 丂儃乕儖偺曽岦偵岦偔傛偆偵慁夞摦嶌傪偡傞儔儉僟
丂儃乕儖偺曽岦偵岦偔傛偆偵慁夞摦嶌傪偡傞儔儉僟仭侾寧俁擔仭
怴擭偁偗傑偟偰偍傔偱偲偆偛偞偄傑偡丅丂崱擭傕傛傠偟偔偍婅偄偟傑偡丅
擭枛偼俀俈擔偵婣徣偟偰丄曣恊偺婌庻偺偍廽偄傪偟偰傑偄傝傑偟偨丅丂偦偺偨傔丄俀俈擔偺楙廗夛偲朰擭夛偵偼弌惾偱偒傑偣傫偱偟偨丅丂巆擮丅 楙廗夛傕丄晛抜偼偙傜傟側偄恖偨偪偑嶲壛偟偰偄偨傛偆偱丄婄弌偡偩偗偱傕峴偙偆偐偲傕巚偭偨傫偱偡偑丄柍棟偱偟偨丅丂嶐擔偺栭偐傜U僞乕儞偩偭偨偺偩偗偳丄崱傑偱偱堦斣幵偑崿傫偱偄偰丄晛抜偼挬偺2帪偲偐3帪偵偼壠偵摓拝偡傞偺偵丄崱夞偼拝偄偨偺偑7帪丅丂屵慜拞偼偛傠傝偲揮偑偭偰懌傝側偄悋柊傪庢偭偰傑偟偨丅
棃廡枛偼傕偆傢傫偩傎乕側傫偩偗偳丄儔儉僟偺曽偼偝偭傁傝巇忋偑偭偰偍傝傑偣傫丅旕忢偵傗偽偄忬嫷偱偡丅
婣徣愭偵傑偱儘儃僢僩奐敪愝旛堦幃帩偭偰婣偭偰丄偦偙偦偙偼嶌嬈偟偨偺偱偡偑丄彑庤偑堘偆偲側偐側偐偆傑偔偄偐側偄傕偺偱岠棪埆偔偰恑傑側偄偟丄媫偵儔儉僟偑曕偐側偔側偭偨傝偱丄偁傑傝恑捇偟傑偣傫偱偟偨丅
崱夞丄曕峴偲僩儔僢僉儞僌偲壒惡擣幆傪摨帪偵摦嶌偝偣傛偆偲偟偰偄傞偺偱偡偑丄偳偆傗傜CPU偺僷儚乕揑偵偐丄僾儘僌儔儉偺嶌傝揑偵偐偼傢偐傝傑偣傫偑僟儊側傛偆偱偡丅丂偝偭傁傝曕峴偑偱偒側偔側傞帪偑偁傞偺偱怓乆妋擣偟偰傒偨偲偙傠壒惡崌惉僾儘僌儔儉傪掆巭偡傟偽夝徚偡傞偙偲偑傢偐傝傑偟偨丅丂偲傝偁偊偢偼壒惡崌惉偼掆巭偱偄偔偙偲偵偼側傝偦偆偱偡丅
僩儔僢僉儞僌偵偮偄偰傕丄儂儚僀僩僶儔儞僗偑偍偐偟偔側傞帠偑偁傝丄栚昗暔偑偝偭傁傝尒偊側偔側傞偙偲偑偟偽偟偽敪惗偟傑偡丅丂偼偠傔偳偙偐偺攝慄偺愙怗晄椙偐偲巚偭偨偺偱偡偑偦偆偱偼柍偝偦偆丅丂偄傑偺偲偙傠尨場晄柧偺傑傑偱偡丅丂偙偪傜偼帺棩偱僟僢僔儏2000偺戝帠側偲偙側偺偱戝栤戣丅丂偱傕丄偙偙偵偽偭偐傝傂偭偐偐偭偰傞栿偵傕峴偐偢丄傑偢偼帺棩偱摦嶌偱偒傞僾儘僌儔儉傪嶌傞曽偑愭寛偐側丅
側傫偩偐怴擭憗乆偁傟傕偙傟傕偆傑偔峴偐偢丄偤乕傫傇傎傝弌偟偰傆偰怮偟偰偟傑偄偨偄婥暘偱偡偗偳丄儔儉僟偺僨價儏乕偺偨傔偵傕偑傫偽傜偹偽丅丂偒偭偲偙傟偑堷戅帋崌偵側傝偦偆偩偟丅丅
仭侾寧係擔仭
崱擔偱惓寧媥傒傕廔傢偭偰偟傑偆丅
崱擔偼堦擔儔儉僟偺僾儘僌儔儉丅丂偟偐偟丄丄傑偩傑偩廔傢傝偑尒偊側偄丅丂崱廡媥傒偑庢傟傟偽傕偟偐偟偨傜側傫偲偐側傞偐傕偟傟側偄偑擄偟偄側偀丅
仭侾寧俆擔仭
傎傫偺偪傚偭偲丄傎傫偺偪傚偭偲偢偮偩偗偳恑捇偟偰偄傑偡丅
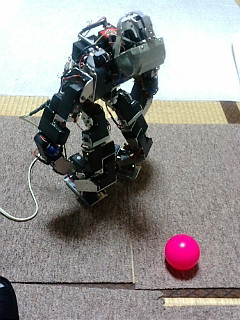
丂儃乕儖偺曽岦偵岦偔傛偆偵慁夞摦嶌傪偡傞儔儉僟
![]()
傕偆偡偖僷僀儘儞偵嬤偯偄偰偄偔偙偲偑偱偒傞傛偆偵側傝偦偆偱偡丅丂偦偆偡傟偽師偼偲偆偲偆僷僀儘儞偺廃傝傪夞傞偲偄偆摦嶌偵擖傟傑偡丅
僾儘僌儔儉傪埨掕偝偣側偑傜丄僩儔僢僉儞僌摦嶌偺挷惍傪偟偰偄偨偺偱偡偑丄巚偄捠傝偵摦偐側偄尨場傜偟偒傕偺傪傗偭偲撍偒巭傔偰傎傏栚昗暔偺曽岦偵岦偔偙偲偑偱偒傞傛偆偵側傝傑偟偨丅丂栚昗暔偵嬤偯偔偙偲偼偱偒偰偄偨偺偱偡偑丄栚昗暔偺曽岦偵岦偔偲偄偆偙偲偑側偤偐偆傑偔峴偐側偐偭偨偺偱偡丅丂尨場偼慁夞摦嶌帪偵摲懱偺巔惃抣傪夞揮偝偣傞僞僀儈儞僌偲丄栚昗暔偺曽岦傪敾掕偡傞僞僀儈儞僌偱偺僘儗偱偟偨丅丂傗傗偙偟偄巔惃抣傪嵦梡偟偰偄傞偍偐偘偱怓傫側偲偙偱傂偭偐偐傝傑偡丅(^^乁
偁偲偼慁夞偺曕暆傑偱偼壜曄偲偟偰偄側偄偺偱丄栚昗暔偵懳洺偡傞暘夝擻偼慹偄偱偡丅亇0.3准薇輥i亇17deg偔傜偄乯偺斖埻偵擖傟偽巭傑傞偲偄偆掱搙偺慹偝丅丂崱夞偼僒僢僇乕偡傞傫偠傖側偄偺偱偄偄偱偟傚偆丅
摦嶌偑晄埨掕側偺偱丄妱傝崬傒廃婜傪25ms偐傜50ms偵怢偽偟偰傒偨傝偟偨偺偱偡偑丄偁傑傝岠壥偑側偔丄偳偆偟偨傕偺偐偲擸傫偱偄偨偺偱偡偑丄僉乕擖椡懸偪儖乕僾偵sleep(10ms)丂傪擖傟傞傛偆偵偟偨傜悘暘偲埨掕偡傞傛偆偵側傝傑偟偨丅丂僩儔僢僉儞僌摦嶌偼偡偛偔妸傜偐偵側傝傑偟偨丅丂傕偭偲僂僃僀僩戝偒偔偟偰傒傛偆偐側丅
仭侾寧俇擔仭
傾僾儘乕僠乮栚昗暔偵嬤偯偔乯偲丄傾儔僂儞僪乮栚昗暔偺廃傝傪夞傞乯偺摦嶌偑偩偄傇偱偒傞傛偆偵側偭偰偒傑偟偨丅丂曕峴偼偁傑傝埨掕偟偰偄側偄偺偱僒億乕僩晅偒偱偡偑丅
僨僶僢僌偟偰偄傞偲帪偨傑乽偼傑傞乿偙偲偑偁傝傑偡丅丂僇儊儔偺壜摦斖埻傪挻偊偰偟傑偭偰僩儔僢僉儞僌偱偒偢偵屌傑偭偰偟傑偆偲偐丅丂屢偺娫偐傜栚昗暔偑尒偊偰偳偆偡傝傖偄偄偺丠偲偐丅
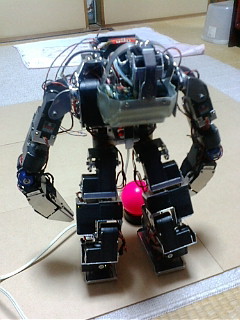 丂屢偺娫偐傜儃乕儖偑尒偊偰傞丅
丂屢偺娫偐傜儃乕儖偑尒偊偰傞丅
![]() 丂
丂![]()
偙傫側偲偒偼僩儔僢僉儞僌傪掹傔偰慁夞摦嶌偵堏峴偣偹偽側傜側偄丅丂偦偆偟偰偳傫偳傫偲暋嶨偵側偭偰偄偔偺偱偡丅(>_<)
偟偐偟丄傑偩傑偩傑偩傑偩傗傜側偒傖側傜側偄偙偲偑嶳愊傒丅丂奜憰偼丄丄丄柍棟偩側偀乣(>_<)
仭侾寧俉擔仭
嶐擔偼杮晹憤夛偱偦偺屻僷乕僥傿乕丅丂傎傏嫮惂嶲壛側偺偱僷乕僥傿乕偩偗弌偰婣傠偆偐偲巚偭偨偺偩偑丄傾儖僐乕儖偑擖偭偰偟傑偆偲僟儊偱偟偨丅(^_^;)丂擇擔悓偄偵側傞偔傜偄堸傫偱偟傑偭偨丅丂丂側偺偱嶐擔偺恑捇偼僛儘丅丂僷僀儘儞傪夞偭偰偐傜僑乕儖偵岦偐偆偨傔偺庤抜偑傑偭偨偔弌棃偰偄側偄偺偩偑丅
僷僀儘儞偺廃傝傪夞傞偺偼寢峔擄偟偔偰搑拞偱曽岦廋惓偺偨傔偵慁夞摦嶌傪偟側偗傟偽側傜側偄丅丂偦偆偡傞偲曕悢傪悢偊偰傕偁偰偵側傜側偄偺偱偳偆傗偭偰侾俉侽搙夞偭偨偐傪抦傞偐丄僑乕儖傪扵偡摦嶌偵堏峴偡傞僞僀儈儞僌傪寛傔傞庤抜偑枹偩柍偄偺偩丅
丂
曕峴偑埨掕偟偰偄側偄偺偱丄側傫偲偟偰傕揮搢庴恎傪偝偣偨偔側偭偨丅丂偲偙傠偑丄崱愊傫偱偄傞僕儍僀儘偼姶搙偑埆偔偰偆傑偔側偄丅丂傛偆偼巊偄暔偵側傜側偄丅丂偄傑偝傜僴乕僪傪偄偠傞帪娫偼側偄偺偱壛懍搙僙儞僒乕偱揮搢専弌偑偱偒側偄偐傪帋偟偰偄偨丅
寢壥偼亊丅丂(>_<)丂丂丂壛懍搙僙儞僒乕偼揮搢帪偵偼柍廳椡偲側傞偺偱専弌偑偱偒側偄丅偙偗偰偐傜儌乕僔儑儞敪摦偟偰傕抶偄傫偩傛偹乕丅丂崱擔堦擔偦傟偽偭偐傝傗偭偰偟傑偰婱廳側帪娫傪柍懯尛偄偟偰偟傑偭偨丅
柧擔偼丄婣傞偺偼憗偔偰傕11帪丅丂偄傛偄傛揙栭偟側偒傖側傜側偄偐傕偟傟側偔側偭偰偒偨丅丂揙栭偟偨傜師偺擔妋幚偵摦偗側偔側傞偺偱愨懳傗傝偨偔側偄偺偩丅
仭侾寧侾侽擔仭
偲偆偲偆傢傫偩傎乕慜擔偵側偭偰偟傑偄傑偟偨丅
堦墳僾儘僌儔儉揑偵偼姰惉偟偨偗傟偳丄僷儔儊乕僞挷惍偲偐偼偙傟偐傜丅
偁偲丄揮傇偲帺敪揑偵婲偒忋偑傜側丅丂曕偙偆偲偟偨傜婲偒忋偑傞偺偩偑丄曕偙偆偲偡傞偒偭偐偗偼栚昗暔傪扵偟偰傕尒偮偐傜側偄偐丄栚昗暔偑尒偮偐偭偨偲偒側偺偱帪娫偑偐偐傞丅丂揮傇偲帺敪揑偵婲偒忋偑傞傛偆偵偟側偔偪傖側傜側偄丅
奜憰偺偍柺晹暘偼揾憰傪曗廋偟偰嵪傑偣偨偑儃僨傿偼傕偆傏傠傏傠側偺偱僾儔斅偱偝偭偔傝嶌偭偨丅丂揾憰偩偲偡偖偼偑傟傞偐傜僇僢僥傿儞僌僔乕僩傪揬偭偨偺偩偑丄偄偄怓偑側偔偰宍傕暯扲側偺偱價僽僗傒偨偄丅(^_^;)
側傜偽價僽僗偵偟偪傖偍偆偭偰偙偲偱丄攚斣崋側傜偸嫻斣崋擖傟偰傒傑偟偨丅丂柧擔偼偙傟偱偄偄傗丅

仭侾寧侾係擔仭
傢傫偩傎乕捈慜偺僥儞僷僢偰偨帪偐傜傢傫偩傎乕屻偺曫偗偰偄偨婜娫傑偱丄悘暘偲擔帍偑峏怴偝傟偰偄傑偣傫偱偟偨丅(>_<)
嫀傞11擔丄傢傫偩傎乕偵嶲壛偟偰偒傑偟偨丅丂儔儉僟偺弶偺僀儀儞僩嶲壛偱偡丅丂寢壥偼35埵偐36埵偐丄(^_^;)丂傑偀嵟壓埵嬤曈偱偡丅丂崱夞偺嶲壛偺栚揑偼乽帺棩偱僟僢僔儏2000乿偩偭偨偺偱弴埵帺懱偼栤戣偠傖偁側偄偺偱偡偑丄偦偺僟僢僔儏2000丄儔儉僟偵偲偭偰偪傚偭傄傝偟傚偭傁偄僨價儏乕愴偵側偭偰偟傑偄傑偟偨丅
嬥梛擔偼桭恖偺憲暿夛偱廔揹娫嵺傑偱堸傫偱偟傑偭偨偺偱嶌嬈偼弌棃偢丄搚梛擔偺挬偐傜儔僗僩僗僷乕僩偱偡丅丂偙偙偵棃偰抜乆偲巇忋偑傝傕椙偔側傝僶僌傕弴挷偵庢傟偰偄偭偰偄偨偺偱偡偑丄怺栭1帪偛傠丄嬃湵偺庱巔惃偺嶼弌娭悢偵僶僌偑敪妎丅丂僷儞妏搙偑90搙傪挻偊傞偲晞崌偑媡揮偟偰偟傑偆尰徾偑敪妎丅丂媫绡寁嶼幃偺尒捈偟傪梋媀側偔偝傟傑偟偨丅
偱傕丄僷僀儘儞偺廃傝傪夞傞摦嶌偑晄埨掕偩偭偨偺偼偙偺寁嶼幃偺偣偄偩偭偨偺偩傠偆偲敾偭偰傎偭偲偟偨傝偟偰傑偟偨丅
偦偆偙偆偟偮偮丄堦墳宍偵側偭偨偺偑11擔偺屵慜5帪丅丂揹尮傪擖傟偨傜僾儘僌儔儉偑婲摦偡傞傛偆偵僙僢僩偟偰丄愝掕僼傽僀儖偺妋擣傪偟偰姰惉偲偟傑偟偨丅丂揙栭偵偼懴偊傜傟側偄僞僀僾側偺偱懪偪忋偘偺偙偲傕峫偊偰3帪娫偔傜偄怮傞偙偲偵丅
丂
挬婲偒偰嵟廔妋擣丅摦嶌偝偣偰傒傞偲丄偁傟丠栚昗暔偺僒乕僠摦嶌偑偍偐偟偄丠丂僼儕乕僘偟偰偟傑偆丠丂偁偣傝偦偆偵側傞婥帩偪傪梷偊偮偮丄椻惷偵忬嫷暘愅丅丅丂寢壥丄嶐擔廋惓偟偨庱巔惃偺曄姺娭悢偑塭嬁偟偰傑偟偰丄偓傝偓傝偱僶僌僼傿僢僋僗丅丂夛応偵岦偐偆偙偲偲側傝傑偟偨丅
丂
夛応偵偮偄偨傜壸暔傪奼偘偰丄傑偢僷僀儘儞傪庁傝偰怓挷惍傪偟傑偟偨丅丂埬偺掕丄僷僀儘儞偼僊儕僊儕擣幆偡傞偗偳丄墿怓偲偐傢傫偩傎乕T僔儍僣偵傕斀墳偟偰偟傑偆姶偠丅丂媫偓廋惓偟偰側傫偲偐傎傏僷僀儘儞偵偩偗斀墳偡傞傛偆偵側傝傑偟偨丅
偲偙傠偑偲偙傠偑丄偳偆偟偨偙偲偐丄帺暘偺懌曈傝傪尒偰壗偐傪尒偮偗偰偟傑偭偰偄傞丅丂傕偟偐偟偰働乕僽儖偺怓偵儅僢僠偟偪傖偭偨偐丠丂儌僯僞乕偱妋擣偡傞偲丄僶僢僥儕乕偺愒偄儔僀儞偵斀墳偟偰傑偟偨丅丂傗偽偄傗偽偄(^_^;)丂僶僢僥儕乕働乕僽儖偼崟偄價僯乕儖僥乕僾傪揬偭偰偍偒傑偟偨丅
 丂
丂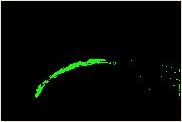
丂
偦偟偰丄偮偄偵僟僢僔儏俀侽侽侽偺弌憱弴偑夞偭偰偒傑偟偨丅丂堦弿偵弌憱偡傞偼偢偩偭偨儅僢僪僴儕働乕儞偑婞尃側偺偱1戜偱弌憱偡傞偙偲偵丅丂岆擣幆偺壜擻惈偑偪傚偭偲尭偭偰婐偟偐偭偨傝偟偰丅(^_^;)
1儊乕僩儖愭偺僷僀儘儞偑僀儅僀僠懆偊偒傟偰偄側偄傛偆偩偭偨偗偳丄曕偒弌偣偽嬤偯偄偰尒偊傞傛偆偵側傞偩傠偆偲巚偭偰僗僞乕僩偟傑偟偨丅
梊憐捠傝丄僷僀儘儞偵偼弴挷偵嬤偯偒傑偡丅丂偦偟偰戞擇僗僥乕僕偺僷僀儘儞廃傝傪慁夞丅丂偲偙傠偑偙偙偐傜偑偟傚偭傁偄帪娫偺巒傑傝偱偟偨丅
僷僀儘儞傪塃偵尒側偑傜塃偵僇乕僽曕峴偡傞僾儘僌儔儉偵側偭偰偄傑偟偨丅丂僷僀儘儞偺埵抲偑塃偐傜偢傟偰偄偨傜偦偺応慁夞偟偰埵抲庢傝傪廋惓偟傑偡丅丂僷僀儘儞偼儔儉僟偺塃偺偄偄埵抲偵尒偊偰偄傞偼偢側偺偵側偤偐慁夞傪丄偦傟傕嵍懁偵慁夞傪孞傝曉偟偰偟傑偆偺偱偡丅丂壠偱挷惍偟偨偲偒偵巊偭偨彴傛傝傕儕儞僌偺儊儔儈儞彴偺曽偑妸傞偨傔丄偙偗偵偔偔偼側偭偰偄偨偺偱偡偗偳丄曕峴傕梋傝忋庤偵偼峴偐側偄偺偱偦偺応偱偠偨偽偨偟偰偄傞姶偠丅丂
側傫偲偐僷僀儘儞偺廃傝傪夞偭偰梸偟偔偰擲偭偰偄偨偺偱偡偗偳丄摿暿偵惂尷帪娫傪夝偄偰傕傜偭偨偺偵傕尷搙偑偁傝傑偡丅丂儔儉僟偼婛偵僷僀儘儞偺廃傝傪夞傞僗僥乕僕偵撍擖偟偰偄偨偺偱僑乕儖偺僺儞僋儃乕儖傪傒偮偗偝偊偡傟偽儃乕儖偵岦偐偭偰恑傫偱偔傟傞偼偢丅丂巇曽柍偔儃乕儖傪帩偭偰儔儉僟偺惓柺懁偵夞偭偰暅楬僗僥乕僕偵嫮惂撍擖偟偰傕傜偄傑偟偨丅
寢壥丄僀僈傾偝傫偺僒傾僈偑俇昩俋俋偱憱攋偡傞嫍棧傪7暘埲忋傕偆傠偆傠偝偣偰偟傑偄傑偟偨丅丂僗僀儅僙儞丅
丂
偄偟偐傢偝傫丄傢傫偩傎乕僗僞僢僼偺奆條偦偟偰弌応幰偺奆條偵傕偛柪榝傪偍偐偗偟偰丄拞搑敿抂側僷僼僅乕儅儞僗偟偐偱偒側偔偰怽偟栿偛偞偄傑偣傫偱偟偨丅<(_ _)>
偱傕丄傕偟嫋偝傟傞側傜偽師夞偺傢傫偩傎乕傕弌応偟偰崱搙偙偦1暘埲撪偔傜偄偵僑乕儖偱偒傞傛偆丄儕儀儞僕偟偨偄偲巚偄傑偡丅丂
偁偲丄傕偟儔儉僟偑僷僀儘儞廃傝傪偺偨偺偨偲曕偄偰偄傞夋憸帩偭偰傞恖偑偍傜傟傑偟偨傜夋憸偄偨偩偗側偄偱偟傚偆偐乣丅
仭侾寧侾俆擔仭
偭偰彂偄偰擔帍傪傾僢僾偟偨15暘屻偵K偝傫偺僽儘僌偵儔儉僟偺夋憸偑傾僢僾偝傟偰傑偟偨丅(^丒^)丂僞僀儉儕乣侓
偦偟偰丄僀僈傾偝傫偐傜偺忣曬偱IKETOM偝傫偺YOUTUBE僠儍儞僱儖偵儔儉僟偺乽帺棩偱僟僢僔儏2000乿偺慡峴掱偑傾僢僾偝傟偰偄傞偙偲傪抦傞丅丂IKETOM偝傫偁傝偑偲偆偛偞偄傑偡丅丂尒偰傒傞偲丄傕偆丄側傫偩偐抪偢偐偟偄偔傜偄儓僞僢偰傑偡偹丄儔儉僟丅
儔僕僐儞偱曕偐偣傞帪偼丄偪傚偭偲偙偗偦偆偐丠偭偰応崌偵曕峴傪巭傔偰壛尭偟偨傝偱偒傞偺偩偗偳丄儔儉僟偼帺棩偱偦傟傪傗偭偰傑偡丅丂壛懍搙僙儞僒乕抣偺朶傟曽傪尒偰偄偰丄朶傟曽偑傂偳偄偲偙偗偦偆偩偭偰偙偲偱曕峴傪掆巭偟傑偡丅丂偙偺鑷抣傪偪傚偭偲掅傔偵愝掕偟偰傑偟偰丄嫲傜偔1曕曕偔枅偔傜偄偵偦傟偑摥偄偰偄偨傛偆偱偡丅丂偪側傒偵儔僕僐儞偱摦偐偡偲偒偼偦偺婡擻偼僉儍儞僙儖偟偰偄傑偟偨丅丂摦嶌偵偮偄偰偼慡偰儘僌傪庢偭偰偄偨傫偱偡偗偳丄偦偺偙偲偡偭偐傝朰傟偰傑偟偰丄儘僌傪僟僂儞儘乕僪偡傞慜偵揹尮傪棊偲偟偰偟傑偭偨(>_<)丂側偺偱摦嶌偺夝愅偑偱偒傑偣傫偱偟偨丅orz...
曕峴偺曽岦偺廋惓偼1曕偛偲偵峴偭偰偄傑偟偰丄栚昗暔偺曽岦傪斀塮偟偰僇乕僽曕峴偺敿宎傪曄峏偟偰偄傑偟偨丅丂偙傟傕1曕偱僼傿乕僪僶僢僋偡傞偺偱偼側偔丄悢曕儗儀儖偱僼傿乕僪僶僢僋偡傋偒偩偭偨偐傕偟傟傑偣傫丅
師偵乽帺棩偱丒丒丒乿偱僀儀儞僩偵弌傟偦偆側偺偼4寧偺廔傢傝偺傢傫偩傎乕丒傉偪丅丂懡懌偱傕偄偄傜偟偄偐傜傄偟偄偝傫偑尵偆傛偆偵僔僌儅偱帺棩偱丄埨掕偟偰僟僢僔儏2000偝偣偰傒傞偺傕偄偄偐傕丅丂儔儉僟偼僨價儏乕偟偨偗偳丄娭愡偑僈僞僈僞側偺偱懌峔憿偺尒捈偟傪偡傞偮傕傝丅丂師夞偺傢傫偩傎乕傑偱偵偼儔儉僟儅乕僋嘦偱弌応偟偨偄側偀丅
仭侾寧侾俉擔仭
嬥梛擔偼摑妵晹偺怴擭夛偱偟偙偨傑堸傫偱婣偭偨丅丂偺偱丄丄搚梛擔偼擇擔悓偄偱堦擔偳傛乣傫偲偟偰偄偨丅丂偳傛傫偲偟側偑傜傕擭枛偐傜傗傜側偗傟偽側傜側偐偭偨晹壆偺曅晅偗丄傢傫偩傎乕傪桪愭偵偟偰屻夞偟偵偟偰偄偨偺偩偑丄偦傟傪傗偭偨傝丅丂偙偺晹壆偙傫側偵峀偐偭偨傫偩側乕(^_^;)
丂
傢傫偩傎乕偵偰丄儔儉僟偱弶傔偰僀儀儞僩偵嶲壛偟偨傢偗偩偑丄嫞媄帺懱偲偼堘偭偰僀儀儞僩嶲壛偲偄偆揰偱弨旛偟偰偍偐側偗傟偽偄偗側偐偭偨揰偑偄偔偮偐偁偭偨偺偱夵椙偟偰偄偒偨偄偲巚偆丅
傂偲偮偼僐儞僜乕儖側偟偱偺僾儘僌儔儉憖嶌偺栤戣丅丂傕偆堦偮偼巔惃愝掕偺僐儞僩儘乕儔憖嶌壔丅
儔儉僟偺僐儞僩儘乕儔RPU-100偼NetBSD偲偄偆UNIXOS偑忔偭偰偄傞丅丂OS傪巊偆偭偰偺偼暋嶨側僾儘僌儔儉傪張棟偡傞偵偼偄偄偺偱偼偁傞偑婲摦偑戝曄偱丄僀儀儞僩偱偼揹尮傪擖傟偨傝愗偭偨傝塣塩偲偺寭偹崌偄傕偁偭偰撍敪揑側忬嫷偑懡偔偁傞偺偩偑丄UNIXOS偩偲偙傟偑旕忢偵晄曋丅丂OS偑棫偪忋偑傞偺偵悢暘偐偐傞偟丄偪傖傫偲愝掕偟偰偍偐側偗傟偽儘儃僢僩偺僐儞僩儘乕儖僾儘僌儔儉偺婲摦傪峴偆偨傔偵偄偪偄偪僐儞僜乕儖偱僐儅儞僪傪擖傟側偗傟偽側傜側偄丅
崱夞偼丄揹尮傪擖傟偰丄OS偑棫偪忋偑傞偲弶婜愝掕僗僋儕僾僩忋偱儔儉僟偺僐儞僩儘乕儖僾儘僌儔儉傪婲摦偡傞傛偆偵僙僢僩偟偰偍偄偨丅丂晛抜偼僾儘僌儔儉傪RAMDISK忋偵儘乕僪偟偰摦嶌偝偣傞偺偩偑丄CF僇乕僪忋偺僼儔僢僔儏儊儌儕乕偐傜婲摦偡傞傛偆偵偟傑偟偨丅丂傕偪傠傫奺庬愝掕僼傽僀儖乮婎杮僐儞僼傿僌丄僇儔乕僥乕僽儖僼傽僀儖丄儌乕僔儑儞僼傽僀儖丄價僿僀價傾僼傽僀儖側偳側偳乯傕僼儔僢僔儏儊儌儕乕偵僙乕僽偟偰偍偄偨丅
慡偰僙僢僩偟偰峴偭偨偺偩偑丄夛応偵峴偭偰偐傜挷惍傪峴偭偨傝偟偨偺偱偦偺搒搙僼傽僀儖偺峏怴傪偟偨丅丂僷僀儘儞偺僇儔乕僥乕僽儖挷惍傪峴偭偨偺偱丄僇儔乕僥乕僽儖僼傽僀儖傪峏怴偟丄儃僩儖僩儔僋僔儑儞梡偵曕峴巔惃愝掕僼傽僀儖傪峏怴偟丄嵟屻偵偼僾儘僌儔儉杮懱偵傕廋惓傪壛偊偰峏怴偟偨丅
梡堄偟偰偄偭偨忬嫷偱崲偭偨偺偑丄挷惍抜奒偱丄揹尮傪擖傟偨傜摦嶌僾儘僌儔儉偑婲摦偟偰偟傑偆偙偲丅丂傕偪傠傫丄傑偢婲摦偟側偄傛偆偵偟偰偐傜挷惍偡傟偽偄偄偺偩偑丄挷惍偟偰僼傽僀儖傪峏怴偡傞偺偑慜採偱偁傟偽偦傟偱傕偄偄偑丄栤戣側偗傟偽僿僞偵偄偠傝偨偔側偄丅丂偙傝傖挷惍偟側偒傖僟儊偩側乕偲偄偆偙偲偵側偭偰挷惍偡傞傢偗偩偐傜丄傑偢婲摦偟側偄傛偆偵偡傞偭偰偺偼椙偄嶔偲偼尵偊側偄丅
栤戣偼婲摦偟偨僾儘僌儔儉傪廔椆偝偣傞庤抜傪梡堄偟偰偄側偐偭偨偙偲偱丄偄偪偄偪僐儞僜乕儖偱擖偭偰僾儘僙僗傪嶦偟偰丄丄愝掕僼傽僀儖傪RAMDISK忋偵抲偄偰偦傟傪巊偆傛偆偵偟偰丄丄偲偄偆斚嶨側庤弴傪傆傑側偗傟偽側傜側偐偭偨丅
偲偄偆偙偲偱丄僾儘僌儔儉偺掆巭傪僐儞僜乕儖傪巊傢偢偵峴偊傞傛偆偵偡傋偒偐偲巚偆丅丂偱偒傟偽婲摦傕峴偊傞傛偆偵偟偨偄偺偩偑丄娙扨偵偱偒傞偐偳偆偐傢偐傜側偄丅丂RPU-100偵偼墴偟儃僞儞僗僀僢僠偑2偮偁傝丄偙傟傜傪偦偺憖嶌偵妱傝摉偰傞偙偲偑偱偒傞偐偲巚偆偺偩偑丄僨僶僀僗傪暋悢偺僾儘僌儔儉偱憖嶌偡傞偺偼擄偟偔偰丄儔儉僟懁偱僨僶僀僗傪巊偆偨傔丄僾儘僌儔儉婲摦丒掆巭偺儌僯僞乕僾儘僌儔儉偵憖嶌傪搉偣側偄偐傕抦傟側偄丅
傕偆堦偮偺巔惃愝掕偺僐儞僩儘乕儔憖嶌壔偼丄儃僩儖僩儔僋僔儑儞梡偺曕峴巔惃僠儍儞僱儖偼慻傒崬傫偱偍偄偨偺偩偑丄帠慜偵挷惍偱偒側偐偭偨偺偱摉擔夛応偱弶傔偰偐偛傪墴偡偙偲偵側偭偨丅丂寢嬊丄傇偭偮偗杮斣偱偐偛傪墴偡偙偲偵側偭偨偺偩偑丄丂梡堄偟偰偍偄偨曕峴巔惃偼傑偭偨偔偐偛偺戝偒偝偵偁偭偰偍傜偢丄偓傝偓傝傑偱挷惍偡傞塇栚偵側偭偨丅丂儔儉僟偺曕梕惗惉偼寁嶼偱峴偭偰偄傞偺偱丄僷儔儊乕僞愝掕偝偊峴偊偽偦傟側傝偺曕梕傪嶌傞偙偲偼弌棃傞丅丂偨偩丄偦偺挷惍偵偼僐儞僜乕儖傗傜僄僨傿僞傗傜偑昁梫偱丄摉擔偼帺暘偺惾偱抣傪廋惓偟偰偼偐偛偵崌傢偣偰傒偰丄偩傔側傜傑偨惾偵栠偭偰偺孞傝曉偟偩偭偨丅
幚偼偙偺忬嫷偼梊憐偟偰偄偰丄僐儞僩儘乕儔偱曕峴巔惃偺挷惍傪峴偆儌乕僪傪嶌傝偐偗偰偄偨偺偩偑丄帪娫偑懌傝偢丄搑拞偱曻抲偟偰偄偨偺偩丅丂偙偆偄偆偺傕偪傖傫偲巇忋偘偰偍偐側偄偲偹偉丅
丂
崱擔偼堦擔丄儔儉僟儅乕僋嘦偺峔憿専摙丅丂崪巕偼偱偒偨偺偩偑丄偡傫偛乕偄偐偭偙埆偄丅丂偙傟傎傫偲偵嶌傞偺偐側偀(乕乕;)
仭侾寧侾俋擔仭
RPU-100偺僗僀僢僠僨僶僀僗偑暋悢偺僾儘僙僗偱棙梡偱偒傞偐偳偆偐偺僥僗僩丅
僇儊儔僨僶僀僗偼攔懠偱偟偐巊偊側偐偭偨偺偩偑丄偦偺懠偺僨僶僀僗偼偳偆傗傜暋悢偺僨僶僀僗偱棙梡壜擻偺傛偆偩丅乮傕偪傠傫RS485傕攔懠棙梡昁恵乯丂偙傟偱儌僯僞乕僾儘僌儔儉傪忢挀偝偣偰丄儃僞儞傪墴偟偨傜僾儘僌儔儉偺婲摦傪偡傞偭偰憖嶌偑弌棃偦偆偩丅僾儘僙僗憹傗偟偰偄偄偺偐側偭偰婥傕偡傞偑丄CPU愯桳帪娫傪偆傫偲抁偔偡傟偽塭嬁偼柍偄偩傠偆丅
丂
儔儉僟儅乕僋嘦偺峔憿丄丂偪傚偭偲尒捈偟丅丂偐偭偙埆偝偼偪傚偭偲偩偗尭偭偨偑丄傑偀偙傟偼抳偟曽側偄偐側偀丅
壗傪傗傠偆偲偟偰偄傞偐偲偄偆偲丄懌偺枛抂幙検偺寉尭偲崉惈偺岦忋丅丂儔儉僟偑偄傑偄偪偟傖偒偭偲偟側偄偺偼僷儚乕僂僃僀僩儗僔僆偺栤戣偑戝偒偄偺偱偼側偄偐偲峫偊偰偄傞丅丂崱偺愝寁偼丄偱偒傞偩偗恎挿傪掅偔嶌傝偨偐偭偨偨傔丄幙検傪暘嶶偝偣傛偆偲偟偰偄偨偺偩偑丄搢棫怳巕偺塣摦傪嵦梡偡傞側傜枛抂幙検偼榑棟揑偵偼僛儘側傢偗偱丄懌愭偑廳偄偺偼旕忢偵椙偔側偄丅ZMP婯斖偺惂屼傪偟偨偲偟偰傕枛抂幙検偑彫偝偄曽偑偄偄偩傠偆偲偄偆偙偲丅丂傑偀婎杮側偺偱偡偑丄儔儉僟傪愝寁偟偨偲偒偼側傫偲偐側傞偲巚偭偰偄偨傢偗偱偡丅
杮奿揑側師婡庬偼堘偆僒乕儃偺嵦梡傪峫偊偰偄傞偺偩偗偳丄崱偺嵽椏偱夵慞偺栚埨傪偮偗偰偍偒偨偄丄偲偄偆偙偲偱偡丅
夵慞偱偒偨傜偄偄側偀丅
仭侾寧俀俆擔仭
愭廡偼夛幮偱僀儞僼儖僄儞僓偑戝棳峴丅丂寧梛擔偵夛幮偵峴偔偲廃傝偩偗偱係恖偑昦寚丅偆偪俀柤偼僀儞僼儖僄儞僓丅丂偦偟偰嬶崌偺埆偄偺偑侾柤偱丄偡偖偵憗戅偟偰昦堾偵峴偔偲傗偼傝僀儞僼儖僄儞僓丅丂峏偵晽幾怽崘偺俀柤偵昦堾偵峴偔傛偆偵尵偆偲丄侾柤偼堿惈偩偭偨傫偩偗偳丄傕偆侾柤偼僀儞僼儖僄儞僓丅丂(>_<)
傕偆偙偆側傞偲丄廃傝傪尒搉偡偲僀儞僼儖僄儞僓僂傿儖僗偑尒偊偦偆側惃偄偱丄帺暘傕嬶崌埆偔側偭偰偒偨丅
峏偵栘梛擔丄憗戅偟偨侾柤偺椬偵嵗偭偰偄偨侾柤偑僀儞僼儖僄儞僓敪昦丅丂偳傫偩偗姶愼椡偁傞傫偩傛両丂偦偄偮偲偼壩梛擔堦弿偵堸傒偵峴偭偪傖偭偨傫偩偗偳丄敪昦偡傞慜側傜僂傿儖僗偽傜嶵偄偰偄側偄偼偢丅
寢嬊丄寧梛擔偵媥傫偩僀儞僼儖係柤偼慡堳媔墝幰丅乮堿惈偩偭偨1柤傕媔墝幰乯丂僆僼傿僗價儖偼婎杮嬛墝偱丄媔墝偡傞偺偼彫偝側媔墝儖乕儉偺傢偗偱丄偨偩偱偝偊柶塽椡偑棊偪偰偄傞媔墝幰偑彫晹壆偱堦惗寽柦懅媧偭偰揻偄偰偄傞傢偗偩偐傜姶愼偡傞偺傕偆側偢偗傞丅
偪側傒偵媔墝幰側偺偵姶愼偟側偐偭偨恖偑堦恖偩偗丅丂偦偄偮偼挿抝偑崱擭庴尡偩偭偰偙偲偱壠懓慡堳梊杊愙庬傪庴偗偰偄偨偺偱偟偨丅丂崱擭偼儚僋僠儞奜傟偭偰暦偄偰偨偗偳岠偄偨偺偐側丅
丂
俀係擔偼ROBO-ONE僥僋僯僇儖僇儞僼傽儗儞僗偩偭偨傫偱偡偹丅慡慠僲乕儅乕僋偱抦傜側偐偭偨丅丂偍戣偑偍庤揱偄僾儘僕僃僋僩偩偭偨偐傜傑偀傛偐偭偨偐側偀偲丄偨偩栐栰偝傫偺僾儗僛儞暦偒偨偐偭偨側丅
丂
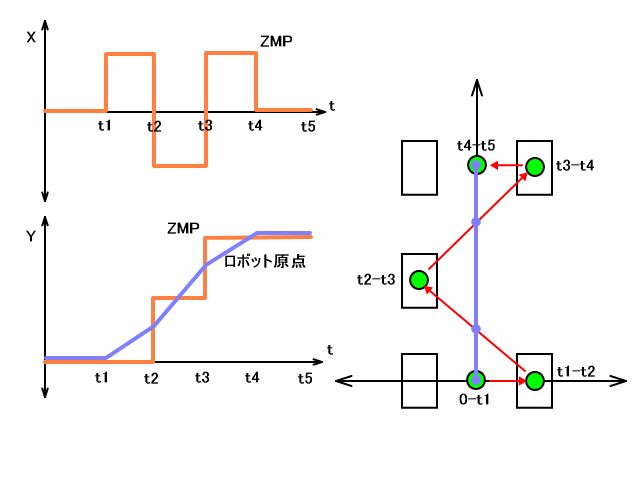
崱屻偺儘儃僢僩奐敪偺妶摦寁夋傪峫偊傞偺偵丄儔儉僟偺曕峴夵慞偑戝偒側僥乕儅丅丂壓敿恎偺峔憿曄峏偑戝偒側壽戣側偺偱偡偑丄惂屼曽幃傕儚儞儔儞僋傾僢僾偝偣偨偄丅丂嬤崰丄晛捠偺夛幮堳偺擔婰偺惣偝傫偑ZMP婯斖偺曕峴惗惉偱戝偒側惉壥傪忋偘偰偍傜傟傑偡偑丄儔儉僟偺曕峴傕搢棫怳巕婳摴偺嵞惗偐傜ZMP婯斖偺曕峴偵堏峴偟偰偄偙偆偐偲巚偄傑偡丅
偦傕偦傕ZMP婯斖傕搢棫怳巕傕娷傔偨摦椡妛寁嶼偵傛傞曕峴惗惉偠傖側偄曽朄偱曕偐偣偨偄側偲巚偭偰墦夞傝偟偨偺偱偡偑丄僙儞僒乕偑彮側偄尰嵼偺僷乕僜僫儖儘儃僢僩偩偲傗偼傝摦椡妛傪巊偭偰惂屼偡傞偺偑堦斣偺傛偆偱偡丅丂搢棫怳巕偼捈姶揑偵棟夝偟傗偡偐偭偨偺偲丄夝愅夝偑偁偭偨偺偱寁嶼検偑彮側偔偰偄偄偐傜傑偀偙傟偱偄偄偐偲巚偭偰偄偨偺偱偡偑丄搢棫怳巕婳摴偼弶懍搙偑偱偐偄偺偱丄傗偼傝僒乕儃偺僷儚乕偲偐嵞惗惛搙偱栤戣偑偁傞偲偄偆偺偑寢榑偱偡丅丂摦椡妛巊偭偰傞偔偣偵寁嶼検尭傜偦偆偭偰偺偑拵偺偄偄榖偩偭偨傫偱偡偹丅
偦偺懠偵傕懌峔憿偺尒捈偟傗傜丄巔惃嵞惗偺曗惓庤抜傗傜愜傝崬傒偨偄帠偑偁傞偺偱偡偑丄儔儉僟儅乕僋嘦偺峔憿専摙傪偟側偑傜丄ZMP婯斖偺曕峴惗惉傗傜巔惃嵞惗偺曗惓傗傜傪僾儘僌儔儉偟偰儅乕僋嘥婡懱偱幚尡偟偰偄偔偭偰姶偠偺恑傔曽偵側傞偐側偀偲巚偭偰傑偡丅
惣偝傫乮偲撻傟撻傟偟偔偍屇傃偟偰偄傑偡偑柺幆偼偁傝傑偣傫丅僗僀儅僙儞(^^乁乯偑僽儘僌偱徯夘偟偰偍傜傟偨丄嶰廳懳妏楢棫曽掱幃偺夝朄傪夝愢偟偰偄傞儁乕僕傪嶲峫偵偟偰丄僆僼儔僀儞曕峴僷僞乕儞偺惗惉傪傗偭偰傒傑偟偨丅丂偪側傒偵偙偺儁乕僕偺悢幃偼寢峔側娫堘偄偑偁傝傑偡偺偱拲堄偑昁梫偱偡丅悢妛棟榑偼偝偭傁傝敾傝傑偣傫偑丄傗偭偰偄傞偙偲偼暋嶨偱偼側偄偺偱弴傪捛偭偰帺暘偱寁嶼偟偨曽偑偄偄傒偨偄偱偡偹丅
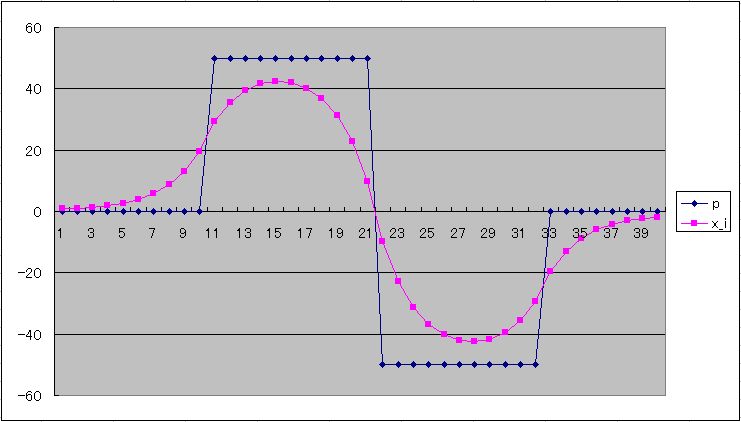
嵁怓偑栚昗ZMP偱愒怓偑廳怱婳摴偱偡丅柺敀偄偱偡偹乕丅丂杮傪幬傔撉傒偟偰偄傞偲偒偼傛偔棟夝偱偒傑偣傫偱偟偨偑丄悢幃傪弴傪捛偭偰寁嶼偟偰傒傞偲側傞傎偳側傞傎偳偲偄偆姶偠偱偡丅
栚昗ZMP偺婳摴乮偲偄偭偰偄偄偺偐側丠乯傪棧嶶壔偟偰悢楍偵偟傑偡丅偙偺悢楍傪峴楍 P 偲偟丄偙傟偑惉傝棫偮棧嶶壔偝傟偨廳怱嵗昗楍傪峴楍 X 偲偟傑偡丅偙偺娭學傪惉傝棫偨偣傞峴楍傪峴楍 A 偲偟偰
P=A丒X
偙傟傪夝偄偰X傪媮傔傟偽偄偄傢偗側偺偱偡偑丄偦偺偲偒偺峴楍 A 偑嶰廳懳妏峴楍偵側傞傛偆偵ZMP曽掱幃傪棧嶶壔嬤帡幃偵偟偰偄傞傢偗偱偡丅
嶰廳懳妏楢棫曽掱幃傪夝偔帪偵LU曄姺偲偄偭偰丄峏偵娙扨側2偮偺峴楍偵暘夝偟傑偡丅
A=L丒U
偙傟傪慜幃偵戙擖偟偰
P=L丒U丒X
偙傟傪丄夝偔偺偵Z偲偄偆拞娫偺峴楍傪峫偊偰丄
Z=U丒X
偦偟偰丄
P=L丒Z
偲偟傑偡丅L偼娙扨側峴楍側偺偱丄L偺媡峴楍傪寁嶼偟側偔偲傕Z傪媮傔傞偙偲偑弌棃傑偡丅丂偦偟偰丄忋偺Z=U丒X傪摨條偵寁嶼偡傟偽X傪媮傔傞偙偲偑偱偒傑偡丅
Z傪媮傔傞偲偒偼 i=1偐傜値偵岦偐偭偰媮傔偰峴偒丄X傪媮傔傞偲偒偼媡偵i=n偐傜1偵岦偐偭偰掕傑偭偰峴偔條巕偑側偵傗傜栚昗ZMP偵岦偐偭偰偄偔條傪昞偟偰偄傞傛偆偱柺敀偄偱偡偹丅
乽僸儏乕儅僲僀僪儘儃僢僩乿偱偼偙偺嶰廳懳妏楢棫曽掱幃傪夝偔晹暘傪偝傜傝偲棳偟偰偄傑偡偑丄傕偆偪傚偭偲夝愢偟偰偔傟偰偄傟偽傕偭偲晘嫃偑壓偑偭偨偩傠偆偵偲巚偄傑偟偨丅
偙傟偱弶懍搙僛儘偐傜摦嶌傪巒傔偰懍搙僛儘偱摦嶌掆巭偝偣傞偙偲偑偱偒傑偡丅
偝偰丄偙偙傑偱偱扨幙揰偺ZMP婯斖偺廳怱婳摴偼媮傔傜傟偨傢偗偱偡偑丄曕峴儌乕僔儑儞偲偡傞偵偼儘儃僢僩慡懱偺塣摦偵傛傞塭嬁傪曗惓偟側偔偰偼側傝傑偣傫丅傕偆偪傚偭偲椡妛偺曌嫮偑懕偒傑偡丅
忋婰偺僌儔僼偺僄僋僙儖僼傽僀儖傪儕儞僋偟偰偍偒傑偡偺偱嶲峫偵偟偰偔偩偝偄丅
仭侾寧俀俇擔仭
扨幙揰偱偺廳怱揰偺婳摴偑嶼弌偱偒偨偺偱丄師偼懡幙揰儌僨儖傊偺曗惓偱偡丅丂偦偺偨傔偵偼擟堄偺巔惃偱偺ZMP偺嶼弌傪峴偆昁梫偑偁傝傑偡丅丂偙傟偼乽僸儏乕儅僲僀僪儘儃僢僩乿偺俁丏係儘儃僢僩偺塣摦偐傜ZMP傪寁嶼偡傞丂偺晹暘偺寁嶼傪偟傑偡丅
儔儉僟偼婛偵懡幙揰儌僨儖傪帩偭偰偍傝丄娭愡妏搙偐傜偦偺巔惃偱偺惷巭廳怱偺寁嶼傪偱偒傞傛偆偵偟偰偄傑偡丅丂ZMP偺嶼弌傪峴偆偵偼丄儘儃僢僩傪摦偐偡偨傔偺娭愡妏搙楍傪嵞惗偡傞嵺偺丄奺幙揰偺嶰師尦嵗昗偲懍搙儀僋僩儖偲壛懍搙儀僋僩儖偑昁梫偱偡丅妏塣摦検偺塭嬁傕寁嶼偡傞側傜偽丄幙揰偺巔惃偲妏懍搙儀僋僩儖傕昁梫偲側傝傑偡丅偁偲丄幙揰偺幙検偲姷惈僥儞僜儖偑梫傝傑偡丅
僀儞儀儞僞乕偺暔棟検寁嶼偺婡擻偱丄姷惈僥儞僜儖偺嶼弌偼偱偒傞偺偱偡偑丄巔惃偐傜妏懍搙傪媮傔傞寁嶼偑傢偐傝傑偣傫丅(>_<)丂僶僀僽儖偵傛傞偲丄妏塣摦検偺寁嶼偼偟側偔偲傕幚梡偵偼懴偊傞偲傕彂偄偰偁傞丅丂
妏塣摦検傪峫椂偟偰偄傞丂乽俁丏係丏侾丂ZMP偺摫弌乿丂偺嵟屻偺幃偲丄妏塣摦検傪峫椂偟偰偄側偄乽俁丏係丏俀丂嬤帡偵傛傞ZMP寁嶼乿偵弌偰偔傞幃偱偼昞婰儗儀儖偵嵎偑偁傞丅丂偙傟偼偳偆傗傜撉幰偵偼俁丏係丏俀偺曽傪慐傔偰偄傞傛偆偵尒偊傞側偀丅
偱偼偍尵梩偵娒偊偰嬤帡幃偺曽偱恑傔傞偙偲偵偟傑偡丅
幃3.71丄幃3.72丂偵幃3.75傪戙擖偟偨傜幃3.76丄幃3.77偵側傞偭偰彂偄偰偁傞偺偩偑丄偁傟丠揥奐偟偰傕崌傢側偄丅
偙傟偼師偺儁乕僕偺幃3.81傪嶲徠偡傟偽揥奐偟偰寁嶼偑偁偆偺偑傢偐傝傑偡丅
L=們亊P
偲側偭偰偄傞偺偱
L={Lx,Ly,Lz}丂丂丂c={cx,cy,cz]丂丂丂P=乷Px,Py,Pz乸
偲偟偰丄偆偭偐傝偲
Lx=cx亊Px
偲偟偰偟傑偭偰偄傑偟偨丅亊偼愊偠傖側偔偰奜愊乮儀僋僩儖愊乯傪偁傜傢偟偰偄傞傫偱偡偹丅
妏塣摦検偼埵抲儀僋僩儖偲懍搙儀僋僩儖偺奜愊側偺偱偭偰偄偆偺偑惓偟偄昞尰偐傕偟傟側偄偱偡偗偳丄椡妛偵姷傟恊偟傫偱偄側偄偺偱捈姶揑偵敾傝偵偔偄偱偡丅丂妏塣摦検儀僋僩儖偺梫慺偼偦偺嵗昗幉廃傝偺夞揮塣摦偺戝偒偝傪昞偟偰偄傞偺偱丄Lx偼X幉偐傜cy棧傟偨偲偙傠偱Pz偺椡偱夞揮偡傞椡偲丄們倸偼側傟偨偲偙傠偱-Py偺椡偱夞揮偡傞椡偺崌寁側偺偱
Lx=cy亊Pz-cz亊Py
偲側傝傑偡丅
杮偺慜偺曽偵偼奜愊偺榖傕弌偰偔傞傫偱偡偗偳丄乮偦偙偱偼奜愊偼丂丱丂偱昞偟傑偡偭偰彂偄偰傞乯丂傕偆偪傚偭偲傂偮偙偔愢柧偟偰梸偟偐偭偨偐側乕丅丂棟夝偟偰偄傞偮傕傝偩偭偨傫偱偡偗偳丄恎偵偮偄偰偄側偄傕傫偩偐傜偡偭偐傝娫堘偊偰偟傑偄傑偟偨丅
偪側傒偵幙揰偺懍搙偼慜僼儗乕儉偲偺嵗昗偺嵎傪庢偭偰僼儗乕儉娫帪娫乮嚈倲乯偱妱傞丅丂幙揰偺壛懍搙偼慜僼儗乕儉偲偺懍搙偺嵎偱偡丅丂妏懍搙偼丄丄夞揮峴楍偐傜嶼弌偡傞傒偨偄偱偡偗偳傑偩傢偐傜傫偱偡丅
丂
僾儘僌儔儉彂偔偮傕傝偑擔帍彂偄偰偨傜帪娫偵側偭偰偟傑偭偨丅(>_<)丂杮枛揮搢偩丅丂偊偊偲丄昞尰傗棟夝偵岆傝偑偁偭偨傜偤傂嫵偊偰偔偩偝偄丅
仭侾寧俀俈擔仭
崱擔偼巆嬈丄柧擔偼憗挬偐傜戝嶃傊弌挘丂(乕乕;)
乽懡幙揰儌僨儖偺ZMP摫弌乿偺僾儘僌儔儉偑拝庤弌棃側偄乣丅
儔儉僟偺帩偭偰偄傞懡幙揰儌僨儖偱偺廳怱寁嶼偼丄惷巭廳怱偺寁嶼傪偡傞偨傔偵巐巿偺愭抂偐傜崻尦偵岦偐偭偰幙検傪崌惉偟偰偄偔嶌傝偵側偭偰偄偨偺偱丄幙揰偦傟偧傟偺巔惃傗嵗昗傪寁嶼偡傞偲側傞偲丄僗僉儍儞曽朄傪曄峏偟側偒傖側傜側偄偐傕丅丂偁傟丠姷惈儌乕儊儞僩偺寁嶼偼偳偆偟偰偄偨偭偗丠
偊偊乣偲丄姷惈儌乕儊儞僩偺寁嶼儖乕僠儞偑偦偺傑傑巊偊傟偽偪傚偄偲庤傪壛偊傞偩偗偱弌棃偦偆側姶偠偩側丅丂憗偔寁嶼偟偰傒偰扨幙揰偱偺栚昗ZMP偲懡幙揰偱偺ZMP偺嵎暘傪尒偰傒偨偄丅
柧擔偺婣傝偺怴姴慄偱丄偁傑傝價乕儖傪堸傑側偄偱婣偭偰偙傟偨傜柧擔偱偒傞偐傕丅(^_^;)丂柍棟偐丅丅丅丂(^丒^)
仭侾寧俀俋擔仭
嶐擔丄戝嶃偐傜怴姴慄偵偺偭偨偺偑丄19帪19暘丂怴墶昹偵拝偄偨偺偑21帪30暘丅丂價乕儖偼堸傫偩偗偳偝傎偳偱傕側偄偺偱婣偭偨傜僾儘僌儔儉乣侓丂偲巚偭偰墶昹慄儂乕儉偵峴偔偲丄丄丂側傫偩偐偍偐偟側條巕丅丂揹幵屘忈偱慡慄僗僩僢僾丅
搶墶慄偵忔傝姺偊傞偐傜偍椬偺媏柤傑偱峴偗傟偽傛偄偺偩偑丄摦偔婥攝偑側偄丅丅丂墶昹巗抧壓揝偱塈夞偡傞婥偵傕側傟側偄偺偱丄30暘傎偳懸偭偨偺偩偗偳丄掹傔偰堸傒偵峴偔偙偲偵偟傑偟偨丅(^^乁
1帪娫傕偡傝傖偀摦偔偩傠偆偲巚偭偨傜丄丄丄丂11帪20暘偔傜偄偵儂乕儉偵峴偔偲丄傑偩摦偐側偄條巕丅丂偁傜傜傜傜丄掹傔偰墶昹巗抧壓揝偱塈夞偟傑偟偨丅偙傫側偙偲側傜偝偭偝偲塈夞偟偰婣傟偽傛偐偭偨丅丂晲憼峚岥傑偱弌偰撿晲慄偵忔傝姺偊傞偺偩偗偳丄丂偁偞傒栰偐傜揷墍搒巗慄偵忔偭偨傜丄崱搙偼乽廰扟偱恖恎帠屘敪惗乿丂側丄側偵偂乣丄丄撿晲慄廔揹傗偽偄傗乕傫丅
偪傚偭偲偁偣偭偨偗偳丄掱側偔摦偒弌偟傑偟偨丅丂擇巕嬍愳墍傑偱偼峴偭偰偔傟傞傜偟偄丅丂傛偐偭偨乣丅
偱傕丄婣偭偨傜傕偆12帪傕夞偭偰偟傑偭偰偄偨偺偱偝偡偑偵僾儘僌儔儉偼弌棃傑偣傫偱偟偨丅
丂
偦偟偰丄崱擔丅丂崱擔傕巆嬈偱抶偐偭偨偺偩偗偳丄崱擔偙偦偼懡幙揰傕弌傞偺ZMP摫弌傪僾儘僌儔儉丅丂偦偺慜偵僱僢僩弰夞傪丅丅丅丂偍偋偋乣丄乽晛捠偺夛幮堳偺擔婰乿偑峏怴偝傟偰傞偧丅偳傟偳傟丄丄丄丂偲尒偵峴偭偨傜丄丄丄丄惣偝傫偙偙尒偰偔傟偰傞傫偱偡偹丅(*^_^*)丂偁傝偑偲偆偛偞偄傑偡丅
偙側偄偩偺娭搶儘儃僢僩楙廗夛偼擭枛偱丄梊掕偑偳偆偟偰傕崌傢側偔偰峴偗側偐偭偨傫偱偡傛偹乣丅巆擮偱偟偨丅丂戝掞偼嶲壛偟偰偄傞偺偱婡夛偑偁傟偽偍夛偄偱偒傞偲巚偄傑偡丅
偱丄ZMP摫弌丅
廳怱娗棟僋儔僗偺Gravity偵GetZMP乮乯偭偰娭悢傪嶌偭偰偪傚偪傚偄偲嶌偭偰傒傑偟偨丅丂偁傞巔惃偱偺擟堄幉偺姷惈儌乕儊儞僩傪寁嶼偡傞GetMOI乮乯傪夵憿偟傛偆偲巚偭偨偺偩偗偳丄偙傟傑偨柇側偙偲傪偟偰偄偨偺偱丄暿暔偱慺捈側姶偠偱嶌傝傑偟偨丅
偝偀摦偐偟偰僨僶僢僌偩乕丄偲巚偭偨偺偩偑丄僨僶僢僌偡傞偨傔偵怘傢偣傞僨乕僞傪嶌傞僾儘僌儔儉傪嶌偭偰側偐偭偨丅丂偰偐丄廳怱婳摴偺惗惉傕僄僋僙儖忋偱嶌偭偨偩偗偱丄儔儉僟忋偱偼嶌偭偰側偐偭偨傫偩偭偨丂(>_<)
弴斣偑媡偩偗偳丄懡幙揰儌僨儖偱偺ZMP摫弌娭悢偺僐乕僨傿儞僌偼弌棃偨乮枹僨僶僢僌乯偺偱丄師偼扨幙揰偺栚昗ZMP傊偺廳怱婳摴惗惉晹偲丄儘儃僢僩偺巔惃惗惉偺僐乕僨傿儞僌偱偡丅(^^乁
傑乕偙傟偼偲偭偐偐傟偽偡偖偱偡偹丅丂偲偭偐偐傟傞偐偳偆偐偑栤戣丅
柧擔傕婣傞偺抶偦偆側偺偱搚擔偵撍擖偟偪傖偆偐側偀丅
仭侾寧俁侾擔仭
嶐擔偼巚偭偨傛傝憗偔婣偭偰偒偨偺偱栚昗ZMP傊偺廳怱婳摴惗惉偺娭悢傪嶌偭偰傑偟偨丅丂僄僋僙儖偱偼X曽岦偩偗嶌偭偰傑偟偨偑曕偐偣傞偵偼Y曽岦傕昁梫偲偄偆偙偲偱椉曽堦弿偵寁嶼偡傞娭悢傪嶌惉丅
懡幙揰儌僨儖偼帺嶌僋儔僗傪偨偔偝傫巊偭偰偄傞偺偱丄側偵傗偭偰傞偐敾傝偵偔偄偐傜僜乕僗峀偘偰傕堄枴側偄偐偲巚偄傑偟偨偑丄偙偭偪偺曽偼偦偆偄偆偙偲傕側偄偺偱嵹偣偰傒傑偡丅僄僋僙儖僼傽僀儖偱偼悢幃偺揥奐庤弴傪偦偺傑傑寁嶼偟偨偺偱柍懯側晹暘傕懡偐偭偨偺偱偡偑丄僾儘僌儔儉偵偡傞偲娭學側偄偲偙傠偼嬌椡徣偄偰彂偄偰傑偡丅C++偱STL傕巊偭偰偄傑偡偗偳娙扨側婡擻偟偐巊偭偰偄側偄乮帺暘偑巊偊側偄偺偱(^^乁丂乯偺偱側傫偲側偔偼敾傞偺偱偼側偄偐側偀偲丅
偙偺寁嶼偭偰丄儚乕儖僪嵗昗忋偱偺寁嶼偵側傞偺偱丄曕偒懕偗傞偵偼偪傚偭偲岺晇偑昁梫丅巭傑傜偢偵僇乕僽曕峴偵堏峴偟偨傝偡傞働乕僗傕峫偊側偗傟偽側傜側偄丅
偝偰丄師偼偙偺廳怱婳摴傪尦偵儘儃僢僩巔惃傪惗惉偟偰丄懡幙揰儌僨儖偱ZMP傪摫弌偟偰傒傑偡丅
仭俀寧侾擔仭
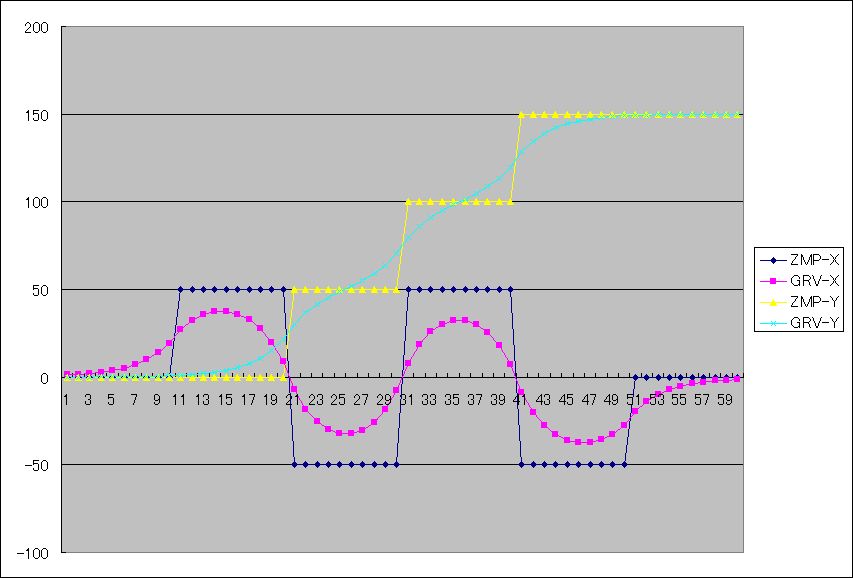
傗偭偲偱偒偨乣丂(>_<)
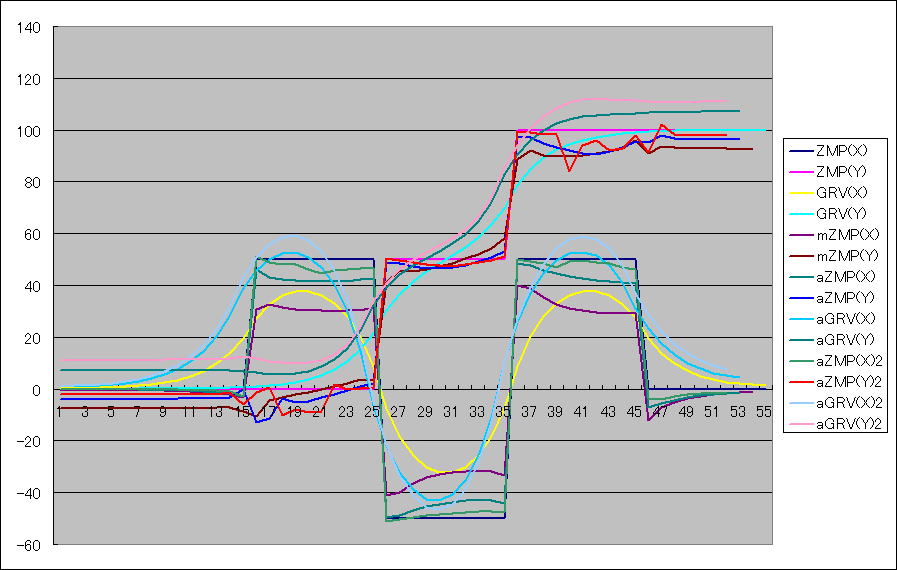
懡幙揰儌僨儖偱偺ZMP摫弌偱偡丅丂僌儔僼拞偺倣ZMP偭偰偺偑懡幙揰儌僨儖偱偺ZMP偺摫弌寢壥偱偡丅嫵壢彂乮僸儏乕儅僲僀僪儘儃僢僩偺偙偲乯偱偼儘儃僢僩偺慜恑曽岦偑X幉偱丄嵍塃偑Y幉側傫偱偡偑丄儔儉尋偱偼嵍塃偑X幉偱慜屻Y幉偱偡丅
幚偼傑偩曕峴儌乕僔儑儞偵側偭偰側偔偰丄崢傪嵍塃偵怳偭偰偄傞偩偗偱丄懌摜傒偝偊偟偰偄傑偣傫丅丂側偺偱丄Y幉乮慜屻曽岦乯偼廳怱揰偺僘儗偵傛偭偰惗偠傞儌乕儊儞僩偱ZMP偵僘儗偑弌偰偄傞傛偆偱偡丅
僐乕僨傿儞僌偼偪傚偪傚偄偲嶌偭偨偗偳丄僨僶僢僌偼偪傚偪傚偪傚偪傚乕乕乕乕乕偄丄偔傜偄偐偐傝傑偟偨丅(乕乕;)
偼偠傔丄儘儃僢僩偺尨揰傪屌掕偟偨傑傑偱懌偑摦偔傛偆側寁嶼傪偟偰偟傑偄丄偟偽傜偔偼傑偭偰偟傑偄傑偟偨丅丂偁丄偭偲婥晅偄偰廋惓偡傞偲偒丄壗傪姩堘偄偟偨偺偐廳怱揰偺旝暘抣傪奺幙揰偵壛偊偰偟傑偭偰峏偵僴儅儕傑偟偨丅丂儘儃僢僩偺巔惃娭學偼儘乕僇儖嵗昗偱娗棟偟偰偄傞偺偱偡偑丄偙偺堦楢偺寁嶼偼儚乕儖僪嵗昗側偺偱丄偡傋偰儚乕儖僪嵗昗偵曄姺偟側偗傟偽側傜側偄偺偱偡丅丂傗傟傗傟偩偤丅丅
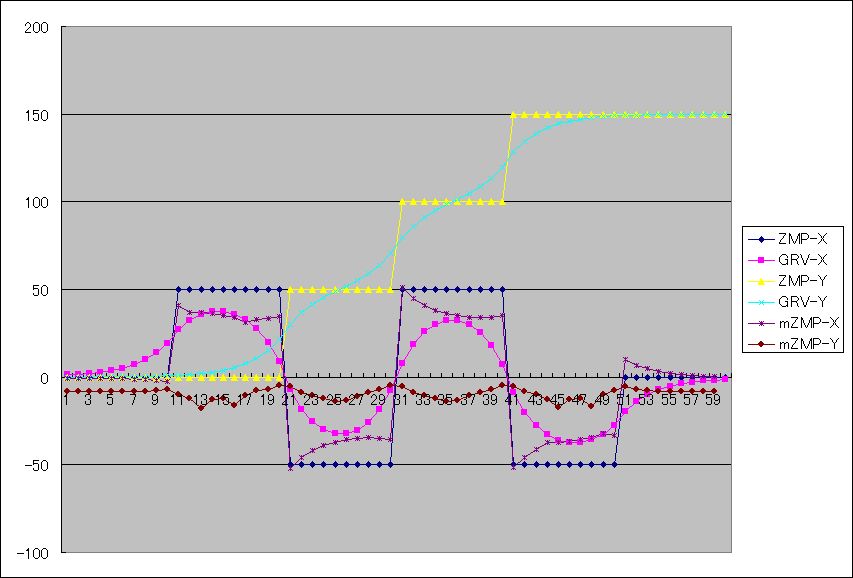
偪側傒偵僴儅偭偰偄傞嵟拞偵嶌偭偰傒偨扨幙揰偱偺ZMP摫弌偑偙傟伀
嚈倲傕彫偝偔偟偰傒傑偟偨丅丂堄奜偲僘儗偑戝偒偄偱偡丅廳怱婳摴偺寁嶼傕ZMP偺寁嶼傕嬤帡偑偁傞偐傜巇曽側偄偺偩傠偆側丅
仾仸廳怱婳摴嶼弌帪偲丄ZMP嶼弌帪偱廳怱崅偝偵堘偆抣傪巊偭偰傑偟偨丅丂偢傟偑戝偒偄偺偼偦偺偨傔偺傛偆偱偡丅乮2009.2.1乯
丂
偝偰丄師偼曗惓偱偡丅丂惣偝傫偼1夞偱廫暘偲彂偄偰偍傜傟傑偟偨偑丄儔儉僟偼慡恎側偺偱丄岆嵎偑戝偒偄傛偆側婥傕偟傑偡丅偳偆側傞偐妝偟傒丅
懡幙揰儌僨儖偱偺ZMP摫弌偺娭悢傕嵹偣偰傒傑偟傚偆丅丂撈帺僋儔僗傪巊偭偰偄傞偺偱偦偺曈傝偼姶妎偱撉傫偱偔偩偝偄丅(^^乁丂幙栤偼桳傝偱偡偺偱BBS傑偱丅
丂
挬偵側傝傑偟偨丅丂偙偺傑傑曗惓偵撍擖偟偨偄偲偙傠側傫偱偡偑丄恑峴曽岦偺寁嶼偑慡慠偱偒偰偄側偄偺偱曕峴惗惉偵偮偄偰偺専摙傪偟傑偡丅
栚昗ZMP偺婳摴偲丄懌偺埵抲媦傃儘儃僢僩尨揰偺娭學傪恾偲僌儔僼偵偟偰傒傑偟偨丅丂嵍偺嵗昗恾偺椢偺娵偑ZMP偺埵抲偱偡丅丂栚昗ZMP偼彴柺傪揰乆偲堏摦偟偰偄偒傑偡丅愒偄栴報慄偑堏摦偺弴傪帵偟偰偼偄傑偡偑丄偙偺愒偄慄忋偵栚昗ZMP偑懚嵼偡傞偲偄偆堄枴偱偼偁傝傑偣傫丅
巼偭傐偄怓偺慄偑儘儃僢僩尨揰偺婳愓偱偡丅儔儉僟偺巔惃偱偼丄儘儃僢僩尨揰偼忢偵椉懌偺拞揰偵偁傝傑偡丅偦偙偐傜偢傟傞暘偼僆僼僙僢僩僷儔儊乕僞側偳偱昞尰偟偰偄傑偡丅捈恑偵曕峴偡傞応崌丄儘儃僢僩尨揰偼忢偵Y幉忋偵偁傞偙偲偵側傝傑偡丅
栚昗ZMP偐傜媮傔偨廳怱婳摴偱偼Y幉偺摦偒乮慜屻偺摦偒乯偼丄傎傏捈慄偩偗偳丄柆摦偟偰偄傞姶偠偱偟偨丅丂偁偺婳摴傪偦偺傑傑儘儃僢僩尨揰偺摦偒偵偡傞偙偲傕偱偒傞偺偱偡偑丄梀媟婳摴傪峫偊偨応崌丄帪娫偵懳偟偰儕傾儖側摦偒偵側傞傛偆偵偟偨曽偑偺偪偺偪峫偊堈偄偲巚偄丄儘儃僢僩尨揰偺摦偒偼儕僯傾偵偟偰丄廳怱埵抲偼僆僼僙僢僩偱梌偊傞偙偲偵偟傑偡丅
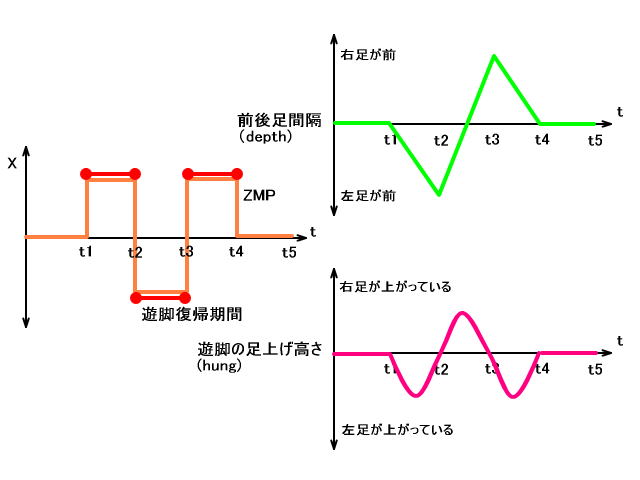
梀媟傪忋偘傜傟傞偺偼ZMP偑巟帩媟懁偵偁傞娫偱偡丅愒偄儔僀儞晹暘偑梀媟暅婣婜娫偲側傝傑偡丅
偦偟偰丄梀媟暅婣摦嶌偱偡偑丄儔儉僟偺巔惃僷儔儊乕僞偱昞偡偲丄慜屻偺懌娫妘偲懌忋偘崅偝偵側傝傑偡丅丂偙傟偼棟憐揑側摦偒偱丄椉懌巟帩婜偑側偄偺偱偡偑丄幚嵺偵偼懌忋偘崅偝偑侽偺帪娫傪悢僼儗乕儉愝偗傞昁梫偑偁傞偲巚偄傑偡丅
丂
傗偭偲偙偝偱曕峴僷僞乕儞偑偱偒傑偟偨丅丂側傫偲偐旤偟偄僀儞僾儕傪峫偊偰偄偨傜偁偭偲偄偆娫偵梉曽偵側偭偰偟傑偭偨丅丂寢嬊偼傂偲傑偢傋偨彂偒偵嬤偄僥僗僩愱梡偺曕峴僷僞乕儞偱偡丅懌忋偘僇乕僽偼扨弮偵僒僀儞僇乕僽傪巊偄傑偟偨丅
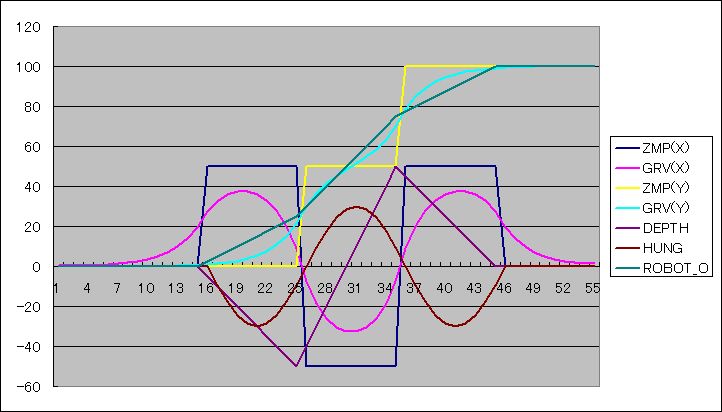
偛偪傖偛偪傖偟偨僌儔僼偱偡偑丄屵慜拞偵彂偄偨梀媟塣摦偑嵞尰偱偒偰偄傑偡丅 偦偟偰丄偙偺摦偒傪偝偣偨儘儃僢僩偺娭愡塣摦偐傜懡幙揰儌僨儖偱偺ZMP傪寁嶼偡傞偲丄
偙傫側姶偠偱偡丅丂嶐擔偲堘偆偗偳丄嶐擔偺偼偪傚偭偲僷儔儊乕僞傪娫堘偊偰偄偨偐傜懌忋偘偺塭嬁偲偼尵偄愗傟側偄丅
偝偰丄傗偭偲曗惓偵庢傝妡偐傟傑偡丅
丂
曗惓偱偡丅丂嫵壢彂偳偍傝偵傗偭偰傕偆傑偔峴偐側偐偭偨偺偱傾儗儞僕偟偰偆傑偔峴偔傛偆偵偟偰偟傑偄傑偟偨丅丂側偵偐僶僌偑偁傝偦偆側偺偱徻嵶偼傕偆偪傚偭偲専摙偟偰偐傜偵偟傑偡丅
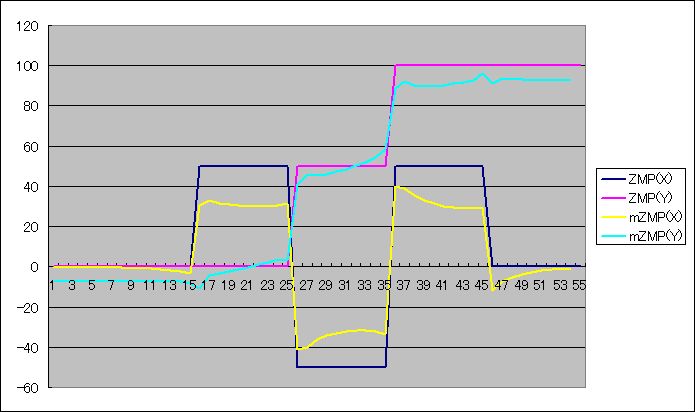
偲偄偆栤戣傪書偊側偑傜傕丄俀夞曗惓傪偐偗偨傜傎傏栚昗ZMP偵嬤偄宍偵側傝傑偟偨丅Y幉偱抣偑朶傟偰偄傞偲偙傠偑偁傝傑偡偑丄廳怱婳摴偼朶傟偰偄側偄偺偱栤戣側偄傛偆側婥偑偟偰偄傞傫偩偗偳丄娒偄偐丠
崱傑偱偺儔儉僟偺曕峴偱偼丄惷巭廳怱傪寁嶼偟偰丄偦偺寢壥偺廳怱偵懳偟偰搢棫慄宍怳巕偺婳摴傪梌偊偰偄傑偟偨丅丂崱夞偺栚昗ZMP偱偼懡幙揰儌僨儖偱偺ZMP摫弌偵偍偄偰摨條偺偙偲傪峴偆偨傔丄儘儃僢僩偺峔憿忋偺榑棟尨揰傪廳怱揰偲偟偰寁嶼偟傑偟偨丅丂Z幉曽岦偩偗偼婎杮巔惃偱偺廳怱崅偝傪峫椂偟偰偄傑偡丅
惷巭廳怱偱丄嵍塃偵-3儈儕丄慜屻偵-11儈儕偔傜偄偺僘儗偑偁傞偺偱偡偑丄偦傟偵嬤偄僆僼僙僢僩偑偱偰偒偰偄傞偺偱傑偀寁嶼偼偁偭偰偄傞偺偐側偀偲巚偄傑偡丅
偨偩丄2夞曗惓偟偨寢壥丄嵍塃怳暆偑ZMP偺傆傝暆傪挻偊偰偄傑偡丅偄偄偺偐側偀丅丂宱尡偱偼墶偵偡偭旘傃偦偆側婥偑偟傑偡偑丅
偙傟偱曕峴偺偨傔偺僨乕僞偼弌棃偨偺偱偡偑丄傑偩曕偐偣傞偙偲偼偱偒傑偣傫丅丂偦傟偼丄娭愡妏搙偺嵞惗惛搙傪忋偘側偗傟偽側傜側偄偲偄偆栤戣偑偁傞偐傜偱偡丅丂偣偭偐偔偙傟偩偗僉僠儞偲寁嶼偟偰傕嵞惗偱偒側偗傟偽偆傑偔曕偗側偄偺偼摴棟丅丂偙傟偵偮偄偰偼傾僀僨傿傾儗儀儖偺傕偺偑偁傞偺偱偦偺僀儞僾儕偲幚尡傪偟側偗傟偽側傝傑偣傫丅丂偆傑偔峴偐側偒傖儔儉僟MARK嘦偵偐偗傞偟偐側偄丅(>_<)
仭俀寧俁擔仭
崱廡偼憗偔婣偭偰偙傟傞擔偑側偝偘側偺偱奐敪嶌嬈偼偱偒側偝偘丅
ZMP婯斖偺曕峴惗惉偼柺敀偄偱偡偹丅丂搢棫怳巕偲偼堘偭偰丄偁傜備傞儌乕僔儑儞偺ZMP曗惓抣傪媮傔傞偙偲偑偱偒傞傢偗偱偡丅丂僒僢僇乕偺僉僢僋儌乕僔儑儞偱丄ZMP傪愝掕偟偰儌乕僔儑儞傪棳偟偰曗惓傪偐偗偨傜懌偺怳傝偵崌傢偣偰廳怱傪摦偐偡傛偆側儌乕僔儑儞偵廋惓偝傟傞偼偢偱偡丅
崱傑偱偺儔儉僟偱偼惷巭廳怱傪摨條偺庤抜偵巊偭偰偄偨偺偩偗偳丄僉僢僋儌乕僔儑儞偺傛偆側戝偒側壛懍搙偑敪惗偡傞摦嶌偵偼岠壥偑柍偐偭偨偺偱偡偑丄ZMP偩偲偦傟偵傕懳墳偱偒傞偼偢丅乮僒乕儃偺墳摎摿惈偑偁傞偐傜側傫偱傕OK偭偰傢偗偠傖側偄偩傠偆偗偳乯
惷巭廳怱偩偗偱傕寢峔曋棙偩偭偨偺偱丄婜懸偱偡丅
丂
懡幙揰儌僨儖偱偺ZMP摫弌傪巊偭偨廳怱婳摴偺曗惓偱丄2夞傑傢偟偰側傫偲偐側偭偨偭偰榖偱偡偑丄惷巭廳怱偺峫椂傪擖傟偰偍偄偨傜1夞偱嵪傓偭偰榖偼側偄偱偟傚偆偐丅丂慜屻偼10儈儕埲忋偺僘儗偑偁傞偐傜嵎暘偑偁傞偱偟傚偆偗偳丄嵍塃偼3儈儕掱搙偟偐側偄偐傜偦傫側偵戝偒側岠壥偼婜懸偱偒側偄偱偡偹乕丅丂偱傕丄巭傑偭偨帪偺巔惃偲偺惍崌傕偁傞偺偱惷巭廳怱偺峫椂偼擖傟偰偍偔傛偆偵偟傛偆偐側丅
嵞惗惛搙偺岦忋偼丄婎杮揑偵偼乽曗惓乿傪偐偗傞偭偰榖側傫偱偡偑丄曗惓僥乕僽儖偭偰偺傪嶌偭偰傒傛偆偲巚偭偰傑偡丅丂偱傕丄曗惓抣偼娭愡偵懳偟偰堦堄側偺偱偼側偔丄娭愡偲丄娭愡妏搙偲妏搙偺堏摦懍搙偲丄偦偟偰婡夿揑僈僞晅偒偵偮偄偰偼妏搙偺壛懍搙偑塭嬁偟傑偡丅丂娭愡妏搙偑曗惓抣偵塭嬁偡傞偭偰偺偼妏搙偺壛懍搙偑塭嬁偡傞偭偰偺偵嬤偔偰丄偮傑傝廳椡壛懍搙偑偳傟偔傜偄塭嬁偡傞偐偭偰榖偱偡丅
峏偵偼丄椺偊偽旼娭愡偩偲丄巜帵媟偺帪偲梀媟偺帪偱偼僼儕乕抂偑媡偵側傞偐傜壛懍搙偺偐偐傝曽傕媡偵側傞傢偗偱丄曗惓抣傕曄傢傝傑偡丅傑丄梀媟偺旼妏搙偼偦傟傎偳廳梫偠傖側偄偐傜偒偵偟側偔偰傕偄偄偐傕偟傟傑偣傫偑丅
仭俀寧俈擔仭
埬偺掕丄愭廡偺僂傿乕僋僨乕偼枅擔婣傞偺偑抶偔乮偲偼尵偭偰傕偆偪俀擔偼堸傒偵峴偭偨偣偄偱傕偁傞偺偩偑乯儘儃僢僩奐敪偼傑偭偨偔偱偒傑偣傫偱偟偨丅
偝偰丄嵞惗惛搙偺岦忋嶔偺専摙偲幚尡偱偡丅丂傑偢偼惷巭忬懺偱偺曗惓傪傒傑偡丅
 丂
丂 丂
丂
嵍偐傜丂曗惓側偟丂曗惓桳傝丂偟傖偑傫偱曗惓桳傝
庡偵旼娭愡偺曗惓偑岠偄偰偄傞偺偩偲巚傢傟傞偑丄曗惓傪偐偗傞偙偲偱摲懱偑悅捈偵側偭偰偄傞偺偑偐傠偆偠偰傢偐傞丅丂幚偼幚尡傪巒傔偨帪丄曗惓傪偐偗偰傕偝偭傁傝摲懱偑悅捈偵側傜側偄偺偱僠僃僢僋偟偰傒傞偲丄屢娭愡偺僽儔働僢僩偑榗傫偱偟傑偭偰偍傝丄偦傟偑尨場偱摲懱偑孹偄偰偄偨傜偟偄丅丂僽儔働僢僩偺傂偢傒傪捈偡傋偒側傫偩傠偆偗偳丄偲傝偁偊偢偼掕媊婰弎偱僽儔働僢僩偺傂偢傒傪惓婯抣偲偍偄偰偟傑偄傑偟偨丅
娭愡妏搙偲曗惓偺條巕傪尒傞偲丄
棫偪巔惃
joint[0] t:0.153589 a:0.153589 diff:0.000000 adj:-8
joint[1] t:-0.382227 a:-0.385718 diff:0.003491 adj:-3
joint[2] t:0.000000 a:-0.005236 diff:0.005236 adj:0
joint[3] t:0.863938 a:0.867429 diff:-0.003491 adj:-12
joint[4] t:-0.479966 a:-0.479966 diff:0.000000 adj:-3
joint[5] t:-0.153589 a:-0.153589 diff:0.000000 adj:2
joint[6] t:0.157080 a:0.157080 diff:0.000000 adj:0
joint[7] t:-0.380482 a:-0.380482 diff:0.000000 adj:-10
joint[8] t:0.000000 a:-0.005236 diff:0.005236 adj:4
joint[9] t:0.860447 a:0.863938 diff:-0.003491 adj:-13
joint[10] t:-0.478220 a:-0.476475 diff:-0.001745 adj:-9
joint[11] t:-0.157080 a:-0.157080 diff:0.000000 adj:-8
偟傖偑傒巔惃
joint[0] t:0.240855 a:0.240855 diff:0.000000 adj:7
joint[1] t:-0.921534 a:-0.928515 diff:0.006981 adj:-6
joint[2] t:0.000000 a:0.000000 diff:0.000000 adj:9
joint[3] t:1.895428 a:1.890192 diff:0.005236 adj:-16
joint[4] t:-0.973894 a:-0.979130 diff:0.005236 adj:7
joint[5] t:-0.240855 a:-0.240855 diff:0.000000 adj:-10
joint[6] t:0.247837 a:0.246091 diff:0.001745 adj:-5
joint[7] t:-0.919789 a:-0.916298 diff:-0.003491 adj:-10
joint[8] t:0.000000 a:0.000000 diff:0.000000 adj:10
joint[9] t:1.893682 a:1.886701 diff:0.006981 adj:-23
joint[10] t:-0.972148 a:-0.970403 diff:-0.001745 adj:-9
joint[11] t:-0.247837 a:-0.246091 diff:-0.001745 adj:-7
娭愡斣崋偼侽偐傜俆偑塃懌偱俇偐傜侾侾偑嵍懌丅丂屢娭愡偐傜懌庱娭愡偵岦偐偭偰侽仺俆偲側偭偰偄傑偡丅
旼娭愡偼joint[3]偲joint[9]丅偙偙偵拝栚偡傞偲丄偟傖偑傒巔惃偺曽偑曗惓妏搙偑戝偒偄偺偑敾傝傑偡丅娭愡偺僈僞晅偒偼妏搙偵傛偭偰憹尭偟傑偣傫偑丄娭愡偵懳偡傞晧壸偼偟傖偑傒巔惃偺曽偑戝偒偄偺偱丄晧壸偺戝偒偝偺堘偄偑曗惓妏搙偵尰傟偨偲峫偊傜傟傑偡丅
曕峴偩偗傪峫偊傞偲丄偙傟傎偳戝偒側巔惃偺曄峏偼側偄偺偱婎杮偲側傞曗惓抣偼曕峴偺婎杮巔惃偺惷巭帪偺曗惓抣偱傕偄偄偺偐側偲巚偄傑偡丅娭愡偺僈僞晅偒偑媡揮偡傞偺偼懡暘巟帩媟偑梀媟偵愗傝懼傢偭偨帪偩偗偩偟丄梀媟偺嵞惗惛搙偼巟帩媟傎偳偼僔價傾偠傖側偄偐傜偲傝偁偊偢偼偄偄偩傠偆丅丂摦嶌偵娭偟偰摦嶌懍搙偲晧壸偑曄傢傞偨傔丄抶傟偑惗偠傞偺偱偙傟傪曗彏偟側偗傟偽側傝傑偣傫丅丂奺娭愡偺栚昗懍搙偲栚昗壛懍搙偲埵抲偼敾傞偺偱丄娭愡偵偐偐傞晧壸偼傢偐傞偼偢丅
栤戣偼娭愡偺梊應晧壸偵懳偟偰娭愡偵憡摉偺僩儖僋傪梌偊傞偲偄偆偙偲偑偱偒傞偺偐偲偄偆偲偙傠偱偡丅丂PID惂屼偝傟偰偄傞僒乕儃儌乕僞乕偼埵抲傪惂屼偡傞傕偺偱丄僩儖僋惂屼傑偱偼偱偒側偄偟丄側偵傛傝僗僥僢僾墳摎埲忋偺墳摎懍搙偼偳偆傗偭偰傕摼傜傟側偄丅
傑偢偼偲偵偐偔偳偺偔傜偄抶傟傞偺偐傂偢傓偺偐傪妋擣偟偰傒傛偆丅
仭俀寧俉擔仭
抶傟丒傂偢傒應掕偵擖傟側偄偱偄傑偡丅
偲偄偆偺傕ZMP偺寁嶼寢壥偵晄埨偑偁傞偐傜偱丄嶐擔傕廔擔偦偺専徹傪傗偭偰傑偟偨丅丂懡幙揰偐傜偺ZMP摫弌偺寁嶼偼偙傟偱崌偭偰傞偺丠偲偄偆偙偲側傫偱偡偑丄偳偆傗傜崌偭偰傞傒偨偄偱偡丅傑偩擺摼偟偐偹偰偄傞偲偙傠傕桳傞偺偱専徹偼懕偒偦偆偱偡丅
寢壥傪埨掕偝偣偨偄偲巚偭偰丄帪娫暘妱傪嵶偐偔偡傞偲傕偭偲抣偑朶傟偩偡丅丂偙傟偼寁嶼傪攞惛搙偵偡傞偙偲偱偁傞掱搙偼梷偊傜傟傑偟偨丅丂帪娫傕寁嶼惛搙傕娷傔偰惛搙傪忋偘傞偲曗惓偼1夞偱傕偄偄偐側乕偲偄偆偔傜偄偵側偭偰偒傑偟偨丅丂寁嶼帪娫揑偵偼偳偭偪偑偄偄偺偐傢偐傝傑偣傫丅
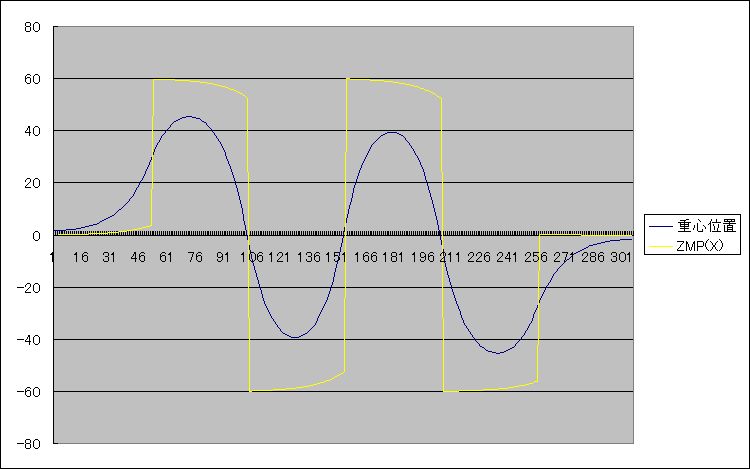
偦偆偟偰傕傑偩ZMP偑媫曄偡傞揰偑偁偭偰偦傟傪挷嵏偟偰偄傑偡丅
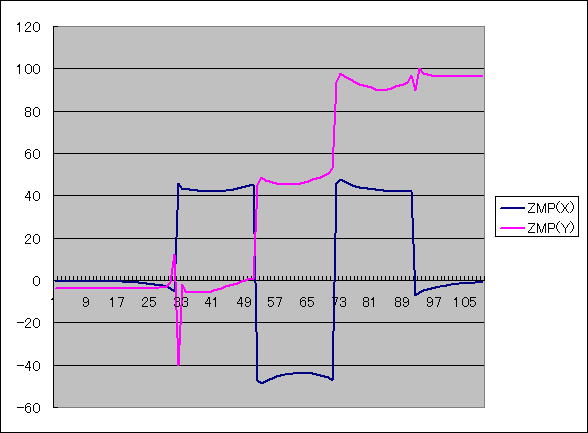
ZMP乮Y)偑ZMP(X)偺媫曄揰偱塭嬁傪庴偗偰偄傞丅偙傟偼側傫偩丠偲偄偆偙偲偱挷傋偰傒傑偡丅
ZMP嶼弌搑拞偺偄偔偮偐偺抣傪尒偰傒傞偲丄媫曄揰偑偁傝傑偡丅偙傟偑ZMP偵尒偊偰偒偰偄傞偺偱偙偺抣偺尨場傪捛偭偰偄偔偲丄
嵍偺旼曈傝偺幙揰偵媫曄晹暘傪敪尒丅
嵗昗偺摦偒偼偙傫側姶偠丅丂1曕栚偼嵍懌偑梀媟偵側傞偺偱梀媟暅婣摦嶌傜偟偄丅丂堄奜偲塭嬁偑戝偒偄丅丂傗偼傝懌偺枛抂廳検傪寉偔偟側偔偪傖側傜側偄偺偩傠偆偐丅丂椉懌巟帩婜娫傪愝偗偨傝丄崱偼儕僯傾偵暅婣偟偰偄傞梀媟塣摦傪壛懍偡傞傛偆偵偡傞側偳偺懳嶔偼峫偊傜傟傞偗偳丄偳偆側傫偩傠偆側偀丅
丂
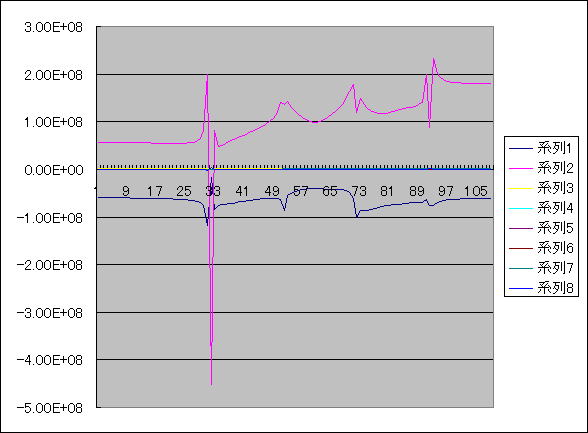
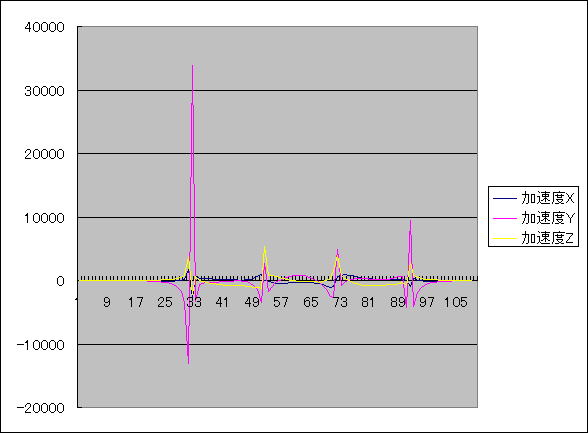
帪乆寁嶼寢壥偑晄掕抣乮NaN乯偵側傞偙偲偑偁偭偰丄偦傟偑嵞尰惈偑側偔偰崲偭偰偄傑偟偨丅丂曄悢偑弶婜壔偝傟偰偄側偄偺偐丄億僀儞僞乕偺栤戣偐丄丂偱傕丄C++偱STL傪巊偭偰偄傞偺偱曄悢偺弶婜壔傕億僀儞僞乕傕栤戣側偄偼偢丅丂朿戝側寁嶼偺儘僌傪庢偭偰挷傋偨偲偙傠丄僞僀儅乕妱傝崬傒傪巭傔傞偲敪惗偟側偄傛偆側婥偑偡傞丅丂彮側偔偲傕柧傜偐偵僞僀儅乕妱傝崬傒傪巊偭偰偄傞帪偼敪惗昿搙偑懡偄丅丂偱傕丄妱傝崬傒偱寁嶼寢壥傪夡偡傛偆側偲偙傠偼柍偄偼偢側傫偩偗偳側丅
僞僀儅乕傪巭傔偰偟偽傜偔條巕傪尒偰丄敪惗偟側偄傛偆側傜峏側傞尨場媶柧偵擖傠偆丅
ZMP寁嶼偺儖乕僾偵僗儕乕僾傪嵎偟崬傫偱傒偨傜丄寁嶼儈僗偼寖尭偟偨丅丂張曽屻偵1搙偩偗僄儔乕僨乕僞偑弌偨丅丂崻杮揑夝寛嶔偠傖側偄偐傜巇曽側偄偐丅
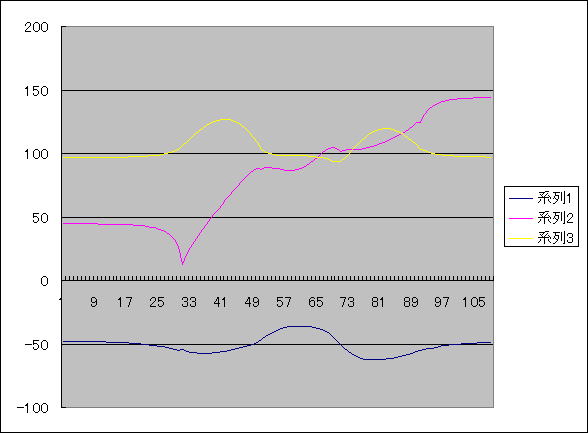
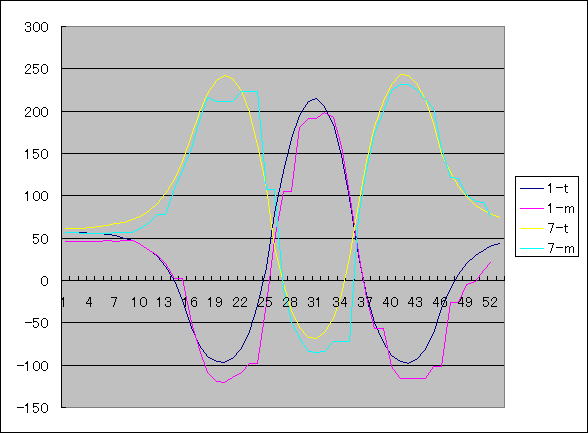
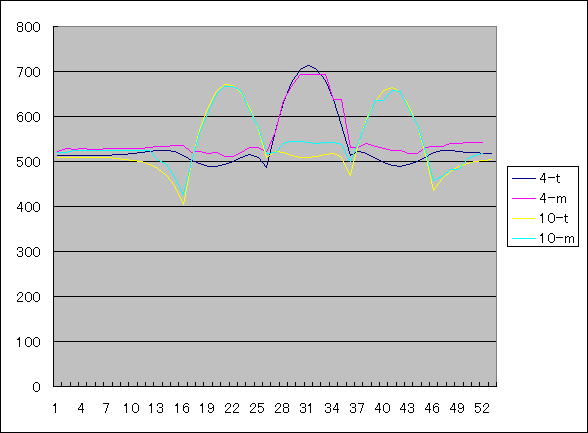
抶傟傗傂偢傒傪尒傞偨傔偵偲傝偁偊偢偼寁嶼偟偨僨乕僞偱曕偐偣傞僾儘僌儔儉傪嶌惢丅丂傗偭傁傝偝偭傁傝曕偗傑偣傫丅墶偵悂偭旘傫偱峴偒傑偡丅丂傑丄梊憐捠傝側偺偱傔偘偢偵抶傟丒傂偢傒偺條巕傪尒傞偨傔偵娭愡妏搙僨乕僞傪嵦庢偟偰傒傑偟偨丅丂僨乕僞拞丄僇僋僇僋偟偰傞偲偙傠偼僨乕僞嵦庢儈僗偱偡丅丂乽倲乿偑栚昗偱乽m乿偑庢摼妏搙丅丂庢摼妏搙偼巜帵偟偰偐傜50ms屻偺僨乕僞偱偡丅堦抳偟偰偄傞傛偆偩偗偳丄幚嵺偼50ms偢傟偰偄傑偡丅
伀傑偢屢娭愡儘乕儖幉丅丂1偑塃懌偱7偑嵍懌丄妏搙偑儅僀僫僗偵側偭偰偄傞帪偑巟帩媟偵側偭偰偄傞偲偒偱偡丅丂巟帩媟偺帪偵僆乕僶乕僔儏乕僩偟偰偟傑偭偰偄傞偺偑傢偐傝傑偡丅丂悂偭旘傇偼偢偩丅
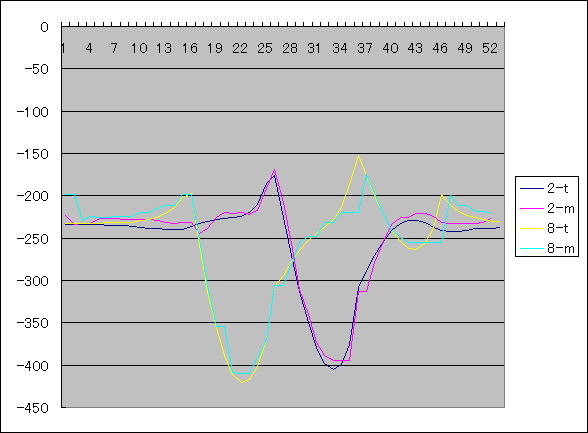
伀師偵屢娭愡僺僢僠幉丅丂傎傏抶傟偼側偄丅丂堄奜偩側丅-200偐傜-250曈傝偑巟帩偟偰偄傞偲偒側偺偱丄妏搙偺僘儗偑尒偊傑偡丅
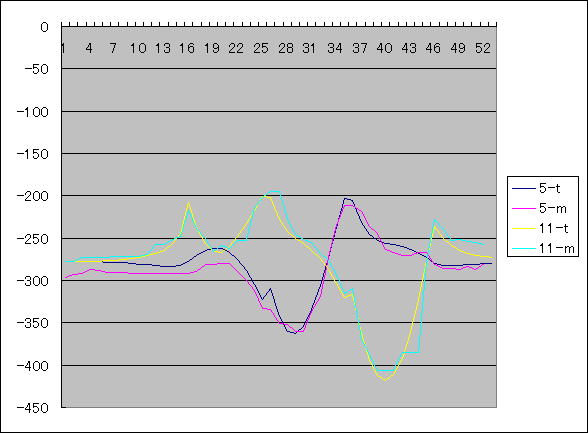
伀偙傟偼戝戁偵偁傞儓乕幉丅丂崱夞偺曕峴僷僞乕儞偱偼忢偵0側偺偵丄巟帩媟偲側偭偰傞帪偵僈僞晅偒偵傛傞僘儗偑偱偰偄傞傛偆偱偡丅丂偡偛偄偢傟偰偄傞傒偨偄偵尒偊傞偗偳2搙枹枮偱偡偹丅
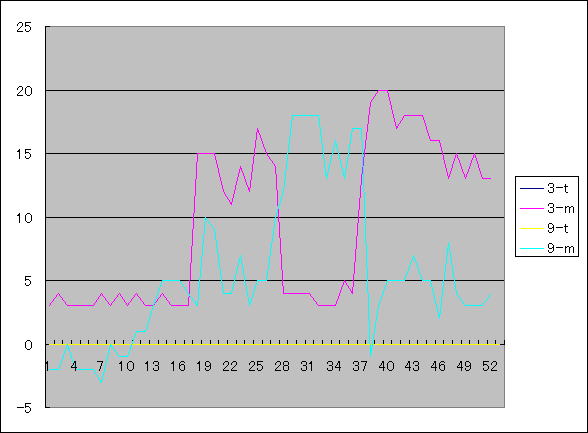
伀偙傟偼旼娭愡丅丂抶傟偼側偄偗偳丄巟帩帪偺妏搙偢傟偑尠挊丅丂巔惃偺僘儗偵偮側偑傞偺偱屻傠偵偙偗傞尨場偵側偭偰傞傛偆偱偡丅
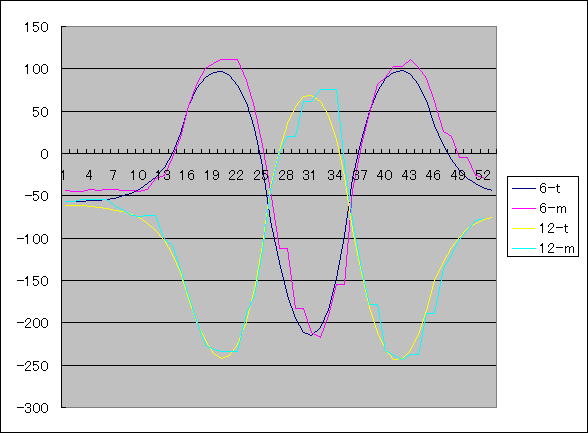
伀懌庱僺僢僠幉丂巟帩帪偵妏搙偢傟偑尠挊丅丂抶傟偼偦傟傎偳側偄傛偆偵尒偊傞丅丂巟帩帪偵僘儗偲抶傟偑崿偞偭偰偄傞偐傕偟傟側偄側偀丅
伀懌庱儘乕儖幉丅丂屢娭愡儘乕儖偲摨偠姶偠偱僆乕僶乕僔儏乕僩偑敪惗偟偰傑偡丅丂偄傑傑偱偼懌庱儘乕儖幉偼僐儞僾儔僀傾儞僗僗儘乕僾愝掕偵偟偰偄傑偟偨偑丄嵞惗惛搙偺専摙側偺偱僐儞僾儔僀傾儞僗偼擖傟偰偄傑偣傫丅丂壸廳偱偙傟偩偗僆乕僶乕僔儏乕僩偡傞傫偩側偀丅丂懌棤偼彴柺偐傜偼偑傟偰偟傑偭偰偄傞偺偱妏搙嵞惗偼偱偒偰偄傞偐傕抦傟側偄偲巚偭偰偄偨偑偦傫側偙偲偼側偐偭偨丅
梀媟暅婣偵抶傟偑傎偲傫偳側偄偺偼堄奜偩偗偳傕偆偗傕偺丅丂僺僢僠幉偑僆乕僶乕僔儏乕僩偟偰偄傞偺偼梊憐捠傝丅曗惓偱偳傟偔傜偄嵞惗惛搙傪忋偘傜傟傞偐丄偩側偀丅
偦偺懠丄梀媟暅婣摦嶌傕側偵偐峫偊側偒傖側傜側偝偦偆偩偟丄傑偩傑偩摴偼墦偄側偀丅