丂}
}
偲尵偭偨姶偠偺僾儘僌儔儉傪嶌偭偰傒偨偺偱偡偑丄偙傟偱嵟揔壔僆僾僔儑儞傪偮偗偰僐儞僷僀儖偡傞偲偨偩偺嬻偺柍尷儖乕僾偑弌棃偰偟傑偭偰斾傋傛偆偑偁傝傑偣傫偱偟偨丅丂偦偺寢壥傪尒偰丄傕偟偐偟偰儔儉僟偺僾儘僌儔儉傪嵟揔壔偟偨応崌傕壗傕偟側偄傛偆偵側偭偰偨偨傔偵椺奜偑敪惗偟側偔側偭偨偺側傜偽偊傜偄偙偭偪傖両偲巚偭偰媫偄偱摦嶌妋擣偟傑偟偨丅丂摦偄偰傛偐偭偨(^_^;)
娫偵椃峴偵峴偭偨傝丄巇帠偑朲偟偐偭偨傝丄堸傒夛偑懡偐偭偨傝偟偨偺偩偗傟偳丄7寧12擔偐傜2廡娫埲忋偼偙偺栤戣偵偳偭傉傝偲怹偐偭偰偨偙偲偵側傝傑偡丅挿偐偭偨丅丅丂柧擔偐傜傗偭偲儘儃僢僩奐敪偵庢傝慻傔傑偡丅
仭俉寧俀擔仭
偲傝偁偊偢弴挷偵摦偄偰偄傑偡丅丂傛偐偭偨乣丅
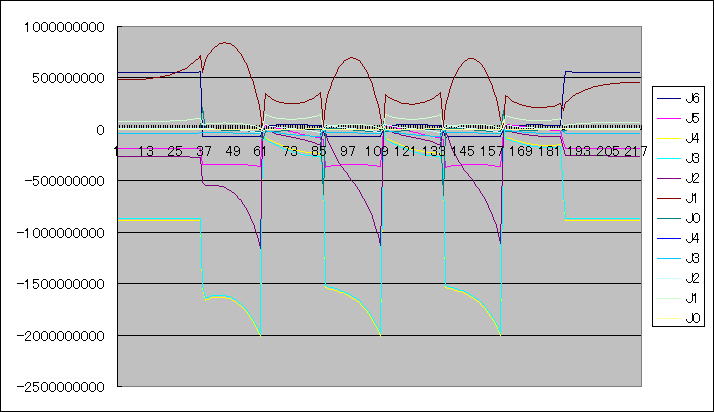
僇乕僽曕峴偱娭愡幉偺晧壸傪寁嶼偝偣偰傒傞偲丄曕悢偑憹偊傞傎偳偵晧壸偑憹偊偰偄偭偰偄傞丅丂偦傫側偙偲偼側偄偺偱寁嶼偵娫堘偄偑偁傝傑偡偹乕丅巔惃曄姺傪偆傑偔庢傝偙傔傜傟偰偄側偄偺偐丠扨側傞曄悢偺僋儕傾朰傟乮憹壛堦曈搢偱偼側偄偺偱堘偆偲巚偆偑乯側偺偐丠
偲傝偁偊偢偼丄僇乕僽曕峴惗惉偺擇師尦偵揥奐偟偨曕峴惗惉偺僾儘僌儔儉婰弎傗丄堷宲偓曕峴偺堷宲偓曽朄側偳傪捈恑僞僀僾偵傕斀塮偝偣偰偐傜偵偟傑偡丅
姶妎偲偟偰偼慡恎僞僀僾偩偲曕偐偣傞偺偵傑偩傑偩嬯楯偟偦偆側婥攝偱偡丅
仭俉寧俆擔仭
僇乕僽曕峴偱偺傾儖僑儕僘儉傪捈恑曕峴偵傕揔梡偟傑偟偨丅丂偲偙傠偑丄傑偨傑偨僐儞僷僀儔偺栤戣丠傜偟偄傕偺偵憳嬾丅
悢抣寁嶼晹暘偺僨僶僢僌偼丄SEMB偵揮憲偣偢丄PC忋偱僾儘僌儔儉傪摦偐偟偰悢抣傪儘僌偵庢偭偰専徹偟偰偄傑偡丅丂SEMB偺exception憶偓偱丄float傪偡傋偰double偵抲偒姺偊偨偺偱偡偑丄偦傟傪PC忋偱憱傜偣傞偲曄側摦偒傪偟傑偡丅
捛愓偟偰傒傞偲丄
double pace = 0.5;
double dt = 0.02;
int c = pace / dt;
偲偡傞偲丄c=25偺偼偢偑丄24偲側偭偰偟傑偆丅丂側傫偩偙傝傖乕丅偪側傒偵
int c = 0.0000000001 + pace / dt;
偲偡傞偲丄c=25偵側傝傑偡丅丂偨偟偐岆嵎偑敪惗偡傞栤戣偑偁偭偨傛偆側婥偑偡傞偑丄偙偩傢傞偲偙傠偱偼側偄偺偱丄PC忋偱偼儅僋儘偱float偵偟偰僐儞僷僀儖偡傞傛偆偵偟偰SEMB忋偱摦偐偟偨応崌偲摨偠摦偒偵側傞傛偆偵偟傑偟偨丅
偱丄偝傜偵恑傔傞偲丄崱搙偼媡僉僱曄姺偱僄儔乕偱巭傑偭偰偟傑偆丅偙傟傕exception憶偓偺帪偵寁嶼晄壜忬懺傪専弌偡傞傛偆偵婰弎傪壛偊偨偨傔偱丄儅僀僫僗抣傪儖乕僩偟偨傝丄1埲忋偺悢傪acos偟偨傝偟側偄傛偆偵僠僃僢僋偟偰偄傑偡丅
捛偄偐偗傞偲丄堷宲偓儌乕僔儑儞惗惉抜奒偱丄懡幙揰儌僨儖偱偺ZMP摫弌晹偱丄堷宲偓僼儗乕儉傪崌惉偟偰偄傞偺偩偑丄偙偙偺寁嶼寢壥偑偍偐偟偄丅
偡傞偲偳偆偟偰SEMB偱偼偪傖傫偲摦偄偰偄偨偺偐丠丂偲巚偭偨偑丄SEMB忋偱偼崢崅偝傪230mm偵偟偰摦偐偟偰偄傞偺偵懳偟偰PC僨僶僢僌娐嫬偱偼270mm偲懌傪怢偽偟偨巔惃偲側偭偰偄偨丅丂偦偺偨傔丄偪傚偭偲柍棟傔側巔惃偱傕偪傖傫偲媡僉僱偱偒偰偄偨偺偱偟偨丅
偍乕丄堄奜側偲偙傠偱僶僌捛偄弌偟偑弌棃偨側偲丄偄偄傛偆偵庢偭偰傒偨偺偩偑丄2廡娫偺僽儔儞僋偺偨傔僾儘僌儔儉偑撉傔側偄(^_^;)丂2廡娫慜偺帺暘偼婛偵懠恖偲側偭偰偍傝傑偟偨丅僐儊儞僩偄偭傁偄擖傟偰傞偮傕傝偩偗偳傑偩傑偩懌傝側偄傛偆偱偡丅
偲偄偆傢偗偱丄1曕恑傫偱2曕壓偑偭偰偍傝傑偡(^^乁
仭俉寧俋擔仭
庍慠偲偟側偄傑傑嶌嬈傪恑傔偰偄傑偡丅
傑偢丄堷宲偓儌乕僔儑儞惗惉抜奒偱嶌惉偡傞堷宲偓僼儗乕儉偺崌惉偵偮偄偰偼僨僶僢僌姰椆丅丂偍偐偟側巔惃傪惗惉偡傞僶僌偼夝徚偟傑偟偨丅
偦偟偰丄僇乕僽曕峴惗惉偱嶌惉偟偨ZMP婯斖偺曕峴惗惉儖乕僠儞傪捈恑曕峴惗惉偵傕揔梡偡傞偙偲偑偱偒傑偟偨丅堦杮壔偼偁傑傝堄枴偑側偄偲偟偰尒憲傝丅
師偵娭愡晧壸嶼弌儖乕僠儞偺僨僶僢僌偱偡丅捈恑偱傕傗偼傝曕偔傎偳偵晧壸偑憹偊偰偄偭偰偟傑偆丅丂僾儘僌儔儉傪僩儗乕僗偟偰寁嶼幃傪妋擣偟偨偲偙傠偄偔偮偐偺僶僌傪尒偮偗偼偟偨偺偩偗偳丄寁嶼寢壥偵戝偒側嵎偑惗偠傞傕偺偱偼偁傝傑偣傫偱偟偨丅
仾儘乕儖幉偼栤戣側偄偑丄僺僢僠幉偼曕偔傎偳偵晧壸偑憹偊偰偄傞丅寁嶼偑偍偐偟偄偭偰偙偭偰偡丅
偳偆峫偊偰傕夦偟偄偺偼嬻娫懍搙丒嬻娫壛懍搙偺晹暘丅儘儃僢僩偼曕偄偰峴偭偰傞偺偵寁嶼忋偺尨揰偼曕偒巒傔偺嬻娫尨揰傪巊偭偰寁嶼偟傑偡丅丂側偵傛傝嬻娫懍搙丒嬻娫壛懍搙偺峫偊曽偑僀儅僀僠棟夝偱偒偰偄側偄偺偑恏偄丅
偦偙偱丄寁嶼忋偺尨揰偺峫偊曽傪曄偊偰傒傞偙偲偵偟傑偟偨丅懡幙揰儌僨儖偱偺ZMP摫弌偱偼尨揰傪堏摦偝偣傞偲寁嶼寢壥偑偔傞偭偰偟傑偄傑偡偑丄娭愡晧壸寁嶼偱偼幙揰偺堏摦懍搙丒壛懍搙偼寁嶼偵巊梡偟傑偣傫丅傑偨丄娭愡幉巔惃偺曄壔懍搙丒壛懍搙傕寁嶼偟側偄偺偱丄尨揰偑摦偔偙偲偼捈愙栤戣側偄偼偢偱偡丅
偁傑傝棟夝偱偒偰偄側偄嬻娫懍搙偺峫偊曽傪塋撣傒偡傟偽丄尨揰偑曄傢偭偰傕塭嬁側偄偼偢偩偲巚偭偰妋偐傔偰傒傑偟偨丅
偙傟偼奺幙揰偺嬻娫懍搙偺Y幉梫慺偱偡丅尨揰傪曕偒巒傔偺嬻娫尨揰偲偟偨傕偺偲丄栚昗ZMP偲偟偨応崌偵堘偄偼偁傝傑偣傫偱偟偨丅
偱偁傞偲偡傟偽丄娭愡晧壸偺寁嶼偵巊梡偡傞抣慡偰傪栚昗ZMP偵偡傟偽椙偄偺偱偼偲丄寁嶼偟偰傒偨偺偑偙傟伀
幉懌偑曄傢傞弖娫丄偮傑傝ZMP偑堏摦偡傞弖娫偺娭愡晧壸偑傎傏慡娭愡偲傕0偲側偭偰偄傞偺偑偍偐偟偄偱偡偑丄抣偑憹壛偟側偔側傝傑偟偨丅
偙偺峫偊曽偑惓偟偄偺偐偳偆偐傢偐傝傑偣傫偑丄偙傟傪僇乕僽曕峴偵傕揔梡偟偰傒傑偟偨丅
偖偪傖偖偪傖丅丅丂側乕傫偲側偔丄儘儃僢僩偑夞揮偟偰偄偭偰偄傞條巕偑寁嶼偵斀塮偝傟偰偄側偄偭傐偄姶偠偑偟傑偡丅丂傕偆堦懅丅
棃廡枛偼婣徣偟偰丄嵞棃廡偼娭搶慻儘儃僢僩楙廗夛偐偀丄丄偦傟傑偱偵夝寛偱偒傞偐側丅
丒丒丒丒丒
偢偽傝丄儘儃僢僩偺夞揮検偑斀塮偝傟偰偄傑偣傫偱偟偨丅偪傖傫偲妋擣偟偰偐傜擔帍偵彂偔傫偩偭偨丅
偙偺抣偑崌偭偰傞偺偐偳偆偐夦偟偄晹暘偼偁傞偺偱偡偑丄師偼娭愡晧壸傪儅乕僉儏儕乕媟乮儕儞僋媟乯偺摿挜偱偁傞晧壸偺暯嬒壔嶌梡傪斀塮偟偰暯嬒壔張棟傪壛偊傑偡丅
丒丒丒
儅乕僉儏儕乕媟偵崌傢偣偨曗惓傪峴偄傑偟偨丅
伀塃懌
伀嵍懌
屢娭愡儓乕幉偺僷儖僗偑側偤偐嵍懌偺曽偑戝偒偄傛偆偩偗偳丄崱偼偁傑傝捛媦偟側偄偙偲偵偟傑偡丅
偝偰丄師偼曕偐偣偰僨乕僞庢傝傪偟傑偡丅丂曗惓偺昁梫検偲僗儗僢僔儏僪儗儀儖傪寛掕偡傞昁梫偑偁傝傑偡丅
仭俉寧侾侽擔仭
曕偐偣傞慜偵傑偩傗傞偙偲偑偁傝傑偟偨丅
堷宲偓儌乕僔儑儞偺娭愡晧壸嶼弌丅丂偙傟傕丄堷宲偓儌乕僔儑儞偱偺懡幙揰儌僨儖偐傜偺ZMP摫弌偺応崌偲摨條偵堷偒宲偓僼儗乕儉傪惗惉偟偰娭愡妏搙偺懍搙丄壛懍搙傪偆傑偔堷偒宲偖傛偆偵峫偊傞昁梫偑偁傝傑偡丅
堷宲偓僼儗乕儉偺惗惉偼娭悢偵偟偰庢傝埖偊傞傛偆偵偟偰偍偄偨偺偱丄帪娫傪偐偗偢偱偒傑偟偨丅
偦偟偰娭愡晧壸偺寁嶼傪偝偣偰傒傞偲丄傑偭偨偔堷宲偓僼儗乕儉偑栶偵棫偭偰偄傑偣傫丅丂偟偽傜偔擸傫偩枛丄堷宲偓儌乕僔儑儞偺巟帩媟僨乕僞偑偍偐偟偄偙偲偵婥晅偒傑偟偨丅堷宲偓僼儗乕儉偺巟帩媟偼惓偟偄僨乕僞偩偭偨偺偱丄傑偭偨偔堷宲偓偑偆傑偔峴偭偰偄側偐偭偨傢偗偱偡丅
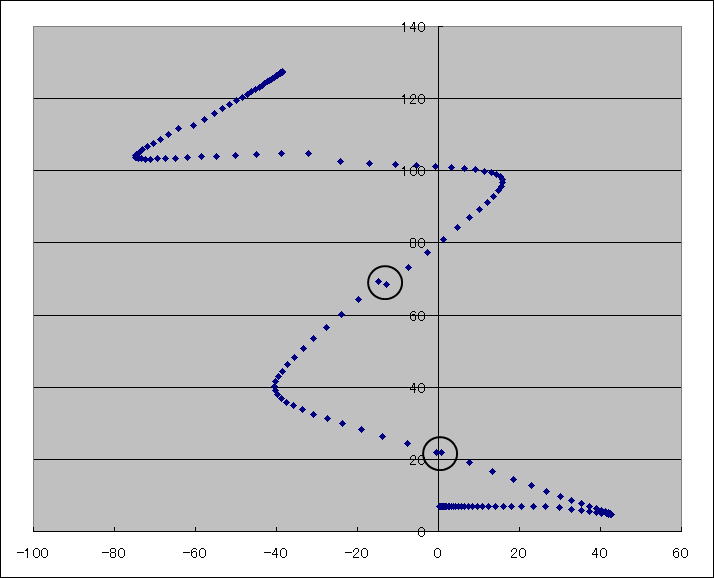
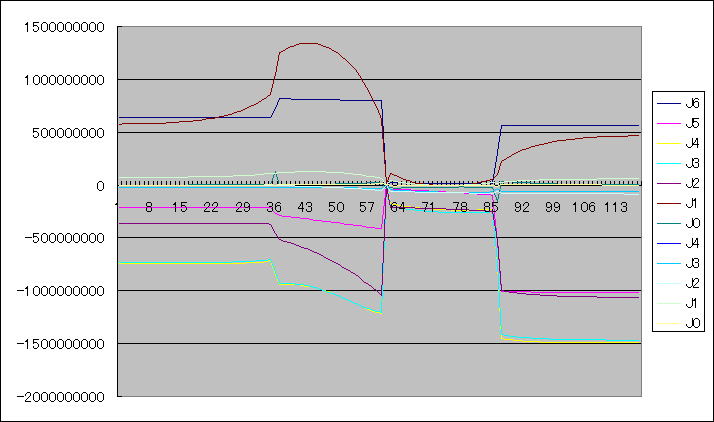
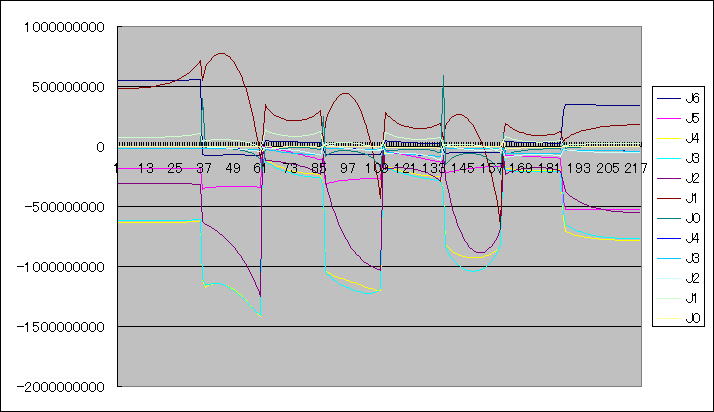
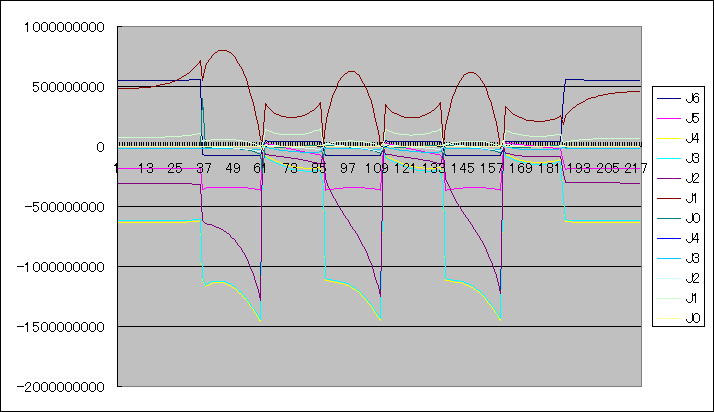
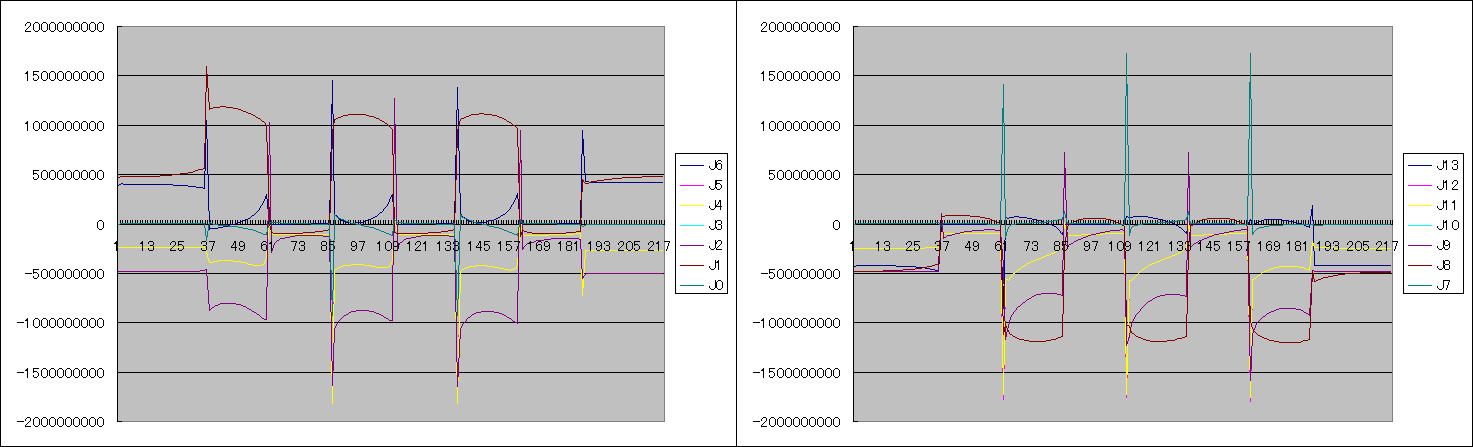
伀偙傟偑堷宲偓儌乕僔儑儞偺娭愡晧壸寁嶼寢壥偱偡丅
嶐擔偺娭愡晧壸僌儔僼偺墶幉61曈傝偐傜堷偒宲偄偱偄傑偡丅偍偐偟偔側偄僨乕僞偵側偭偰偄傞偲巚偄傑偡丅
仭俉寧侾俁擔仭
傗偭偲捈恑偲僇乕僽曕峴偑楢懕偱幚峴偱偒傞傛偆偵側傝傑偟偨乣丅丂偙偙傑偱挿偐偭偨側偀丅
捈恑曕峴傪僇乕僽曕峴偲摨偠傛偆偵俀師尦奼挘僶乕僕儑儞偵彂偒姺偊偰丄堷偒宲偓儌乕僔儑儞惗惉傑偱峴偆偙偲偑偱偒傞傛偆偵側傝傑偟偨丅丂弶婜儌乕僔儑儞偱傕堷宲偓儌乕僔儑儞偱傕娭愡晧壸偺寁嶼傑偱峴偭偰偄傑偡丅
摦嶌僥僗僩傪巒傔偨偲偒丄捈恑曕峴傪奐巒偡傞偲丄堷宲偓晹暘偱媡僉僱曄姺僄儔乕偱巭傑偭偰偟傑偄傑偡丅丂偍偭偐偟偂側偀乣偲丄偟偽傜偔僜乕僗傪挱傔偨偲偙傠丄堷宲偓儌乕僔儑儞惗惉偺俀廡栚丄偮傑傝栚昗ZMP楍偲懡幙揰儌僨儖偐傜偺ZMP摫弌抣偲偺嵎暘偐傜廳怱婳摴偺曗惓抣傪嶼弌偡傞晹暘偱僄儔乕偑弌偰偄傞偺傪撍偒巭傔傑偟偨丅
偨偟偐丄偙偙偼寁嶼寢壥偑敪嶶偡傞偐傜嵎暘抣傪嫮惂揑偵廋惓偟偨傝偟偰庤傪壛偊偨偼偢丅丅丂埬偺掕丄嵎暘抣楍偺愭摢傪嫮惂揑偵0偵偡傞晹暘偑楻傟偰偄傑偟偨丅丂傆偅丄偙傟偱OK丅
偙偆偄偆晹暘偼嫵壢彂偵偼彂偄偰偄側偔偰丄帋峴嶖岆偱尒偮偗偨婰弎偱偡丅戝帠偱偡偹丅
曕峴儌乕僔儑儞偼惗惉偱偒傞傛偆偵側偭偰丄椺奜傕敪惗偣偢偵儌乕僔儑儞嵞惗偑偱偒傞傛偆偵側傝傑偟偨丅丂偱傕丄傑偩曕偗側偄傫偱偡丅(^^乁
娭愡晧壸偺寁嶼偼峴偭偰偄傑偡偑丄偦偺寁嶼寢壥偼巊偭偰偄傑偣傫丅丂晧壸寁嶼寢壥傪娭愡偺巜帵妏搙偵斀塮偝偣傞偨傔偵尰嵼偺嵞惗惛搙傪應掕偡傞昁梫偑偁傝傑偡丅丂挿傜偔exception栤戣偱丄應掕晹暘偼僐儊儞僩傾僂僩偵偟偰偄偨偺偱偡偑丄偲偆偲偆夝嬛偺帪偑偒傑偟偨丅
偦偟偰夝嬛偟偰摦偐偡偲丄丄丄丄丂exception偱巭傑偭偪傖偄傑偟偨丅乢(仢o仢)乛丂丒丒丒丒丒丒丒尨場媶柧偟偰偄側偄偺偱丄丄僶僌偩偲巚偆傫偱偡偗偳偹丅丂偦傠偦傠帪娫側偺偱崱擔偼偙偙傑偱偱偡丅
偙偺廡枛偼幚壠偵婣徣偡傞偺偱儘儃僢僩奐敪偼偱偒傑偣傫丅丂偦偟偰梻廡枛偼楙廗夛丅丂傑偨曕偐側偄儘儃僢僩帩偭偰偐側偒傖側傜側偄偺偐側乕丅

仭俉寧侾俉擔仭
偙偺廡枛偼丄偄偮偵側偔抁偄婣徣傪偟偰偒傑偟偨丅丂嬥梛擔栭偵弌敪偟偰寧梛擔挬偵栠偭偰偒傑偟偨丅晛捠偼5擔掱搙側偺偱嬌傔偰抁偄婣徣偱偟偨丅
幵偱栭堏摦側偺偱丄嶐擔偼揙栭柧偗媥壣(^_^;)丂崅懍戙1000墌偺偍偐偘偱偙偪傜偵栠傞帪偼廰懾偽偭偐傝偱偟偰丄偄偮傕側傜俁帪偔傜偄偵偼拝偄偰傞偲偙傠偑挬偺俈帪摓拝偵側傝傑偟偨丅嶐擔偼揙栭柧偗偱傎偘乕偭偲夁偛偟偰偍傝傑偟偨丅
偄傗丄傎偘乕偳偙傠偠傖側偄丅丂僨乕僞僒乕僶偵NAS傪巊偭偰傞偺偩偑丄丂撍慠乽僺僺僺僺乿傾儔乕儉偑柭傝弌偟偰LED偑愒偔揰柵丅丂儕僽乕僩偟偰傕傾儔乕儉偑弌傞偽偐傝偱棫偪忋偑傜側偄丅丂峸擖敿擭偱夡傟傗偑偭偨丅丂傾僀僆乕僨乕僞偱偡丅(>_<)丂偦傟傪崼曪偟偰廋棟僙儞僞乕偵憲傝偮偗偨傝偟偰傑偟偨丅
僨乕僞偼丄僒乕僶偐傜峏偵僙僇儞僪僨傿僗僋偵僶僢僋傾僢僾偟偰偄偨偺偱徚幐偺擄偼摝傟偨偺偩偗傟偳丄幚偼傕偆彮偟偱戝曄側偙偲偵側傞偲偙傠偩偭偨丅
偲偄偆偺傕丄偮偄愭擔壠懓偑巊偭偰偄傞僲乕僩PC偺OS偑傇偭偲傫偱丄僲乕僩PC偺僨乕僞偑偡傋偰側偔側偭偰偟傑偆偐傕偟傟側偄偲偄偆帺懱偑敪惗偟偰丄僴乕僪僨傿僗僋傪弶婜壔偟側偄忬懺偱儕僇僶儕乕偡傞偙偲偱僨乕僞傪曐岇偟偨偲偄偆帠審偑偁傝傑偟偨丅偱偡偺偱丄乽僨乕僞僒乕僶乕偵擖傟偰偍偗偽丄僶僢僋傾僢僾傕偡傞偐傜埨怱偩傛乕丅乿偲恑尵偟偨寢壥丄婋偆偔幐偄偐偗偨僨僕僇儊僨乕僞傪僨乕僞僒乕僶乕偵僐僺乕偟偰丄僲乕僩PC偐傜偼嶍彍偟偨偲偙傠偩偭偨偺偱偡丅丂恑尵偳偍傝偵僶僢僋傾僢僾偑庢傟偰偄傟偽栤戣側偐偭偨偺偩偑丄廡1夞偺僶僢僋傾僢僾幚峴慜偵愭偺帠屘偑偁偭偨傕偺偩偐傜丄帠幚忋僨僕僇儊僨乕僞偼徚幐偟偰偟傑偄傑偟偨丅丂偲偙傠偑丄偱偐偄僨乕僞側偺偵側偤偐偡傋偰僑儈敔偐傜媬嵪偱偒偰彆偐偭偨乣偲偄偆偙偲偑偁偭偨偺偱偟偨丅
偝傜偵偼僲乕僩PC偵偼僐僺乕偣偢丄捈愙僒乕僶偵僗僩傾偟偨僨僕僇儊僨乕僞傕偁偭偨偺偩偑丄偦傟偼杮摉偵偨傑偨傑CD偵從偄偨偺偱偙傟傑偨徚幐傪柶傟偨偺偱偟偨丅僾儘僌儔儉僨乕僞側傫偧偼傕偟徚幐偟偰偟傑偭偰傕帺暘偺摢偐傜傑偨惗惉偱偒傞偐傕偟傟側偄偗偳丄僨僕僇儊僨乕僞偼傕偆庢傝栠偣側偄偐傜儂儞僩偵傗偽偄偲偙傠偱偟偨丅
丂
偝偰丄儔儉僟丅
exception偑敪惗偡傞尨場偼傢偐傜側偄傑傑偩偗偳丄exception傪敪惗偝偣側偄偱妏搙僨乕僞偺庢摼偼偱偒傞傛偆偵側傝傑偟偨丅偱傕丄側乕傫偐偍偐偟偄丅
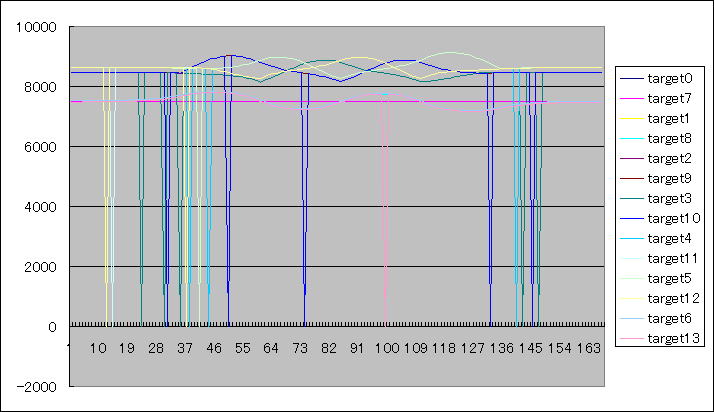
伀偙傟偑僒乕儃偵梌偊偰偄傞妏搙僨乕僞丅丂偲偙傠偳偙傠偵侽偲偄偆僨乕僞偑偁傞偺偩偑丄側偤偙傫側傕偺偑偁傞偺偐傢偐傜傫丅
伀偦偟偰偙傟偑僉儍僾僠儍乕僨乕僞丂墭偄丅丂側傫偩偙傝傖丠丠丂埲慜偵僉儍僾僠儍乕偟偨帪偼撉傒崬傒儈僗偼奆柍偩偭偨偺偵側偵偑偳偆側偭偰偄傞偺偩傠偆偐丅
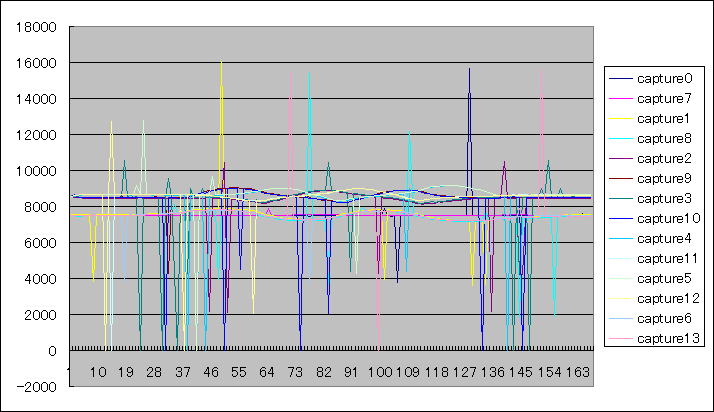
傊傫側抣偼暿偲偟偰丄侽偺晹暘偼巜帵僨乕僞偲僉儍僾僠儍乕僨乕僞偱堦抳偟偰偄傞偺偱丄僾儘僌儔儉忋偺栤戣傜偟偄丅丂偁偒傜偐偵妱傝崬傒張棟偑偐傜傫偱偄傞傒偨偄側偺偱桱烼偱偡丅(^_^;)
仭俉寧俀俁擔仭
嶐擔偼儘儃僢僩楙廗夛丅丂偱傕丄偪傚偭偲慜偵Digikey偵拲暥偟偰偄偨BeagleBoard偑撏偄偨偺偱丄偦偺廃曈晹昳傪攦偆偨傔偵廐梩尨偵婑傝摴偟傑偟偨丅
攦偭偨偺偼
丒俙俠傾僟僾僞乕
丒USB僴僽乮AC傾僟僾僞晅偒乯
丒係GBSD儊儌儕乕僇乕僪
丒SDHC懳墳偺SD儊儌儕乕傾僟僾僞
丒USB僉乕儃乕僪
丒USB儅僂僗
丒HDMI-DVI働乕僽儖
偁偲丄PC偺儅僓乕儃乕僪偐傜COM億乕僩傪堷偒弌偡帪偵巊偆丄僿僢僟乕僺儞-Dsub9诉輦虄P乕僽儖偑梸偟偐偭偨偺偩偑丄30暘偔傜偄扵偟偰傕尒偮偐傜側偐偭偨丅丂壸暔傕廳偐偭偨偺偱掹傔偰楙廗夛応傊丅
BeagleBoard偼CPU儃乕僪偱丄僗僩儗乕僕偵SD僇乕僪傪巊偆偙偲偱Linux傪摦偐偡偙偲偑偱偒傑偡丅RAM偼256MB丄儁儕僼僃儔儖偲偟偰偼USB億乕僩偑偁傞偺偱僴僽傪宱桼偡傞偙偲偱丄僉乕儃乕僪丒儅僂僗丒LAN億乕僩側偳傪偮側偘傞偙偲偑偱偒傑偡丅偦偺傎偐丄僆乕僨傿僆擖弌椡丄價僨僆弌椡傕偱偒偰丄Digikey偱15000墌庛丅丂埨偄両
偙偄偮傪攦偭偰丄僱僢僩儚乕僋僒乕僶乕傪嶌傞偭偰傢偗偠傖側偔丄傕偪傠傫儘儃僢僩偺戝擼偵偟偰傗傠偆偲偄偆偮傕傝側偺偱丄價僨僆弌椡傕僉乕儃乕僪傕儅僂僗傕杮摉偼梫傜側偄傫偩偗偳丄傑丄堦搙偼僼儖偱摦偐偟偰傒傛偆偐側偭偰偙偲偱攦偄懙偊偰偒傑偟偨丅丂棫偪忋偘偵昁恵偺僐儞僜乕儖僐僱僋僞偑庤偵擖傜側偐偭偨偗偳丅(^_^;)
僐儞僜乕儖僐僱僋僞偐傜Dsub偵曄姺偡傞偺偼3杮偺慄傪堷偭挘傝弌偣偽偄偄偩偗側偺偱丄寢嬊偼帺暘偱嶌偭偪傖偄傑偟偨丅
偁偲偼HDMI-DVI働乕僽儖偺僐僱僋僞偑偱偐偔偰僨傿僗僾儗僀偲姳徛偟偰憓偣側偄偲偄偆栤戣偑偁傝傑偟偨偗偳丄僐僱僋僞僇僶乕傪堦惗寽柦嶍偭偰側傫偲偐偮側偓傑偟偨丅
僀儞僗僩乕儖偼擔宱Linux偺2009擭7寧崋傪嶲峫偵丅丂岆怉偩傜偗偩偭偨偗偳丄偦傟埲奜偼弴挷偵峴偒傑偟偨丅
伀CPU儃乕僪偼3僀儞僠亊3僀儞僠

伀LAN偵傕柍帠偮側偑偭偰僱僢僩傕尒傟傑偟偨丅
GPIO傕巊偊傞傒偨偄偩偐傜LED揰柵偲偐僗僀僢僠偲偐偮側偘偰傒傑偟傚偆偐丅
偙偺僀儞僗僩乕儖偺偨傔偵丄PC偵Linux丂Ubuntu僨僗僋僩僢僾傪僀儞僗僩乕儖偟傑偟偨丅Linux僨傿僗僩儕價儏乕僔儑儞偺恑壔偼偡偛偄偱偡偹丅Windows偐傜忔傝姺偊偰傕偄偄傫偠傖側偄偐偲巚偄傑偡丅丂傾僢僾僨乕僩忣曬傕帺摦峏怴偱偒偪傖偆傒偨偄偩偟丅丂丒丒丒傕偆Windows偼偳傫偳傫廳偔側偭偰偒偰僀儎偱偡丅(乕乕;)
丂
儔儉僟偱偡偑丄丄
楙廗夛偱僆僒儖恊巕偵乽崱擔偼儔儉僟偑曕偔偲偙傠尒傟傑偡偐丅乿偲偄偆尩偟偄僾儗僢僔儍乕傪暦偒棳偟丄僉儍僾僠儍乕偺僨僶僢僌傪偟偰偍傝傑偟偨丅
嬥梛擔偵丄巇帠拞偵巚偄偮偄偨僞僀儈儞僌儈僗偑撉傒庢傝儈僗偺尨場偩偲巚偄偮偄偰丄偦偺専徹側偳傗偭偰偍傝傑偟偨偑丄偝偭傁傝専摙堘偄偱偟偨丅偑偭偔傝丅丅
偦傟傛傝傕丄偄偮傕忯偵僷儞僠僇乕儁僢僩傪晘偄偨忋偱摦偐偟偰偄偨偺偱婥偑偮偐側偐偭偨偺偩偗偳丄僒乕儃偺僩儕儉挷惍偑庢傟偰偄傑偣傫丅峝偄彴偩偲僈僞僈僞偟偰傑偡丅偙傟偼傑偢偄側丅丂偦傟偵丄懌崅偝偑巜帵抣偐傜戝偒偔偢傟偰偄傞丅偁傟丠偍偐偟偄側丅
偲偄偆傢偗偱丄傑偢偼僒乕儃偺僩儕儉挷惍偺傗傝側偍偟丅丂崱偼偁傞億乕僩偵偮側偄偩忬懺偱偟偐僩儕儉挷惍偱偒側偄傛偆側僾儘僌儔儉偟偐嶌偭偰偄側偐偭偨偺偱丄偄偮偱傕偳偙偱傕僩儕儉挷惍偱偒傞傛偆偵僾儘僌儔儉偟傑偟傚偆丅丂偁偲丄懌崅偝偺僘儗偼僆僼僙僢僩抣偺嬌惈偑娫堘偊偰偄偨偺偑尨場偱偟偨丅
僆僼僙僢僩抣偺嬌惈傪廋惓偡傞偲丄彮偟偩偗曕偗傞傛偆偵側偭偰偒傑偟偨丅偄偄偧偄偄偧丅
仭俉寧俀係擔仭
僒乕儃偺妏搙僉儍僾僠儍乕晹暘偺廳戝側僶僌傪敪尒偟偰丄exception偺敪惗偼傎傏側偔側傝傑偟偨丅丂傎傏丄偲偄偆偺偼廋惓偟偰偐傜1搙偩偗弌偰偟傑偄傑偟偨丅丅(>_<)丂廔傢偭偨偲巚偭偨偺偵丅丅丅
傕偭偲傕丄偳偆傗傜malloc( )偼儊儌儕乕傾儘働乕僔儑儞僄儔乕傪曉偝側偄偺偱丄malloc僄儔乕偩偭偨壜擻惈傕偁傝傑偡丅丂庢摼傾僪儗僗傪娔帇偟偰丄RAM僄儕傾奜偩偲僄儔乕偩偲敾抐偡傞婰弎偑梫傝偦偆偱偡丅
偦偪傜偺曽偼戝暆偵慜恑偟偨姶偠偑偁傝傑偡偑丄僉儍僾僠儍乕偺僄儔乕偼傑偭偨偔夵慞偟傑偣傫丅丂僞僀儈儞僌傗庤弴偱偼側偔丄揱憲楬傪尒捈偟偨曽偑傛偝偦偆偱偡丅丂埲慜偵偆傑偔偄偭偨偲偒偐傜偺嵎暘傪峫偊傞偲丄丄丄働乕僽儖傪懇偹偰惍慄偟偨側偀丅丂偽傜偟偰傒傑偡偐丅
僄儔乕偩傜偗偺僉儍僾僠儍乕僨乕僞傪挱傔偰傒偨偺偱偡偑丄傗偼傝丄巜帵妏搙偲戝偒側嵎偑偁傞偺偼屢娭愡儘乕儖丅偦偺懠偺僒乕儃偼尠挊側僘儗偼側偄丅丂晧壸僨乕僞傪尒傞偲旼偺曽偑晧壸偑戝偒偄偙偲偵側偭偰偄傞偐傜偪傚偭偲崲偭偨側丅丂傗偭傁傝晧壸嶼弌偵壗偐栤戣偑偁傝偦偆側婥偑偟偰側傜側偄丅
曕偔條巕傪尒偰丄僉儍僾僠儍乕僨乕僞偲斾妑偟偰傒傞偲丄忋懱偑巟帩媟懁偵堏摦偟偒傜偢偵丄梀媟傪忋偘傞摦嶌偑巒傑偭偰偟傑偆偨傔丄忋懱偑梀媟懁偵搢傟偙傫偱偟傑偭偰偄傞偨傔偵巟帩妏搙埲忋偺幚妏搙偵側偭偰偟傑偭偰偄傞傛偆偵尒偊傞丅丂偮傑傝丄椉懌巟帩婜娫傪帩偮昁梫偑偁傞偲偄偆偙偲偩丅丂曕梕惗惉儖乕僠儞偵庤傪擖傟側偒傖側傜側偄側丅
伀屢娭愡儘乕儖幉偺巜帵妏搙偲幚妏搙丂巟帩媟偵側偭偰偄傞帪偺妏搙偺僘儗偑戝偒偄丅
仭俉寧俀俇擔仭
傗偭傁傝晧壸寁嶼寢壥偼偍偐偟偄偲巚偄偮偮丄師偵恑傫偱偄偨偺偩偑丄偄偞晧壸僨乕僞傪妶梡偡傞抜偵側偭偨傜傗偭傁傝婥偵側偭偰庤偑恑傑側偄丅
儔儉僟偐傜儅乕僉儏儕乕偵堏怉傪偟偨摉帪偺晧壸寁嶼寢壥偼僌儘乕僶儖嵗昗尨揰偱寁嶼偟偰偄偰傕栤戣側偔寁嶼偱偒偰偄偨偼偢丅丅丂婰壇傪庤孞傞偲丄儀僋僩儖娭悢傪惍棟偟偨帠傪巚偄弌偟偰偒偨丅丂摉帪偺僶僢僋傾僢僾偑巆偭偰偄側偄偐偳偆偐傪妋擣偟偰傒偨偑丄尒摉偨傜側偄丅
巇曽偑柍偄偺偱儔儉僟偱偺晧壸寁嶼偺僜乕僗偲徠傜偟崌傢偣偰傒偨丅
嘆偍偭両嬻娫壛懍搙偺嶼弌偱堘偆婰弎傪偟偰偄傞偲偙傠偑偁傞両丂嫵壢彂偲斾傋偰傒傞偲丄丄儅乕僉儏儕乕偺曽偑偁偭偰傞傗乕傫丅儔儉僟偺僶僌敪尒丅
嘇偍偋丄儘儃僢僩偺岦偒偑幉偺妏懍搙丒妏壛懍搙偵斀塮偝傟偰側偄傗傫両乮偙傟偼屻傎偳偦傟偱偄偄帠偑傢偐傞乯
嘊偁丄梀媟偺妏懍搙丄妏壛懍搙偺晞崋偑堘偆両丂捈偟偰傒偨偗偳塭嬁側偟丅乮側偤塭嬁偑側偄傫偩傠偆丠乯
嘋偁傟乣丄幙揰偺廳椡塭嬁偺崁傪徣偄偨傜晧壸偑慡晹僛儘偵側偭偰偟傑偭偨両乮偙偺曈傝偱廳戝側儈僗偑撪嵼偟偰偄傞偙偲傪妋怣偡傞乯
嘍塣摦検偲妏塣摦検偺寁嶼幃偍偐偟偔側偄偐丠乮偲夛幮偱巚偄偮偔乯仺偍偐偟偔側偐偭偨偺偩偑丄儀僋僩儖偺妡偗嶼偺娭悢偑娫堘偊偰傞傗乕傫丅
嘐傗偭偨丄僌儘乕僶儖嵗昗傪巊偭偰傑偲傕側寁嶼寢壥偑弌偨両
嘑僇乕僽曕峴偩偲傕偺偡偛偄僀儞僷儖僗偑弌偰偟傑偆丅偍偐偟偄側丅
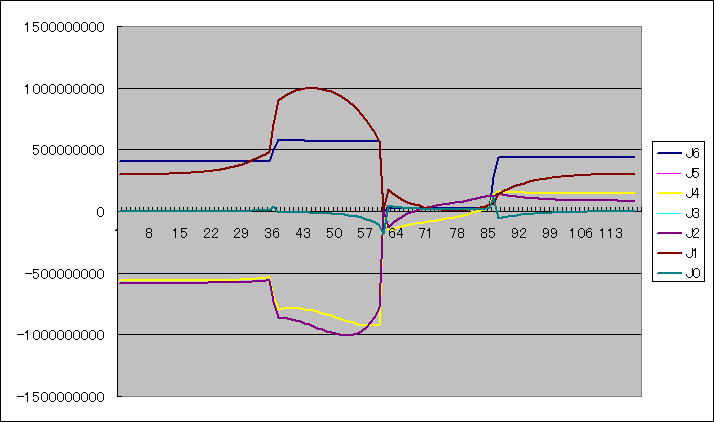
嘒幉偺妏搙丒妏懍搙丒妏壛懍搙傪僼傽僀儖偵弌椡偟偰専嵏丅丂側傫偩偙傝傖丠慡晹摨偠悢抣丠妏壛懍搙偑傎偲傫偳侽偱偨傑偵偱偐偄僷儖僗偑弌傞偩偗丠丠丠仺丂嘇偺愜崬偑娫堘偄偩偭偨丅
偦偟偰傗偭偲偦傟傜偟偄寁嶼寢壥偑弌傑偟偨丅丂幉偺妏壛懍搙偱偱偐偄抣偑弌傞偺偼摉慠丅弌側偄曽偑偍偐偟偄偺偱偟偨丅
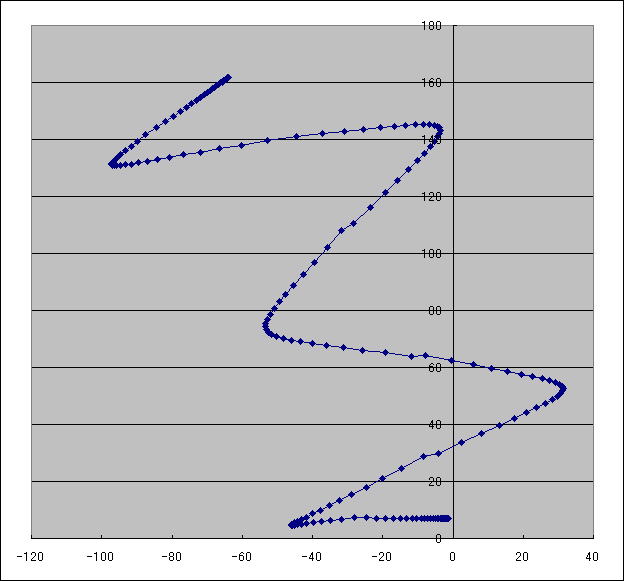
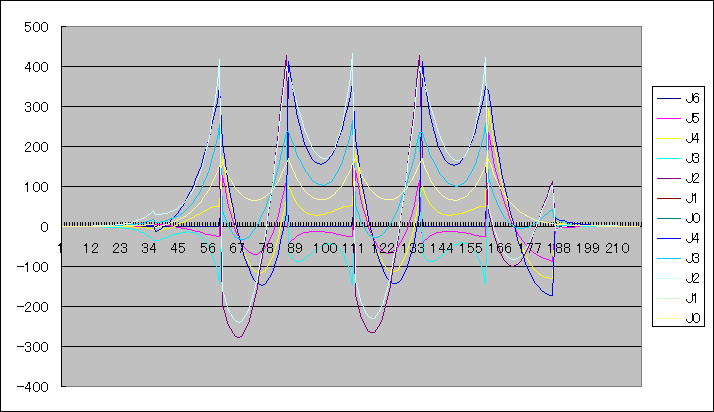
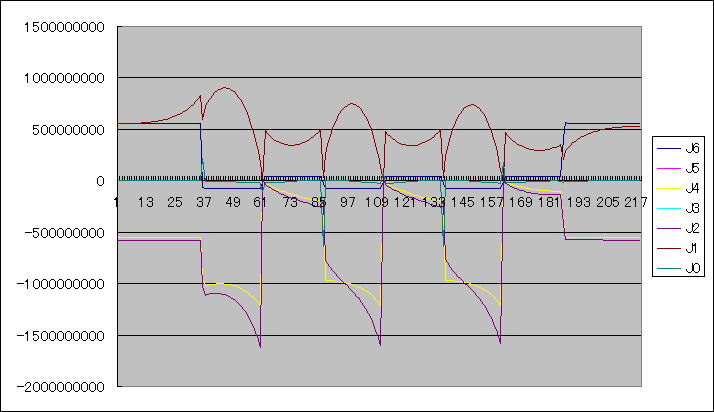
伀偙傟偑捈恑曕峴偺塃懌丄嵍懌丅丂梀媟偺擖傟懼傢傝偺僞僀儈儞僌偱儓乕幉偵僷儖僗偑弌偰傑偡丅丂僷儖僗傪彍偔偲傕偭偲傕晧壸偑戝偒偄偺偼屢娭愡儘乕儖幉丄曗惓偑昁梫側偺偼10^9埲忋偲峫偊偰傛偝偦偆丅丂僷儖僗晹暘偵曗惓傪偐偗偨曽偑偄偄偺偐偳偆偐偼幚尡偟偰傒偰妋擣偱偡偐偹丅
伀偦偟偰偙傟偑僇乕僽曕峴偱偺塃懌丄嵍懌丅丂傎傏捈恑帪偲摨偠傛偆側寁嶼寢壥偵側偭偰偄傑偡丅
屢娭愡儘乕儖偵斾傋偰丄懌庱儘乕儖偼傎偲傫偳晧壸偑偐偐偭偰偄傑偣傫丅傕偪傠傫丄偙傟偼寁嶼偵傛傞傕偺側偺偱棟憐揑側摦偒偺寢壥偱偁傞偐傜側偺偱偡偑丄ZMP偲傎傏摨偠埵抲偵偁傞幉側偺偱丄儌乕儊儞僩偼傎傏僛儘偵側傞偺偑惓偟偄偺偱偡丅
傛乕偟丄傗偭偲晧壸嶼弌偵偮偄偰偼惏傟傗偐側婥帩偪偵側傟偨丅丂師偼曕梕偺挷惍丅丂椉懌巟帩婜娫傪愝偗傞傛偆偵奼挘偟側偔偰偼側傜側偄丅
仭俉寧俀俉擔仭
嶐擔偼娭愡晧壸偺寁嶼偑偆傑偔偄偭偨偺偱丄婥傪傛偔偟偰堸傒偵峴偭偰傑偟偨丅丂偍偐偘偱崱擔傕偖偭偨傝偟偰偟傑偭偰擼傒偦摦偄偰傑偣傫(^_^;)
儘儃儚儞晉嶳丄丂弌応偟側偄偺偼傕偪傠傫偺偙偲側傫偩偗偳丄娤愴傕偳偆偟傛偆偐側丄偄傑傑偱抧曽奐嵜偼娤偵峴偭偨偙偲偑側偄偺偱崱夞傕棳偡偐側偀偲峫偊偰偍傝傑偟偨偑丄暯栰偝傫偺僽儘僌傪尒偰丄傆傜傝偲娤偵峴偭偪傖偍偆偐偲傕峫偊偨傝丅丂9寧枛偼丄擔怘傪娤偵峴偭偨7寧屻敿偵懕偄偰巇帠偺嶳応側偺偱傗偭傁傝偡傫側傝偲媥傔傞偐偑偪傚偭偲晄埨偱偡偑丄暯擔偵媥壣傪庢傞傢偗偱偼側偄偺偱戝忎晇偐側丅
傑偢偼梊栺偩偗偼偟偰偍偔偐丅丂
仭俉寧俀俋擔仭
僩儕儉挷惍偺偨傔偺僾儘僌儔儉傪嶌惉丅丂偲偄偆偐儔儉僟丒儅乕僉儏儕乕偺惂屼僾儘僌儔儉偵彂偒懌偟偨偺偩偗側偺偩偑丅
娙扨側僾儘僌儔儉偺偮傕傝偩偭偨偺偵偁偪偙偪傂偭偐偐偭偰悘暘帪娫傪偐偗偰偟傑偭偨丅丂傗偭偲弌棃偨偲巚偭偰挷惍偟傛偆偲偟偨傜丄偄偔偮偐偺僒乕儃偑尵偆偙偲傪暦偐側偔側偭偰偟傑偭偨丅丂偍偭偐偟乕側乕丅丂ROM僨乕僞傪偄偠傞偐傜拲堄偟側偑傜僨僶僢僌偟偨偺偩偑丄丄丄丅
挷傋偰傒傞偲丄摨偠UART偵偮側偑偭偰偄傞4屄偺僒乕儃偺偆偪丄ID2偺僒乕儃偺ROM僨乕僞偑彂偒姺傢偭偰偍傝丄ID0偵側偭偰偟傑偭偰偄傞丅摨偠儔僀儞偵ID0偑傆偨偮偵側偭偰偟傑偭偰偆傑偔摦偐側偐偭偨傢偗偩丅
嫲傜偔偼丄ID0岦偗偺ROM僨乕僞傪憲偭偨偲偙傠偑僨乕僞壔偗傪婲偙偟偨偐側偵偐偱丄ID2偺僒乕儃偑帺暘埗偺僨乕僞偩偲巚偭偰庴偗庢偭偰偟傑偭偨偺偩傠偆丅丂僠僃僢僋僒儉偝偊側偄偐傜僠僃僢僋偺偟傛偆偑側偄偺偩丅
崱偼丄1儔僀儞偵4屄偺僒乕儃傪忔偣偰偍傝丄ID0偐傜ID3傪巊偭偰偄傞丅丂偙傟偩偲丄1價僢僩僄儔乕偱丄ID0偑ID1偵側偭偨傝ID2偵側偭偨傝丄丂ID1偼ID0偵側偭偨傝ID3偵側偭偨傝丄ID2偼ID0偵側偭偨傝ID3偵側偭偨傝丄ID3偼ID1偵側偭偨傝ID2偵側偭偨傝偟偰偟傑偆丅
ICS2.0偱偼ID偼0偐傜31傑偱偺32庬椶偁傞偺偱丄偙傫側偵媷孅偵巊偆昁梫偼側偄傢偗偱丄ID1丄ID2丄ID4丄ID8丂偲尵偆嬶崌偵偮偐偊偽丄嵟埆偱傕2價僢僩偑傂偭偔傝曉傜側偄偲僨乕僞偺庢傝堘偊偼婲偙傜側偄丅丂嵟弶偐傜偦偆偡傝傖傛偐偭偨側丅丂偙傟偐傜ID曄峏偡傞偺偼寢峔戝曄側嶌嬈偩傛丅(乕乕;)
偁偲丄偍偐偟偔側偭偨僒乕儃俁偮偺偆偪丄2偮偼ICS儌乕僪偑夝彍偝傟丄PWM儌乕僪偵側偭偰偟傑偭偰偄偨丅ID偺彂偒姺傢傝偼側偐偭偨偺偱愭偺尰徾偲偼暿偺栤戣丅
偙傟偼嫲傜偔偩偑丄僨僶僢僌偺抜奒偱ROM僨乕僞傪僨僞儔儊偵憲偭偰偟傑偭偨乮4byte僘儗僨乕僞傪憲怣偟偰偟傑偭偨乯偙偲偑偁傝丄傗偭偪傖偭偨乕偲偄偆応柺偑偁偭偨偺偩偑丄側傫偩偐栤戣側偝偘偩側丠偲偄偆偙偲偑偁傝傑偟偰丄嫲傜偔偦偺偲偒偵僒乕儃懁偺張棟偲偟偰壗傜偐偺弶婜壔偑峴傢傟偨偺偱偼側偄偐偲巚偄傑偡丅丂憐憸偱偡偗偳偹丅
偢傟偨僨乕僞奺儗僕僗僞抣偲偟偰偼偁傝偊側偄抣偵側傞偙偲偑偁傞偐傜偦傟偵懳偡傞曐岇張抲偼偁傞傛偆偩丅
柧擔偼ID偺晅偗捈偟偐傜僗僞乕僩偱偡丅(>_<)
僒乕儃偺ID晅偗捈偟傪偡傞偮偄偱偵働乕僽儖偺惍慄傪夝偒傑偡丅丂傕偟偐偟偰働乕僽儖傪懇偹偨偣偄偱僲僀僘偑忔偭偰僉儍僾僠儍乕偵幐攕偡傞偺偐傕偟傟側偄偲偄偆偙偲偱奜偟偰幚尡偡傞梊掕偱偟偨偺偱丅
ID偺晅偗捈偟傪偟偨傜僩儕儉挷惍偺懕偒丅丂ID晅偗捈偟偨寢壥丄堘偆僒乕儃偵彂偒崬傫偱偟傑偆傛偆側帠懺偵偼側傜側偐偭偨偗偳丄僄儔乕偱偳偆偟偰傕僩儕儉抣傪彂偒崬傔側偄僒乕儃偑偄偔偮偐偁偭偨丅丂偆偆傓丅丅婥帩偪埆偄偑僩儕儉偩偗偺偙偲偩偐傜丄偙偙偼僗億僢僩揑偵働乕僽儖攝慄傪曄峏偟丄僩儕儉挷惍傪偡傞偙偲偵丅
挷惍偡傞慜偐傜斾傋傞偲悘暘偲寁嶼偳偍傝偺埵抲偵懌偑偔傞傛偆偵側偭偨偺偩偑丄傑偩曕偗側偄丅
師偵巟帩媟偲梀媟偺愗傝懼傢傝帪偵椉懌巟帩婜娫傪愝偗傞傛偆偵曕梕惗惉儖乕僠儞傪廋惓偡傞丅丂崱偼丄椉懌偑抧柺偵拝偔偺偼1僼儗乕儉偩偗側偺偩偑丄偙傟傪悢僼儗乕儉愝偗偰廳怱偺堏摦傪懍傗偐偵峴偆丅
椉懌巟帩婜娫傪愝偗傞偙偲偱丄偡傝懌婥枴偵曕偒弌偟偨丅
偱傕丄懌忋偘悺朄傪戝偒偔偡傞偲偽偨偮偄偰偙偗偰偟傑偆丅旝柇偩丅
MDF儃乕僪忋偱曕偐偣傞偲僗儕僢僾婥枴偵側傫偲偐曕偔偺偩偑丄僇乕儁僢僩忋偩偲僗儕僢僾偟側偄偺偱嵍塃偵悂偭旘傃婥枴偵側傞丅丂椉懌巟帩婜娫傪戝偒偔偡傞偲悂偭旘傃搙崌偄偑憹偡丅
偙傟偼丄ZMP婯斖偱廳怱婳摴惗惉偟偨応崌偵丄巟揰晅嬤偺幙揰傪寁嶼偵擖傟傞偲偪傚偭偲偆傑偔側偄偲偄偆儔儉僟偱憳嬾偟偨尰徾偲摨偠偱偡丅傗偼傝懌庱偐傜壓偺幙揰偼ZMP嶼弌偐傜彍奜偟偨曽偑傛偝偦偆偱偁傞丅乮巟帩媟偺傒偹乯
偙偙傑偱偺嶌嬈偼傑偀弴挷丅丂師偵僉儍僾僠儍乕晹暘偵嵞挧愴丅丂exception偺栤戣偼夝寛偟偨偺偱丄偪傖傫偲娭愡妏搙傪儔僕傾儞昞婰偱僗僩傾偡傞傛偆偵僾儘僌儔儉傪廋惓偟傑偟偨丅
偙偙偐傜偑栤戣丅
僉儍僾僠儍乕抣偳偙傠偐巜帵抣傕偍偐偟側抣偵曄姺偝傟偰偟傑偆丅丂寁嶼幃傪尒捈偟偨偑傢偐傜側偄丅丂慡晹偑偍偐偟偄傢偗偠傖側偔偰晹暘揑偵偍偐偟側抣偵側傞偺偩丅
傑乕偨妱傝崬傒偺栤戣偐丠丠丠丂傗偩側偀偲巚偄偮偮栤戣屄強傪摿掕偡傞偲丄側傫偲攞惛搙抣摨巑偺妡偗嶼偑偍偐偟偄丅丂偝偡偑偵僐儞僷僀儔僄儔乕偼偁傝偊側偄偩傠偆偲巚偄偮偮怓乆偲挷傋偰傒偨偑傢偐傜側偄丅
嵟屻偼堦掕曄壔偡傞抣傪寁嶼偟偰丄傗偭偲栤戣偺朄懃惈傪尒偮偗傑偟偨丅丂帺暘偱嶌偭偨晜摦彫悢揰悢偺昞帵娭悢偺僶僌偱偟偨丅丂偊乣傫(>_<)丂printf( )巊偊傟偽偙傫側柍懯帪娫夁偛偝側偔偰傛偐偭偨偺偵丅
仈偦偆偄傗丄scanf傕巊偊側偄偺偐側丅偒偭偲巊偊側偄傛偆側婥偑偡傞丅丅丅丂僒乕儃愝掕僾儘僌儔儉偵巊偭偰傞偺偵側丅丅丅帺暘偱嶌傞偺僀儎偩側丅
壓傜側偄僶僌偵悘暘偲帪娫傪庢傜傟偰偟傑偄傑偟偨偑丄傗偭偲夝寛丅丂偙傟偐傜偼埨掕曕峴偡傞傛偆偵曕梕挷惍偲懌棤挷惍偱偡丅
偄傑丄忋敿恎偼偲傝偁偊偢宍偵側偭偰偄傞偑丄尐廃傝傗丄攚拞偵攚晧偭偨RPU-100側偳偙偗偨帪偺僟儊乕僕偑戝偒偦偆側晹暘偑巆偭偰偄傑偡丅崱屻偼偙偗傞偙偲慜採偺嶌嬈偵側傞偺偱偙偺曈傝偺嫮壔傕峫偊側偒傖側傜側偄偱偡丅