
�J�������C���f�b�N�X��
�O�̃y�[�W��
���V���Q�P����
��ف`���{�b�g���[�ɂ�̊ϐ�ɍs���Ă��܂����B��ɂ���Ċϋq�Ȃ��Ǐo��ҐȎ��ӂłӂ�ӂ炵�Ă݂�Ȃ̃��{�b�g�������Ă��������b�����Ă��������B
�ł��グ�ɂ��Q�������Ă��炢�܂��āA�Ȃ����_�J�݂̂�搶�̐��ʂɂȂ����Ⴂ�܂��āA�A�v�����X�R�l�Y�̃��{�b�g�ʼn����D�������@���Ă���ŏ_���ۂɁu�͂��I�v���Ď���グ�����ǁA��コ�u�Ȃ�ŃG���E�E���J�����o�Ȃ��́H�v�ƕs���ȗl�q�B�@�l������G���E�E���J������ă��{�����ɏo�����ȂƎv���Ă��̂�Y��Ă��B(^_^;)
���̓C�K�@����̌������ŃV�O�}����������Ƃ���ɔE���Ď����čs���Ă܂����B�i�u�V�O�}�������Ă����v���Č���ꂽ��Ȃ��āA�u���ɎQ�����Ȃ��Ă����{�b�g�����čs���ē�������ł���B�v���Ęb�Łj�@�O�閾���ő�ς����Ȗʎ�����c4crono����Ɂu�����Ă���������v���Č���ꂽ�̂ʼn��̕Ћ��ł�������o���ē������Ă܂����B
��������ƈĊO�K�V���K�V���������āu��������v���Č`�e�͔����ł����B�@�������Ă���ƒʂ肪����̊F�������~�߂Ďʐ^�Ƃ��B��ꂽ�肵�āB
����A�݂�ȂQ�����s���{�b�g����Ă邭���ɑ������D���Ȃ�ł��ˁ`�B�@���炭�����k�`�ɉԂ��炢������ċC��������u�T�C�R���V���[�g�v���I����Ă܂���(^_^;)
�㔼�g���悤���Ǝv���Ă����̂����ǁA����������ƈႤ�����ɐi�����������������̂�������Ȃ��B������ʔ�������ɂ�CPU���ł�������i�����\�͂��グ��j�K�v�������āA���ۂɂ̓T�[�{�𑝂₷���Ƃ���CPU�Ȃ̐���n�̎�����Ԃ̕������ɂȂ邩���m��Ȃ��B�w�I�Ȕ��������g��Ȃ̂����B
�@
�����JIN�����Ԗ삳��ƔZ���b���ł��܂����B�@JIN����Ƃ̓��{�b�g�r�W�l�X�̘b�ŖԖ삳��Ƃ͊ߐ���ɂ��āB�@�ǂ���������Ɖc�ƖW�Q�ɂȂ�Ƃ܂�����ŏڂ����͏����Ȃ��ł����A���`�x�[�V����������C���̔]�݂��ɂ͎h���I�ȉ�b�ł����B ���ƁA�̂ނނ���̖\���ɂ��āB����`�����{�y���݂ɂ��Ă܂����`�B���̂ނނ���
�ߐ���̘b�ŁA����̈������L���邽�߂ɂǂ̂悤�ȋZ�p���K�v�����Ęb�Łu��ߋv�̘b�ɂȂ����̂ł����A�������̃N���X�̃��{�b�g�ɂ���ߋ�������Ȃ���Ȃ�Ȃ��ɂȂ��Ă��Ă����ł��ˁB�@���N���N���Ă��܂����B���������Ȃ���ȁ[�B
�@
�ł��グ�Őΐ삳��Ɂu��ف`�v�����闧��ł̊��z���ꂽ��ł����ǁA���̂Ƃ��͈����Ƃ��������Ȃ���Ȃ�Ȃ��Ǝv���Ĉꐶ�����l�������ǂ����ӌ����o�Ă��Ȃ�������ł����A�K���[�T�@�K�̃o�g��(*1)�������̂́u��ف[�v�����ł���B�����Č����Ȃ�A�j���C�_�[����Ƀ}�C�N���������Ă����Ă��������B�@����GIY����̉�����ʔ������Ă�������ł��B�@�i*1���̃��x���̎����Ƃ����Ӗ��ł��j
���ꂼ�݂�Ȃ����������{�b�g�o�g���ȂƎv���܂��B�@���{�������͂��߂Ƃ��鑼�̃o�g�����ł̓��M�����[�V�����̖��Ȃ������Ă��̃J�[�h�Ƃ��̎������e�͐������Ȃ���Ȃ����Ǝv���܂��B�@�T�@�K�̓����i��T-Sto��m�j������炵���������ǁA�T�@�K����������ꂽ�K���[�̉��˂���M���ō��ł����B
���āA�R�A�x�ŏI������������ƃ��`�x�[�V�����オ��������ǂꂩ��i�������悤�I
�@
�����A�d�������Ȃ��čs�����Ǝv���A�܂��͊ȒP�ȂƂ���Ńt�@�[���A�b�v�����T�[�{�̎��͑���B
�����_��RS601CR���g���Ă���̂ł����A����̓R�}���h���T�[�{�Ȃ̂ŁA�p�x�Ǝ��Ԃ�^����ƃ��j�A�ɓ��삷��̂�����ǁA���{�b�g�̑��Ɏg���Ƃ��͂���Ȏg�����͖]��ł��܂���B�@�����_�̏ꍇ��25ms�����Ɋp�x���w�肵�đ������悪�ړI�̋O����`���悤�Ɋe�߂����Ă��܂��B
���͂���25ms�Ƃ������ԂŁA�ł�������ƒZ�����ē��앪��\���グ�������A�ł�������Ƒe������CPU�^�C������肽���BPWM�T�[�{�Ȃ猈�܂��������ɐM����^���Ȃ��ƃg���N���������Ȃ��Ƃ�����肪������̂����A�R�}���h���Ȃ�A�A�A�@�Ǝv������B�@50ms�������炢�Ŏ��ԃf�[�^�����ăR�}���h�𑗂�ƕs�v�c�Ȃ��ƂɃg���N���o�Ȃ��Ƃ�����肪����܂����B�@�d���Ȃ��A�ړ����ԃ[���Ŋp�x�f�[�^���w�����A�����Z�����ԂŎw���������邱�Ƃœ��삳���Ă܂����B�@�܂�APWM�T�[�{�Ɠ��������������Ă����̂ł��B�@�����Ńt�@�[�����ǂ��Ă��炢�A�Z�����Ԏ����Ŏ��ԕt���f�[�^�𑗂��Ă�������Ɠ��삷��悤�ɂ��悤�Ƃ������̂ł��B
���ʂ͗ǍD�B�@����ŃT�[�{�ւ̎w��������50ms�Ƃ�100ms�Ƃ��ɍL���邱�Ƃ��\�ł��B���앪��\��������̂�����ǁA�������CPU���ɂɂȂ�̂͂������Ƃł��B
�@
���ɁA�Ԗ삳��Ƃ���`�����{�̘b�����Ă��āA���u�ŃJ�����摜�ő��c����ƂȂ�ƃJ���������̂Ԃꂪ���ɂȂ�͂������Ă��ƂŁA�{���Ȃ���{�b�g�̐U�����J�����p���Ƀt�B�[�h�o�b�N���邩�A�J�����f�[�^�����U�����s�������ĂƂ���Ȃ̂ł����A�����_�����ڕ��Ƀg���b�L���O���Ă����Ԃŕ����Ǝ�U��L�����Z���Ɠ����̓���������Ȃ����Ǝv���ĎB�e���Ă݂܂����B�@�E�B���h�E�Y�̉�ʂ�L���v�`���[����c�[���ŎB�e���Ă݂܂����B
�@�J���[�摜�ŎB�e�@����̓t���[�����[�g���Ⴗ���Ď�U�ꂪ�B�e�ł��ĂȂ��B
�A���m�N�����������摜�ŎB�e�@���ꂱ��A����Ȋ����B
�B�g���b�L���O�摜�@�{�[�������ɂ���Ă����ƃN�C�b�ƒ����ɖ߂�
���u�ő��c����ɂ͂��ꂭ�炢�̃t�B�[�h�o�b�N�������ᑫ��Ă��Ȃ��ł��ˁ[�B�����ƍ��x�Ȃ��Ƃ����Ȃ��Ƒ��c�҂��������Ⴂ�����B(>_<)
�@
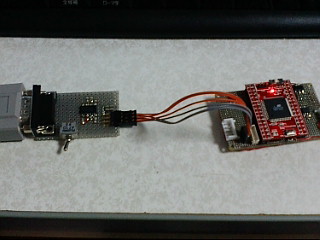
����RPU-10�̃v���O���~���O���\�z�B�@GDL2.0.0.0��SISO���������ăC���X�g�[�����������ł����B�@�e�X�g�v���O������RPU-10�ɓ���ē������Ƃ��m�F�B���`�āA���͉�����������������B�@����σZ���T�[�{�[�h���Ȃ��B�@����ƁAATMEGA128��RS485�|�[�g��2�t���āA�W���C���Ɖ����x�Z���T�[�𓋍ڂ�����Ă��Ƃł��B�@�������͉�ꂽ�Ɛf�f���ꂽ�X�s�[�V�[�Y�̃Z���T�[�{�[�h�̎����m�F�B���ꂪ���������Ă�����_�̕����̓��͋߂��̂����B
���V���Q�T����
���o������߂��Ă��܂����B�@���T�̃E�B�[�N�f�[�͉����ł��Ȃ������B�@�����āA��TRS�R���|�[�l���c�ɒ����������U��͓͂��Ă��Ȃ��B�@���������ȁH�Ǝv���ă��[�����`�F�b�N����ƁA�x�������@���Ԉ���Ă��ă��W�F�N�g����Ă��܂��Ă����B�@�������Ȃ����B�@(�[�[;)
�����́A���̂ł��[�����M����W�����p�[�Ŏ��t���ĉ��t���ō�Ƃ�i�߂Ă݂邩�B�@�����Ă������W���C���������x�Z���T�[�����삳���Ă݂����Ƃ��Ȃ��̂ł��̂����肩��n�߂˂Ȃ�܂��B�@�����G���W�������Ȃ���ˁB
���Ȃ݂ɗ��T�̑O���́A�܂���B�ƎR���֏o���Ȃ̂ŃE�B�[�N�f�[�͊��҂ł��Ȃ��B�@������ƃ��{�b�g�J���ւ̎��g�ݕ����H�v���Ȃ��Ɛi�����ɂ����Ȃ��Ă�B
�@
ROBO-ONE�A���e�i���炠������������Ă�����������{�b�g�������s��������ɃV�O�}���o�ꂵ�Ă�B�@�V�O�}�ł̕s���n���s�������������̂������̑̂��炭����˂��`�B���̓y���͂��ЂƂ���Ɛi�����I
���V���Q�U����
�Z���T�[�{�[�h�̐���B
�����Ɖ�H�}�����č�낤���ȁ[�Ǝv���ăC�[�O�����C���X�g�[�������̂����A�C�}�C�`�g�������킩���B�A�[�g���[�N�v����킯����Ȃ�����C�[�O���ŏ������Ƃ͂Ȃ��̂����B�B�@���ǂ̓m�[�g�ɂ��炳����Ə����Ē���B�@�C�[�O���A�A�A�����g�����Ȃ��`(^_^;)
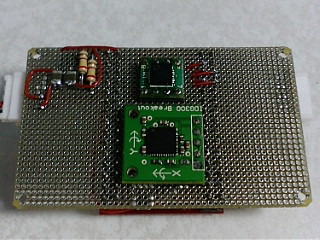
�����ł����̂̓W���C���Ɖ����x�Z���T�[�ƃ}�C�R���{�[�h���n�[�t�s�b�`�̃��j�o�[�T���{�[�h�ɐς�ŁA�d�����������Ƃ���܂ŁB
�Z���T�[�̏o�͂̓}�C�R���{�[�h�̃A�i���O���͂ɒ��Ȃ��B�@���[�p�X�t�B���^�[���炢�͕K�v�����ˁB�@�t�B���^�[�͔g�`�����ĕK�v�ɉ����Č�ɒ������Ă��ƂŁB
 �@�@
�@�@
���Ƃ����RS485��2�|�[�g�t����B
�n�[�t�s�b�`�̃��j�o�[�T���{�[�h�͗\�z�ȏ�ɍ�Ƃ��Â炢�ł��B�@�ڂ�����ڂ���ڂ��Đh������(>_<)
�Z���T�[�̓�����I�V���Ŋm�F�B�@�d���Ȃ������ł����Ɠ�������֗��Ȃ���ł��˂��B
�����̓Z���T�[�f�[�^����荞�ރv���O����������Ă݂�\��B�@����Ƃ���C��RS485�܂Ői�߂��Ⴄ���ȁB
���V���Q�V����
�Z���T�[�{�[�h�̔z�����قڏI���܂����B�قڂ��Ă����͔̂��M��̌����ƁA2����ٖڂ�RS485�̔z�����܂��Ȃ̂ŁB�@�R�������̔z������̂ɂ��炾��ƂP���������Ă��܂����B(>_<)�@���ł�����ō�Ƃ��Ă����̂ō����ɂ��Ȃ��Ă��܂����B�@���������̂ɃG�A�R���Ȃ��ō�Ƃ��Ă������������邩���B�E���Ǐ�ɂȂ肻���������`�B
 �@�R�l�N�^�̈ʒu���ς���Ă܂�
�@�R�l�N�^�̈ʒu���ς���Ă܂�
ATMEGA128�ɂ�UART��2����ٔ�����Ă���̂ł����A����͂���2����قƂ�RS485�Ƃ��܂��B�@�Б���RPU-100�ƒʐM���s�����߁B�����Б��̓T�[�{�ƒʐM���s�����߁BCOM�|�[�g���Ȃ��Ȃ��Ă��܂��Ɠ���m�F���Ȃ��炪���炭�s�ւɂȂ�̂ň�ʂ�̓���m�F�܂ł͂��̏�Ԃōs���B�@RPU-100����RS485�������o������RPU-100�������j�^�[�ł���̂ŁA�����Ȃ����甭�M��̌����ƃT�[�{����RS485�𗧂��グ�܂��B
�Ƃ肠����ATMEGA128��ADC�ŃZ���T�[�̒l��ǂݍ���Ō���Ƃ���܂łł��܂����B
�o�b�t�@���삳����̊y���݂��ȁ[�B���܂��s�������̂����B�@�o�b�t�@���삪�o������RPU-100���̃v���O�����������Ǝ��R�x���オ��B�@�X�ɂ̓^�X�N�X�C�b�`���Ԃ�����قǒZ�����Ȃ��Ă��悭�Ȃ��Ȃ����ȂƎv���B�^�X�N�X�C�b�`���ԁi���ĕ\���ł悩���������H�j�����������i�^�X�N��ւ����N����ɂ��������jCPU�����͂����͂������B
RS485�̓���m�F�܂ł����߂����������A�����̏o���̏�������B�@���ɂ����̍�Ƃ��ł���̂́A�A�A�@�Ηj���̖�B�@�ւ������ؗj���̖�܂ŐG��Ȃ��B(>_<)�@
����A���傤�ǂ悢���M�����[�^�������āA�d������p�̒�R�������̂������Ď��Ԃ��������Ă��܂����B�@���A���ƁA�n�[�t�s�b�`�̃��j�o�[�T���{�[�h�̈����Ɋ���Ȃ��Ď��Ԃ��������Ă��܂����B���ǁA����Ɣz����Ƃ̃J�����߂��ė������ȁ[���ĂƂ���ō�ƏI���B�@���̉����̂��߂ɕ��i���[���Ă����Ȃ�����ȁB�@���ƁA�����납��z����Ƃ̗��K���B�i�E�E�E����͂��Ȃ��ȁB�@(^_^;)�@�j�@��[���i���X�g���Ȃ���B�B�B
���V���R�P����
��͂荡���܂Ń��{�邱�Ƃ͂ł��Ȃ������B�@���傤���c�Ƃ��ċA�����̂ő債�Ď��Ԃ͎��Ȃ��B�@���̏T����ATMEGA�̃v���O���~���O�ɖv���ł���悤�Ƀn�[�h�̓���m�F�����͏I��点�Ă��������B
�ŁARS485�̓���m�F�����Ȃ������B�@RPU-100�ƁA���Ȃ��ʐM�ł��Ă���悤�ł��B�@�����܂ł͗\��ʂ�B
�E�B���h�E�Y��̒ʐM�\�t�g����115200bps�ł����ƒʐM�ł���̂�RPU-100���ƃ{�[���[�g�̌덷�̂����ŕ����������Ă��܂��BATMEGA128�{�[�h�̔��M�킪16MHz�̎��AUART��115200bps�ɐݒ肷���2%�قǂ̌덷���o��̂����A���̌덷�����e���Ă���Ȃ��̂��B�@�t��RPU-100��117647bps�Ȃ�Đݒ肪�ł���̂ŁA�n�[�h�̊m�F���Ȃ�Ƃ��ł�����ăX���|�[�ł��B�@�T�[�{�͂���Ȑݒ�ł��Ȃ��̂�ATMEGA128�{�[�h�̔��M����悹�ς���܂ł͐ڑ��m�F�ł��܂���B
���A���Ȃ݂ɒ������Ă������M��Ƃǂ��܂����B
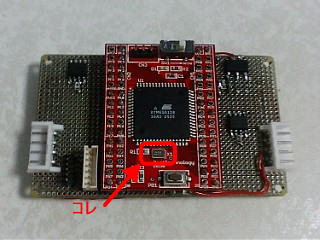
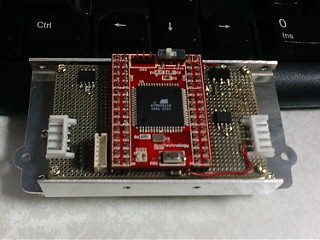
 �@CPU�̏�ɏ���Ă�̂�����B
�@CPU�̏�ɏ���Ă�̂�����B
�����Ə�邩�Ȃ��`�B�@����A�悹��������I
�����̓v���W�F�N�g�̑ł��グ������̂ō�ƕs�B�@�ӂ��B
���W���Q����
���N�̓}���V�����̗��������Ȃ���Ȃ�Ȃ���ɁA��K�͏C�U�̔N�B�@�ߑO���͑�K�͏C�U�̐�����ɏo�ȁB�@�o���R�j�[���g���Ȃ��Ƃ��A�G�A�R���̎��O�@���ړ������Ȃ���Ȃ�Ȃ��Ƃ��A�����J�����Ȃ��Ȃ�Ƃ��A��ς��B�@��Ɖ����������炵���̂ŁA�����ɕ֏悵�ĕ��i���H����Ƃ�(^_^;)�B�B�@
�@
�n�[�h�͂Ƃ肠���������Ǝv���Ă������A�厖�Ȃ��Ƃ�Y��Ă����B�����_�ɃR���g���[�����Ȃ����߂�RRC-R11�̐ڑ��R�l�N�^�����Ȃ���Ȃ�Ȃ��B�@����͔��M��������������Ƃ�SPI���C�^�[ISP���C�^�[�Ƌ��p�Ŏg����悤�ɂ��悤�B�@���iISP�R�l�N�^�ɂ�~RESET�����e���Ȃ���Ȃ�Ȃ��̂ŋ��p�͂ł��Ȃ������ł��B�j
RRC-R11�̃R�l�N�^�͕�������Ȃ����[�J�[�́A���肪����ȕ��i���g���Ă���̂ŏH�t���œ���\��ZHR�R�l�N�^�ő�ցB�����Ƃ͂܂�Ȃ����ǁA�܂�������B�@�R�l�N�^�̃s�b�`��1.5mm�Ȃ̂�1.27mm�̃��j�o�[�T����ɂ͑����Ȃ��č������肵�Č��\�ȃo���b�N����ɂȂ��Ă܂��B

���ŁA����ȕ��ɂ��܂����B
���āA����̓���m�F�Ȃ��ǁASPI�ڑ��炵���̂����A�ǂ��炪�}�X�^�[�Ȃ̂��A�`�������͂Ȃ�Ȃ̂��HLSB�Ȃ̂�MSB�Ȃ̂����킩��Ȃ��B�F�X�ƒ��ׂĂ݂������炸�A���ǂ͐F���Ӱ�ނ������Ē��ׂčs���܂����B
���s����̌��ʂ킩�����̂́A�@�}�C�R�������}�X�^�[�@�AMSB��s�@�B�����ʂ�3�@�C�N���b�N���g����1MHz���炢�@�D�u~SS�v��L�ɂ��Ă���200��s���x�̃E�F�C�g���K�v
���Ċ����ł��B�@1�p�P�b�g��8�o�C�g�ł��B�@�f�[�^�̃t�H�[�}�b�g��SISO����̃u���O���Q�l�ɂȂ�܂��B
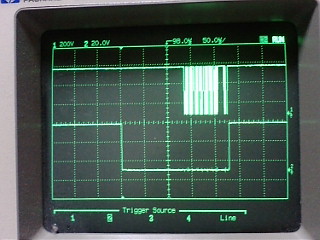 �@SS��SCK�̗l�q�B�@SS��8�o�C�g�̃p�P�b�g�ň�xH�ɂ��Ă܂��B�@�K�{���ǂ�������Ȃ����ǁB
�@SS��SCK�̗l�q�B�@SS��8�o�C�g�̃p�P�b�g�ň�xH�ɂ��Ă܂��B�@�K�{���ǂ�������Ȃ����ǁB
�N���b�N�͂����Ƒ������Ă������̂�������Ȃ����ǎ����Ă܂���B�@200��s���x�̃E�F�C�g���ǂꂭ�炢�Z�����Ă����v�����Ă̂����邯�ǂ�����ɂ߂Ă܂���B�@���Ȃ݂�RPU-10�̃��C�u�����[����500��s���炢�̒���������܂��B�@��̉摜����150��s���炢�ł��ˁ[�A���ꂭ�炢�ł����v�Ȃ炵���B
���W���R����
���������Z���T�[�{�[�h�̐���B
�����Ƃ����M����悹�ς���RS485���L�`���ƂȂ��ŁARPU-100�Ƃ̒ʐM�ƃT�[�{�Ƃ̒ʐM���m���������Ƃ���Ȃ̂����AISP�R�l�N�^�Ƃ�����1.27mm�s�b�`��1��w�b�_�[���茳�ɂȂ��̂Ői�߂��Ȃ��B�@�����Ă�Ƃ����T���Ĕ������Ƃ��܂����B�@���T���ɂ��邩�Ȃ��`�B
�܂��߂ɍl����ƁA�Z���T�[��AD�ϊ��ƁA�T�[�{�ւ̒���R�}���h���M�ƁA�R���g���[������̒����M�ƁARPU-100����̕s����f�[�^��M�ƃZ���T�[�f�[�^�v���ƁA���̕Ԏ��B�@�����R��Ȃ��x��Ȃ����Ăł���̂��ǂ����B�@�����̌ߌ�̑O���́A������ǂ�����Ď���������̂����l���Ă���܂����B
�^�C�~���O���l���Ďd�����d�Ȃ�Ȃ��悤�ɂ���ׂ����Ƃ��v�����̂����ARPU-100����݂͔��ɂȂ炴��Ȃ��B�܂��A�\�t�g�̍��Ƃ��Ă͂قƂ�ǂ��n�[�h�̏����҂��̂����A�قƂ�ǂ̑҂������荞�݂Ŏ邱�Ƃ��o����̂łȂ�Ƃ��Ȃ��Ȃ����Ǝv���Ă܂��B�@�܁A����Ă݂悤�B
�����̓Z���T�[�̃f�[�^�擾�������쐬�B�@5�`�����l������2ms�����Ŏ擾�A�����ƒZ�����ł������Ȃ̂����A����ȏ�f�[�^�������ƁARPU-100���ւ̓]������ςɂȂ�̂ł��ꂭ�炢�ł����ł��傤�B�@���܂�Ƃ���AD�ϊ��͊�d�����}�C�R���{�[�h�̓d���d���ł���5V�ōs���Ă���̂Ő��x�������B�@���߂ăZ���T�[�̓d����3.3V�ɂȂ��Ȃ��Ƃ��������Ȃ��B�@�m�C�Y�͑��v���Ȃ��`�BLPF���ꂽ���������낤���ǂȂ��B
�@
���T�̓y�j���͊֓��g���{�b�g���K��B�@�H�t���ɔ����������邵���Ѝs���������ǁA�������{�b�g���Ȃ���ȁB�@�܁A�������{�b�g�������ĂȂ����炠�܂�W�Ȃ���(^^�U
���߂āA�����_�̃T�[�{�P�[�u���̒��蒼�����炢����Ă������Ȃ��B�@���Ԃ�����B
���W���W����
���������Z���T�[�{�[�h�̐���B
�Ηj���ɂ�1.27mm�s�b�`�̃w�b�_�[���͂����̂�ISP���C�^�[�Ƃ̐ڑ��������Ă݂��B�@�Ƃ��낪�A�Ȃ���Ȃ��B�B�B�B�ǂ����Ă��Ȃ���Ȃ��B�@����SPI�C���^�[�t�F�[�X���Ȃ������iSS�͎g��Ȃ��̂����ǁj�@������A�ǂ��Ƃ������Ƃ͂Ȃ��͂��Ȃ̂ɂ���Ƃ�����Ƃ�����Ȃ��B�@���C�^�[����ꂽ�̂��Ǝv�������AATMEGA32���Ƃ����ƂȂ���̂��B�@�d������A���Ď��Ԃ̂�����ɁA����ς��čăg���C���Ă݂����A�_���B�@1.27mm�w�b�_�[�����������H�Ƃ����s�s�ȋ^���������Ă݂��肵���̂����A�ڑ��͑��v�B
���̂܂܂��ƁA���������Ȃ��̂œy�j���͗��K��ɍs�����ɓO��I�ɂ�邵���Ȃ����ȁ[�Ǝv���Ă����B�@�̂����A
�����A���o���̐܂��PC��ATMEGA128�̃f�[�^�V�[�g�����ĐV�����̒��Ń`�F�b�N�B�B�@����ƁAATMEGA128�̃V���A���v���O���~���O�̍ۂ�SPI�ڑ��Ɏg�p����|�[�g��SPI�C���^�[�t�F�[�X�p�̃|�[�g�ł͂Ȃ���RX0��TX0���A�T�C������Ă���炵���B�@�K�[�[�[���[�[�[�BATMEGA�Ɠ�����SPI�|�[�g���g���ƌ��ߕt���Ă��B�@�ł��A�ԈႢ���������Ă悩�����[�B
�A���Đڑ����C�����Ė���ISP���C�^�[���Ȃ����ăv���O�����̏������݂�����ɂł��܂����B�@�v�����݂ō�Ƃ����ɂ����ƃf�[�^�V�[�g�ǂ܂Ȃ���_���ł��ˁB
����ł���Ɣ��M��̎�ւ����ł���悤�ɂȂ�܂����B�@
���W���P�O����
����͊֓��g���{�b�g���K��ɍs���Ă��܂����B
�����_���V�O�}������̏�Ԃ��������A��ꂪ���{�b�g�����X����������Ȃ̂ŁA�����_���V�O�}�������Ă������APC�ƃZ���T�[�{�[�h���������čs���܂����B�@�܁A�Ă̒���͎G�R�Ƃ��Ă���PC���L����X�y�[�X���v���O�������镵�͋C�ł��Ȃ������̂�PC�������o�����ɏI���܂����B
�ł��グ�ɍs�������AK����Ɂu����ۂi�V�O�}�̂��Ɓj�͂ǂ��Ȃ�܂����H�v���ĕ����ꂽ�̂����������ɁA���`���������A���Ă��Ƃŏ������ăp���[�̂���CPU�{�[�h�ɂ��Ēk�`�B�i�V�O�}�ɂ͏��^�ō����\��CPU�ς�ŁAIK�Ń��[�V�����N�����ĕ����������ȂƎv���Ă����̂Łj�@SENB1200A���悳���������ǁA10���~���邯�ǁE�E�@���Ęb�ɁB�@���ׂĂ݂��RT�ň����Ă邵�A5���~���Ă邵�A50�~70mm�����AIO�������邵�A5W�ゾ���A1200MIPS�����A������ď��]�ɍœK����Ȃ��ł����B�@�����������K������������������Ă���ꂽ�̂ɘb����悩�����̂ɁA�c�O�B�@���Ȃ݂�RPU-100��CPU���ؽ���MPC5200�ōō����x��760MIPS�AC7@1G��MIPS�l�́A�A���ׂĂ��킩��������ǁA1200MIPS���Ă����[���B
���������������Z���T�[�{�[�h�B�@ISP���C�^�[���Ȃ������̂ōŌ�̂͂t���A���M��̎�ւ������܂����B����������ɒ[�q�������ɂ���^�C�v�Ȃ̂ł�����Ƌ�J���܂������A�`�b�v���i�̕t���ւ��͐����B�@RPU-100�Ƃ̋K��{�[���[�g�ł̒ʐM�����܂������܂����B
�ł��A�F�X�Ɩ��������Ă����ɂ��܂��s�����킯���Ⴀ��܂���ł����B�@�܂��AUART0��MAX485�Ɛڑ����Ă��܂���ISP���C�^�[�Ƃ̐ڑ������܂������Ȃ��B�����RX0�����p�ƂȂ�̂�MAX485����̏o�͂ƃR���t���N�g���Ă��܂�����ł����B�v���_�E�����Ă�������M��ւ��[�q���v���A�b�v�ɂ��邱�ƂőΏ����܂����B
�v���O�������ł���肪�B�@RS485�̃e�X�g������v���O�������蔲���ō���Ă��āA���M���ɂ����ςȂ��ɂ��Ă�������ARPU-100�̋��������������B�@�n���O���Ă��܂��܂��B�@�ǂ����RS485�|�[�g����L����Ă���Ƃ��܂��Ȃ��炵���B�Ƃ������ƂŁARPU-100�̃f�o�C�X�����ݒ肪��������܂ł͎��Ӄf�o�C�X�i���̏ꍇ�Z���T�[�{�[�h���j�����M���[�h�ɂȂ��Ă͂����Ȃ��悤�ł��B�@���̂������RPU-100�̖��Ȃ̂��낤���A�d���Ȃ��Ȃ��B
���Ƃ͂Ђ�����v���O�����B�܂��̓X�g�b�N�����Z���T�[�f�[�^���܂Ƃ߂ĕԂ��v���O����������Ă݂܂��BCOM�|�[�g�����ׂ�RS485�ɂ��Ă��܂����̂Ń��j�^�[����ɂ�RPU-100���o�R���˂Ȃ�Ȃ��B�@�ꉞ�AUSB-RS485������ޗ�������ł͂���̂����APC�����瑗�M���邽�߂̐��䂪�킩���̂ŕ��u�B
�@
���܂܂ł̓T�[�{�̓d����RS485�����ʂ���RPU-100���������Ă܂����B�@����̃Z���T�[�{�[�h���T�[�{�f�[�^�o�b�t�@���Ȃ��ƁA1�{�ׂ̍����őS�T�[�{�̓d�����������邱�ƂɂȂ�A�댯�ł��B�Ȃ̂œd�������͕ʃ��[�g�Ńo�b�e���[���璼�ڋ����ł���悤�ɍ\����ύX���Ȃ���Ȃ�܂���B�@���̔z�d�{�[�h�����Ȃ��ƃT�[�{�̃R���g���[���͂ł��Ȃ��̂ł��B�@���A�A����ƁA�z�d�{�[�h��v����܂ł̓T�[�{�P�[�u���̒��������܂�Ȃ�����T�[�{�P�[�u���̍�蒼�����ł��Ȃ��Ȃ��B�B�����ނ��`�B�B�@�z�d�{�[�h�ǂ��ɐς������B�B�B
���W���P�P����
����ς�T�[�{�̔z���Ɠd��������L�`���ƌ��߂Ă������Ǝv���āA�R�l�N�^�{�[�h�̌���������B
RPU-100�̃R�l�N�^���̋߂��ɃX�y�[�X���������̂ł����ɃR�l�N�^�{�[�h�����t���邱�ƂɁB�@�����Ȃ�RPU-100�����ł��o�b�t�@�{�[�h�i���Z���T�[�{�[�h�j�o�R�̐ڑ��ł��P�[�u���������ς�炸�ɍςށB�@����Ńo�b�t�@�{�[�h�����ɂ��Ă��P�[�u���̍�蒼����i�߂邱�Ƃ��o���鎖�ɂȂ����B
�������茊���J������͋x���̍�ƂɂȂ�̂����ǁA�P�[�u���쐬�͖�ł��o����Ȃ��`�B
�@
�������炭�A���{�b�g�̑��\���̕ϑJ�ƁA�X�ɐ���̂�ف[�Łi�ɋǕ��I�Ɂj�b��ɏオ������ߋɂ��čl���Ă���B
�����O���烊���N�\�����͂��悤�ɂȂ������A�����N�\���Ƃ����̂́A���镔���œ�ߋƓ������������B�@�܂�A���̎p���Ɋւ�炸�����������Ȃ瓷�̂͐����ɂȂ�Ƃ������ƂŁA���̎��R�x�̗}���̋@�\���ʂ����Ă���B�@�����A�}�������������Ă��āA���{�b�g�S�̂̎���p���ɂ��������ł��Ă��܂��A�N���オ��p�����A�N���o�b�e�B�u�ɂȂ��Ă��܂����肷��Ƃ������_������B�@���ߍ\���ł̕s���肳��}��������@�Ƃ��Ă͖��͓I�Ȃ̂����A�������{�b�g��ڎw�������_�͓���悪�}�������̂͊������Ȃ��B
�������L�[�v���Ȃ�����s���肳��}������\���͂ł��Ȃ����̂��Ǝv�Ă��Ă���B�@�������A�C�f�B�A�͂���̂����A�G�ɕ`�����݂��ۂ��B�@�ǂ���ɂ��Ă������_�ɐ܂荞�ނɂ͉����Ƃ�������蒼���ɋ߂��B
�E�E�E��蓹�����肾�Ȃ��A�ŋ߁B�B(^_^;)
���W���P�Q����
�����͎R���o���B�@�����Ȃ�R���o���̋A��͓��}�J�C�W�������̂悤�ɂȂ��āA�������Ԃ��琌�������Ă��܂��Ă���Ƃ���Ȃ̂����A�����͂��̃����o�[�����Ȃ��Ă��������Ĉ�l����ł���B�@����႟���܂��ɋA�����烍�{��邼�A�@�Ǝv���Ă����̂����A�ЂƂ肶�႟����܂���ł����B���܁A���N���Ђ̐V�l�N���d������������Ė��ڂŃv���W�F�N�g�̃����o�[�Ɍ}������Ă���̂ł����A�ނ��ʌ��ŎR������̏o���̋A��ł��B�@�V�l�N�Ɠ�l�ŋA��̂ɂ���ӂ���ȂȂ��Ă��ƂŌy���r�[���ł����݂Ȃ���A���Ă��܂����B�@�y����������ł��Ȃ��̂ɁA�A���̐����s�����������Ă��A�Ȃ����������Ă��܂��āA�����Ɖ��ɂȂ��Ă��܂����̂��^�̂��A�@�C�����Ɠ��t���ς���Ă��܂����B�@���Ă̂͑傰���ŁA�Ȃł����W���p���̎�����������A�_���̒J�{�I��̊�т̃R�����g������͂��Ă���ł����ǂˁB
�Ƃ������Ƃő����A������R�l�N�^�{�[�h�̐�������悤�Ƃ��A�P�[�u���̐���ɒ��肵�悤���Čv��͖A�Ə����܂����B�@�������A��ɂ���ĎR���s���̓��}�̒��ł̓��{�b�g�������Ă܂����B�@�����̂���̓Z���T�[�{�[�h�Ƃ̒ʐM�t�H�[�}�b�g�B
�Z���T�[�{�[�h����T�[�{�ւ̃f�[�^�̓}���`�T�[�{�R�}���h�i�t�^�o�I�ɂ̓����O�p�P�b�g�ƌĂԁj��20�̃T�[�{�֒���I�ɑ��M����B�p�P�b�g�f�[�^������I��������_�őΏۂƂȂ�T�[�{����Ăɓ�����J�n����̂ŁA�T�[�{�̓����������ɂ̓p�P�b�g�̒�������ɓ����ɂ���K�v������B
�f�[�^�Ƃ��ĕω�����\���̂��郌�W�X�^��10���炢�Ȃ̂����A���W�X�^���A�����Ă���K�v�Ȃǂ����邽�߁A1�T�[�{������14�o�C�g�̃f�[�^���������ő��邱�Ƃɂ��Ă݂��B�@�T�[�{��20����280�o�C�g�A�w�b�_�[������290�o�C�g�قǂȂ̂ŁA460800bps�ő����6.5ms���炢�ő���I���B�@����̃T�[�{�t�@�[���̉��ǂŁA����قǃR�}��Ȏ��n��f�[�^�����Ȃ��Ă��������蓮���悤�ɂȂ����̂ŁA�������Ȃ��`�A20ms�������炢�ł������ȁB����Ȃ�c�莞�ԂŃT�[�{�̊p�x�╉���̋z���グ���o����B1�t���[��������2�T�[�{����f�[�^������������낤�B
RPU-100����̃f�[�^��100ms�Ɉ�x�A5�t���[�����̃f�[�^�𑗂�����A������͓��������K�v���Ȃ��̂Łi���̂��߂̃o�b�t�@�����j�ω�����f�[�^�����𑗂�����B
�����_�͍��̂Ƃ��둫��6�~2�A�r��4�~2�A����3�A�J�j���2�ō��v25�̃T�[�{������B�i�܂Ԃ��̊J�͏����j�@��L��20�Ƃ���̂͗��r�����̃T�[�{�ŁA��������삳���悤�Ƃ��Ă���B���Ɨ����RPU-100���璼�ڃR���g���[�������悤���Ȃƍl���Ă���B�@����͂ǂ��ł��������Ǔ��̃T�[�{�̓g���b�L���O�����������W����100ms�����ł��܂��������ǂ����͎������Ă݂Ȃ��Ƃ킩��Ȃ����B
���Ƃ́A�Z���T�[�{�[�h�ō̎悵���T�[�{�̊p�x����W���C���Ɖ����x�Z���T�[�̃f�[�^���X�g�b�N����̂����ARPU-100����̗v���R�}���h�Ńf�[�^�𑗂�o���˂Ȃ�Ȃ��B�@���̑���o���f�[�^�t�H�[�}�b�g������Ă݂��B�@�f�[�^�����̗L�����킩��悤�ɃZ���T�[�{�[�h�Ōv������t���[���i���o�[��t�^����Ƃ��A�v���R�}���h������ł͂Ȃ��̂ő���o���f�[�^�����s��ł���A���̂��߃p�P�b�g�����p�P�b�g�w�b�_�[�Ɋ܂߂Ȃ���Ȃ�Ȃ��Ƃ��A���������̂����߂Ă܂����B
�@
���ǂ���ς�T�[�{�̊p�x�f�[�^���Ă̂�200ms������20�����̎�ł�����Č`�ɂȂ肻���B�@����͑����������ė~�������ŁA���߂�20ms������20���炢�̃f�[�^�͍̎悵�����B�@��������ɂ��ăR���g���[�����ł������Ă̂��������ǁA�}���`�h���b�v����Ńf�[�^�t�F�b�`�R�}���h�𑗂�����ڑ�����Ă���T�[�{���g�[�N�������O��g��ŏ��Ƀf�[�^�𑗂��Ă�����Ċ����ɂł��Ȃ����Ȃ��B�@�i���T�[�{�t�@�[���������������ǂ�(>_<)�@�j
�������܂ŏ����āA�ӂƎv���o�����I�@�����O�p�P�b�g�̍Œ��f�[�^����128byte�ł����B280byte����2��ɕ����Ă�����Ȃ��@(>_<)�@�v�Č����B
���W���P�T����
����A�����ƕ����ˑ��Əo���ł����B�@���t���ς�������ɋA��ł��B
�H�c��`�łӂ��Ɨ���������{���Łu�l�ƃ��{�b�g�̔閧�v�i�x�c���i���j�Ƃ����{�������܂����B�@�ς�ς�ƌ��āA���`�x�[�V�����A�b�v�ɂȂ邩�ȂƎv���Ĕ����Ĕ�s�@�̒��œǂ�ł܂����B
���������{���ĂȂ�Ă����W���������ČĂ��̂��m��܂��ǁANHK�X�y�V�����݂����Ȋ���������h�L�������^���[���Č����̂��ȁH
���̖{�̒��őO�엲�i�����i�c��`�m��w�j�̎ӎ������Ƃ������̂��Љ��Ă��܂����B�@���ꂪ�����_�Ɏ������������ǂ����ς蒅��ł��Ȃ��ł���u�ӎ��G���W���v�̍\�z�Ɏ��Ă��܂��B�@�O�싳���͊��Ƀ��{�J�b�v�̃��{�b�g�v���O�����ɂ��̍l���f�����Ď��؎���������Ă���悤�Ȃ̂Łu�ӎ��G���W���v�̍l�����͂���قǓ˔�Ȃ������Ȃ��Ɗ��ł����̂��������肷�ׂ��Ȃ̂��B
�܂�A���̒i�K�ł����{�b�g���u�ӎ��v�������Ƃ͏\���\���Ƃ������ƁA�@���̓N�I���A�̕��ł��B�@�{�ɂ�������Ă������ǑS�Ă̎��ۂ��G�s�\�[�h�Ƃ��ċL�����邱�Ƃ͕s�\�ŁA�N�I���A�ɂ��I�ʂ��K�v�ƂȂ�킯�ł����A�N�I���A�̐��̂ɂ��Ă͐G����Ă��܂���ł����B�@�����v���ɁA�N�I���A���ăf�W���u�[�ɋ߂����̂Ȃ�Ȃ����Ȃ��Ǝv���Ă܂��B�ߋ��̋L���̒~�ς�����₠���Ԃ���ʎ�������̂ł͂Ȃ����ƁB�B�@�����Ƃ����Ɛ��܂ꂽ�Ă̎q���ɂ̓N�I���A���Ȃ��B����͖̂{�\�ɂ��N�I���A�ł���͂����Ō����N�I���A�Ƃ͕����čl����ׂ����̂ł́B�B�B�@�Ƃ����������Ƃ��l���o���Ƃǂ��Ղ��ꂽ�邪�����Ă��܂��܂��B
�@
�ƂɋA��ƒ������Ă����u�c���͂��Ă��܂����BSEMB1200A�ł��B�@�����ŃV�O�}�����Ă݂悤�Ǝv���Ă܂��B�V�O�}�����������Ƃ�����Ɩܑ̖����悤�ł����A�V�O�}�͓��ʃ����R�����{�Ȃ̂����ǁA�����IK�ŎZ�o�������ł��B�@�����Ĉ��H���j�ɂ̓Z���T�[�t�B�[�h�o�b�N���K�v�ŁA�}�C�R�����x�����Ɣ\�͓I�ɂ͕s��������܂��B�@�����Ē��r���[�Ȕ\�͂�CPU�ŋ�J���邭�炢�Ȃ珈���\�͂����Ղ��CPU�ŁA�W���u�W���u�ƌv�Z��������Ă����ł͋�J�������Ȃ��̂ł��B�\�͂������ȃ}�C�R���{�[�h�ł����\�Ȓl�i�����邵�A����ɔ�ׂ�Ƃ����͍����\�Ȋ���ɂ͈����ȂƎv�����̂Ŏv�킸�����Ă��܂��܂����B�@�����I�ɂ̓����_�̏��]�ɂ����ꂩ���̌�p�ƂȂ�悤��CPU���g�������ł��ˁB

RAM�����Ȃ��̂ŁA��]�I�A�v���ɂ͌����Ă��Ȃ����AIK���g���͈͂ł͂����̂����ǁA�����I�ɂ͊ߐ�����m���f�[�^�x�[�X�iHMM�̂悤�ȁiHMM���u�m���f�[�^�x�[�X�v�ȂǂƌĂ�ł����̂��ǂ����͒m��܂��j�@�j�@���g����ׂ����ƍl���Ă���̂ŁA�����Ȃ�Ƃ����������̂ő�e��RAM�ƃX�g���[�W���K�v�ɂȂ��Ă��܂��܂��B�@���A���̒i�K�ł͏��]�Ƃ��Ă͍ŋ��Ȃ�Ȃ����낤���B
���ӏ����ɔM��R��8��/W�ȉ��ƂȂ���M���K�v�ƂȂ��Ă���B����͌��\�������肵�����M���v����Ă��Ƃł��B�ǂ����œ��肵�Ȃ���Γd��������Ȃ��Ȃ��B�@���M�͂���炵���̂���Ђ̎������ɂ��邩���B�@�R�l�N�^�͔���Ȃ���Ȃ�Ȃ����A�T�[�{�ɂȂ����߂ɂ͊O����H��������ƕK�v�B�@��������g��UART��RS485�ɂ��āA�V�O�}�̑�������قŐ��䂷��\��B��{��UART��������6�`�����l�������ǁA�������͕ʂɎg���Ƃ���Ɗg��UART��4����فB�@6�{����4����قŖʓ|�݂���ăL�����������ǂȂ�(^_^;)�@�c�O�Ȃ̂�ADC���Ȃ����ƁB�g���{�[�h������Ώo���邯�ǁACSI�|�[�g�̓R���g���[�����Ȃ������̂ł��߂��B�@�}�C�R����UART�łȂ��Ŏ擾������Ċ������Ȃ��B�@����ɂ��Ă����������ł��B�����������ǂ�������Əd���B
�����W�̂��߁A���c�����HP�߂Ă�ƁA1�N���O��RT�ł����̍u�K��Ƃ�����Ă��ł��ˁB�@���̍��̓m�[�`�F�b�N�������ȁB�@�܂�����Ă���Ȃ����낤���B(^^�U
�@
���āA����������ATMEGA128�{�[�h�̃v���O�����B�@������͂���`�����{�̗\�I�ϗ��ł��B�@����`�����{���ǂ�Ȃӂ��ɂȂ�̂��y���݂��ȁB
���W���P�U����
�����͈ꐶ�����R�[�f�B���O�̓��ł��B
RS485����������Ă��̂����ǁA�t���̃��C�u�����ł͂�����ƕs�\���Ȃ��Ƃ�������UART�����S�����������B�i���Č����Ă��債�����ƂȂ��ł����j�@�����2��UART����ɓ����ɓ���������B�@�����ɓ������Ă݂�ƁA�����ɓ������ƕЕ��������Ɠ����Ȃ��A�f�[�^�������Ă��܂��B�@�������ȁ[�B�@������M�A�������M�A��M�E���M�A���M�E��M�������Ɣ��œ����Ȃ��ƃo�b�t�@�ɂȂ�Ȃ����ǁB
�������Ȃ��`�Ǝv�������_�ŗ[���������̂����ǁA�R�l�N�^�{�[�h�̍H��𖾂邢�����ɂ��Ȃ�����Ȃ�Ȃ��̂���������Y��Ă����B�@�C�������ւ��ē�������O�ɍH����I��点�悤�B
 �@
�@
�����_�̃t���[�����i�ɃZ���T�[�{�[�h�ƃR�l�N�^�{�[�h�̎��t�������J����B�������������_���������Ȃ��`�B�B�B�@���Ԃ�����������Ă邯�ǁB�@�Z���T�[�{�[�h���������Ă��{�̑��̃v���O�������A������g�����v���O�����ɏC�����Ȃ���Ȃ�Ȃ��B�����͂܂����炭�悩�B�B�B�@����ς荡�܂ł̃Z���T�[�{�[�h�Ƃ̌݊��v���O��������낤���Ȃ��`�B�@����Ȃ炷���ł���͂������B
���W���P�V����
����`���v���W�F�N�g�̗\�I���ςɍs���Ă��܂����B
���̋��Z���ǂ�Ȃӂ��ɂȂ�̂����Ă̂��C�ɂȂ����̂����ǁA�Ȃ�ƌ����Ă��̂ނނ���̃A�}�e���X�̐V�^�Ƃ��A�Ԗ삳��̃g�R�g�R�ۂ̐V�^���������čs���܂����B
�A�}�e���X�͎c�O�Ȃ����������Ă܂����B�@�F�X�Ƃ��b�����Ă��炢�܂������ǁA���ꂭ�炢�i�V�^�A�}�e���X�̐v�T�C�Y�j�̃T�C�Y�ɂȂ�ƁA�����ڂ͓����Ȃ��Ƃ����Ƃ܂�����ł��傤�ˁ`�B�@�f�r���[���y���݂ɂ��Ă��܂��B�@���A����100K���T�[�{�̋�Ȃ��m�肽���ł��B
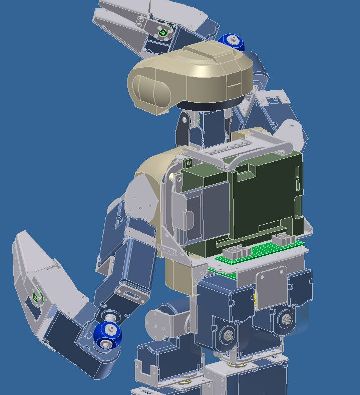
�g�R�g�R�ۂ͂������}�j�s�����[�^�ŁA�V�^�̑��\���ŁA������Ȋ�����������ł����ǁA�t���A�̏�ԂƑ������}�b�`���ĂȂ������݂����ŕ��s�ɋ�J���Ă܂����B�@��������̘b�ł̓��{�X�|�ł͂��������肵�����s�������Ƃ��B���オ�y���݂ł��B
���Z�S�̂ł͂���ς�J�����̎���p���������Ƃ����ɂȂ��Ă܂��āA�F�����J���Ă��܂����B�@��������Ȃ��王�������삷����Ă̂͂�����Ƒ�ς��Ǝv���܂��BHMD���Ď�̓������W���C�����ȂŎāA�������}�X�^�[�X���C�u�ɂ���悤�ɂ��Ȃ��Ⴞ�߂ł��傤���ˁB�@�����_�ł���Ă���悤�ȃg���b�L���O���A���݂����Ȕ������̂͒��o��������ł�����B
�����_�͑���͍l���Ă��Ȃ����ǁA����p�̖��̓A�C�{�ő̌��ς݂������̂Œ��L�p�i������Y�j��ς�ł܂��B���ۂ́A�قƂ�ǒ����������g���ĂȂ��̂����ǁA���\����͍L���ł��B�l�Ԃ����삷��Ȃ�����Ђ��݂Ȃ͋C�ɂȂ�Ȃ����낤����ł��邾���L�p�̃����Y���g���ׂ��ł��傤�ˁB
�}�j�s�����[�^�̖����A��Ń^�[�Q�b�g���B��Ă��܂��Ƃ��B�@���̕ӂ������_�ł͑̌��ς݂ŁA���̃}�j�s�����[�^�̍\���͂��̕ӂf���ĉ�����ڕW�ɃA�v���[�`����悤�ɂ��Ă��܂��B�@�����A�����̒��Ɏ��������Ă����O�Ƃ܂�������H�v������ł��傤�ˁB
���������킯�ŁA���\�e���݂̂����肪���X�ɏo�Ă��āA�����_�ł����킵�Ă݂����Ȃ��Ƃ�������Ǝv�����肵�܂����B�@�����A���{�b�g�̑傫�������ŁA��ԏ�������������Ɨp�I�[�g���ł����A�����_��1.5�{���炢���肻���ł��B�@���̃����_��2�{�ɂȂ�Ȃ�đz�����o���Ȃ��ł��˂��B�T�[�{�������e���B�B�B
���܍l���Ă��鑫�\�������������邽�߂ɂ́A�����_�����������ʂ͑傫�����Ȃ���Ȃ炸�A�����Ȃ���������������炿��ԑ�Ɏ肪�͂���������܂���B���������Ă����Ȃ�����g���C���Ă݂Ă��������ȁ[�Ǝv�����肵�܂����B�@�������A30���ϋv���[�X�͂P�����炢�Ŋ��ق��Ă��炢�����ł��ˁB�@������ăT�[�{�����Ղ��邾���ł�����B
�\�I�I����A�݂�ȂŃS�n����H�ׂɍs���b�ɂȂ����̂ŁA�Ɓ[���Ă��s�����������̂ł����A�Z���T�[�{�[�h��i�߂Ȃ���Ȃ�Ȃ��̂ō����͑ގU���܂����B�@�s�����������Ȃ��`�B(>_<)
�@
�ƂɋA���āA�Z���T�[�{�[�h�̑��������܂����B
UART�̓����g�p�����ɂȂ��Ă����̂����ǁA���͊��荞�ݏ����Ŏg�p����������UART�ŋ��ʂɂȂ��Ă������߂ɕБ��Ńf�[�^�������N�����Ă����悤�ł��B�����g��Ȃ��悤�ɂ�����A�f�[�^�������͉������܂����B�@�悩�����`�B
�Ƃ����̂����̊ԁB�@��M�e�X�g�����Ă����̂ł����A�ǂ������܂������Ȃ��B�@�F�X�Ƃ������čs���ƁA���M���J��Ԃ��Ƃ܂Ƃ��ɑ��M�ł��Ȃ��Ȃ���Ă��Ƃ��킩��܂����B�@����͂܂��A�A�������킩���Ȃ��`�B�@1���i���2��������������Ă܂��B
���T�̃E�B�[�N�f�[����Ƃł��邩�ǂ����킩��Ȃ����A���ɂȂ�����Z���T�[�{�[�h�͏o����낤�B�ƂقفB�B
�@
�����͒��߂āA�S���Еt����PC�����Ƃ��ĕ��C�֓�������A�A�@���������āA�A�@�Ɩ��̌����Ɏv�������B�@���C����オ���đ���PC�𗧂��グ�āA�@�ނ��o���Ă��Ď�������A�A�@��肪�������܂����B�@�܂����S�Ɍ������𖾂��Ă��Ȃ����ǁA�f�o�b�O����ACD�f�[�^�̊i�[�����O�o�b�t�@�Ƀo�O���������炵���BACD���~�߂���UART�̓f�[�^�����Ȃ����M�������邱�Ƃ��ł��܂����B�@�����O�o�b�t�@�����ӂ��UART��FIFO�o�b�t�@���Ă����炵���B�@ACD���~�߂������Ȃ̂�ACD���荞�ݎ��̂��������������肾�ȁB�@�������v���Ƃ͎v�����B�@���āA����ň��S���Ė���܂��B(^�B^)
���W���P�W����
���ɖZ���������`��ɁA��i���ŊԔw���j�A�Ŗ{�i�I�Ƀ_�E�����Ă��܂����肵�ĖZ�����ɔ��Ԃ������Ă܂��B�@�ł��A�Q�����胉���_�������邽�߂ɂ������˂B�B
����A�S�z���Ă���ACD�̊��荞�݂�UART�ɂ͉e���Ȃ��B�@���̕ӂ͗\��ʂ���Ȃ��݂����ł��ˁB�@�}�C�R���v���O���~���O�Ɋ���Ă��Ȃ���Ɋ��荞�ݑS�J�̌������v���O�����i���������Č����Ă�͎̂����̃X�L���ɔ䂵�ĂƂ������ƂŁj����낤�Ƃ��Ă���̂ł������������������ĂȂ��Ȃ��v���ʂ�ɍ�Ƃ��i�݂܂���B
���̒��q�ŁA�}�C�R���v���O���~���O�Ɋ��ꂽ���ɂ͂��̃v���O�������������Ă����ł��傤�ˁB�@�����Ă܂����炭�}�C�R���ɐG��Ȃ��ԂɁu����v�͏������Ă��܂��̂ł��傤�˂��`�B
�����͎�M�̊m�F�ł��B
����܂��Ȃ��Ȃ����܂��s���Ȃ��Ă܂����܂���܂����B�@RPU-100�ɋɊȒP�ȑ���M�v���O����������āA�}�C�R���ɕ����𑗂��āA����ɉ����ĉ����̕����𑗂�Ԃ����肵�ē���m�F���Ă���̂ł����ARS485�͔���d�ʐM�̂��߁A��M���Ă��鎞�ɑ��M������A���M���Ă��鎞�Ɏ�M�����肪�ł��܂���B�@���܂���M�ł��Ȃ��̂͑���M�̃^�C�~���O�̂������Ȃ��`�Ƃ��v���ăE�F�C�g����ꂽ�肵�ĐF�X�����Ă݂���ł����A�����ς�B�B�@���ǂ̓}�C�R�����̃e�X�g�v���O�����ɊԈႢ�������āA���̂����ł��܂��s���Ȃ������̂ł����B�@(>_<)�@�@����A���ꂪ�Ȃ�����Ȃ���ł����A�v���O�������ԈႦ�Ă����̂ł܂Ƃ��ɉ���������͂����Ȃ��̂ɁA�uk�v�Ƃ��ui�v�Ƃ��ug�v�Ƃ��m���ɑ���M�ł��镶�����������肵�Ęf�킳��܂����B�@����A�܂������܂������B
����Ŋ��荞�݂�ADC�����s���Ȃ���A2ch��RS485�̑���M�������Ɏ��s�ł������Ȃ��Ƃ��m�F�ł��܂����B
���͂���ƃp�P�b�g�̑���M�ł��B�ӂ��`�A���݂��x���Ă��܂��ȁB
���W���P�X����
�����͏��Âɏo���B�@���߂ɋA���\�肾�����̂ŋA���ăv���O�����̑����`�A�A�̂͂����������ǁA������ƈ���ł��܂����̂ŁA�������܂łւ�ւ낵�Ă܂����B
���������߂Ă���Ɠ�����悤�ɂȂ������ǁA�v���O�����R�[�f�B���O���ăe�X�g������ĕ��͋C����Ȃ��Ȃ��Ă��܂����B
�@
�}���`�T�[�{�R�}���h�ň�x�ɑ����f�[�^�T�C�Y��128byte���Ƃ�����肪����B�@��x�Ƀf�[�^�𑗂肽���T�[�{����20�B�@���삵�������W�X�^����9���W�X�^�B�@����̓A�h���X���A�����Ă��Ȃ��̂Ŏ��ۂ�4���W�X�^��6���W�X�^��2�ɕ����邱�ƂɂȂ�B
�T�[�{�ɑ���p�P�b�g�̍\����
�w�b�_�[�i7byte)�@+�@�f�[�^(�ő�120byte)�@+�@�T��(1byte)�@=�@�ő�128byte
�f�[�^�̍\����
ID(1byte)�@+�@���W�X�^�f�[�^�@+�@ID(1byte �E�E�E�E�E
�Ȃ̂ŁA�T�[�{����20���ƃ��W�X�^�f�[�^�T�C�Y�͍ő�5byte�ƂȂ�B�@���ǁA�@4byte 4byte 1byte�@�ƁA3��Ȃ���Ȃ�Ȃ����ƂɂȂ�B
���̃T�[�{�𑝂₵�����Ƃ��v���Ă���̂ŁA�ő�4byte�Ȃ�24�܂őΉ��ł���̂ł��̕���������������Ȃ��B�@�ʈĂƂ��Ă͗����Ɨ�����Ă��ꂼ���2������@���l�����邪�A���肪8�T�[�{�ɑ��ė����̕���12�`16�T�[�{�ƂȂ��Ă��܂�o�����X���ǂ��Ȃ��B
���͍��́A�f�[�^�𑗂�T�[�{�����������玩���I��2��ɕ�����Ƃ��A�X�ɂ̓R���v���C�A���X�Ƃ��g���N�Ƃ��A���܂葀�삵�Ȃ��f�[�^�́A�f�[�^�������������ɂ�������Ƃ��A���\�K���ɂ���Ă܂��B�@���̓K���Ȃ̂����Ȃ̂����Ȃ��̂��͂�����Ƃ킩��Ȃ���ł����ǂˁB(^^�U
�p�P�b�g��128byte�͒Z���Ȃ��B256byte�͗~�����B�@�����ƃG���[���N�����\�������܂邩��ǂ������ł����B
���W���Q�P����
���M���R�l�N�^���������̂�SEMB1200A�̓���m�F���Ȃ���A�Ǝv�����̂��Ηj���B�@�ł��A�Z���T�[�{�[�h��D�悵�Ăق����炩���ł����B�@SEMB1200A�̃R���\�[���R�l�N�^���N���X�ɂȂ��Ă�̂�RS232C�|�[�g�ƂȂ��̂ɃN���X�P�[�u�����K�v�Ȃ̂ł����A�䂪�Ƃɂ���N���X�P�[�u���͐̉�������25�s���d�l�B�@���̂����I�X�Ƃ����X�Ƃ���ւ��Ȃ���Ȃ�Ȃ��Ƃ��ʼn�����̉�����W�����N�݂����ȕ��i���@��o���Ă���K�v���������̂Ō�ɂ��Ă܂����B
�������Ȃ��č����y���Ȃ����������A�����͉����ꂩ��N���X�P�[�u���@�ވꎮ�@����̂ɐ��������̂�SEMB1200A�̓���m�F�����Ă������Ƃɂ��܂����B
�Ƃ����Ă��A�d������ăR���\�[���Ȃ������ł����ǁB
 �@�����A�d���ڑ��Ԉ��Ȃ������I�@���ꂾ���႟�����ْ����܂��B�@�փS���ŕ��M�����~�߂��Ă܂��B����m�F���炢�Ȃ���M�Ȃ�ėv��Ȃ��ł����ǂˁB�i�����j
�@�����A�d���ڑ��Ԉ��Ȃ������I�@���ꂾ���႟�����ْ����܂��B�@�փS���ŕ��M�����~�߂��Ă܂��B����m�F���炢�Ȃ���M�Ȃ�ėv��Ȃ��ł����ǂˁB�i�����j
 �@�ӂށB�B�����܂����ˁB
�@�ӂށB�B�����܂����ˁB
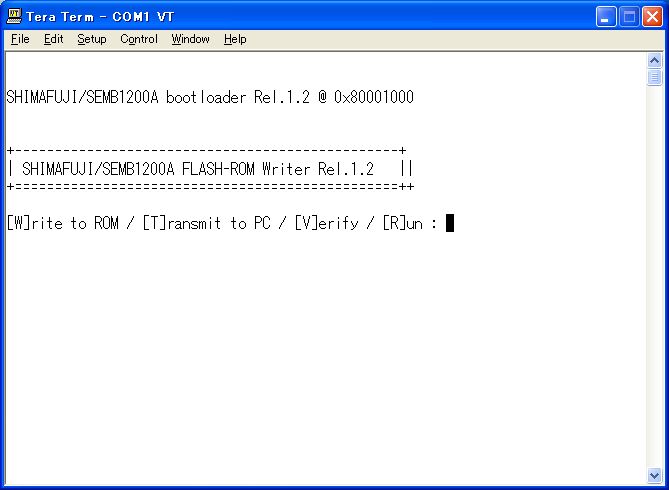
������Ė{���Ɂ@W�@T�@V�@R�@�����R�}���h�Ȃ���ł��ˁB�@(^_^;)�@�������[�_���v�Ƃ�IO���j�^�[�Ƃ��ł�������̂ɁB
SEMB�ɂ��Ă��R���\�[���R�l�N�^��D-sub9��݂̃I�X�R���^�N�g�B�@PC����USB-COM�A�_�v�^�Ɠ����R�l�N�^�ł��B�@�Ȃ̂ŁAD-sub9��݂̃��X�[���X�̃N���X�P�[�u������������̂����A�A�A�@
USB��Dsub9���|Dsub9ҽ���ϊ���Dsub25ҽ�|Dsub25�����۽��Dsub25ҽ�|Dsub25�����ϊ���Dsub9���|Dsub9ҽ���X�g���[�g��Dsub9ҽ�|Dsub9����SEMB1200A
�Ƃ�����芷������H���Ċ����ł���Ɛڑ��ł����̂ł����B�@�ł��ASEMB�ɕt���̃R���\�[���P�[�u���̌������X�g���[�g�ɕύX����P�[�u��1�{�Őڑ��ł����ł����ǂˁB
�����ꂪSEMB�Ɏ�������Ă���R�l�N�^�̃P�[�u�����n�E�W���O�B�@���������������̂Ńz�[�U���̖��\�����H����g���Ȃ������B�@�͂t�����邵���Ȃ����ȁ[�B
 �@
�@
�����JST�̃z�[���y�[�W���甃�����̂����Ǎŏ��w���P�ʂ�10�B�@�R���^�N�g�ƍ��킹�đ������݂�3500�~���炢���܂����B�@�������Ă悭����ƁA�H�t���Ŕ����Ă��悤�ȁB�B�@���������ĕK�v����������������(^_^;)�@�i�����JAE���������ȁH�j
���ā`�A�J���������Ȃ���ȁ[�B
���W���Q�Q����
�����SEMB1200A�̓d������ꂽ�������������A�����͂܂��Z���T�[�{�[�h�B
�������������Ƀp�P�b�g�w�b�_�[����͂��ăf�[�^�����o����悤�ɂȂ����̂ŁA�f�[�^���āA����ɉ������f�[�^���o�͂ł���悤�ɂ����B�@�����̂����ɂ����܂ł����肾�������A�܂��F�X�����Ăł��Ȃ������B�@�Ƃ肠�����́A�R�}���h�ɉ����ĉ����x�Z���T�[�ƃW���C���Z���T�[�̃f�[�^�𑗐M�ł���悤�ɂ����̂ŁA�Z���T�[�{�[�h������O�ɂقږ߂����B
�Ȃ̂ŁA�����̓����_�̃T�[�{�P�[�u���̍�蒼������낤���ȁB�@�Z���T�[�{�[�h�A�A�A�Ƃ������A��������T�[�{�o�b�t�@�{�[�h���A�@�͂������炭�����肻���B�@�����Ƃ����Ƃ��i���Ăǂ�ȂƂ����H�j�Ƀ����_�����Ȃ��܂܂Ȃ̂ŁA��U�͍��̃v���O�����œ��������_�������Ă��������Ǝv���B�@���܂łƈႤ�̂�SPI�ɐڑ����������R���g���[��������̂ŁA�p�\�R���Ȃ��ł������_���������ł���悤�ɂȂ�B
��������������}�j�s�����[�^�͂܂��������ĂȂ����ASEMB1200A���V�O�}�ɂȂ����Ă̂�������肽���B�@�Ȃ���肽�����Ƃ����W�������Ȃ̂Ɏd���͖Z�������Ă܂��ċx�݂����Ă��Ȃ��̂��炭�Ȃ̂��B�@�܁[�������ȁ[�[�B
���W���Q�R����
�Z���T�[�{�[�h�̂�����̖�ڂƂ��āA��������BIT�o�͂����o���K�v������܂��B�@LED�����点����A�J�����̉�p��ւ��ƃz���C�g�o�����X�̐�ւ��ɐڑ�������B�@���ƁA�W���C���Z���T�[�������x�Z���T�[���d����3.3V�Ȃ̂ŁAAD�ϊ��̊�d����3.3V�ɂ��܂��B
����ŃZ���T�[�{�[�h�̂͂t����Ƃ͖{���ɏI���B
���Ƃ̓����_���̔z���ł��B�@�T�[�{�P�[�u������蒼�����I�@�Ǝv�������ǁA�����_�̑��\���̕ύX��ژ_��ł���̂ŁA�\���ύX������܂��P�[�u������蒼���Ȃ���Ȃ�Ȃ��B���̃T�[�{�̃R�l�N�^���Ĕ����̂��ʓ|�Ȃ̂Ŗ��ʌ����������Ȃ��Ȃ��`�A�����P�[�u���쐬�߂�ǂ������Ȃ��`�A�A�A���Ă��ƂŁA�P�[�u���̍�蒼���͎���߂āA�t�H�[�~���O�����Ȃ������Ƃɂ��܂����B
���ƁA�}�j�s�����[�^�̔z�������ǁA�T�[�{�o�b�t�@�ɂȂ����͓���3�Ɨ���̃}�j�s�����[�^�͕ʉ���ɂ���\��Ȃ̂ŁA�r�̔z��������Â邶��Ȃ��āA���T�[�{�̓d���{�[�h���番��ł���悤�ɉ����P�[�u���Ɠ�҃P�[�u�������܂����B�@�d���{�[�h�ɂ��R�l�N�^�lj��B�@����Ǝ�̃T�[�{�ɓd��������܂����B(^^�U
 �@�@
�@�@
�Z���T�[�{�[�h�ʼn�p���ւ�����悤�ɂȂ�܂����`�B�@���Ă��A���܂܂ł��Z���T�[�{�[�h��LED�|�[�g���Ԃ��ĉ�p��ւ�������Ă�����ł����ǂˁ[�B
������Ǝ��s�Ȃ̂́A�Z���T�[�{�[�h�������_�ɑg�ݍ��ނ�ISP�P�[�u�������t�����Ȃ����ƁB�@���̂����ɃR�l�N�^�̈ʒu��ς��Ă��������Ȃ��`�B�ł��A�����ꏊ���Ȃ��ȁB
���������ASEMB1200A�p�ɔ�����JST�̂��������R�l�N�^�B�@����͍������_�Ŏg���Ă���J�����̃R�l�N�^�Ɠ����ł����B�ǂ����Ō����o�������������ǁA�H�t���̂��X���႟�Ȃ������݂����B�@���ʂȏo���Ȃ��Ă悩�����B�@����̃J�����ւ̔z���͐���������R�l�N�^�R���^�N�g���g�����Ƃ��ł��܂����B�@�v�����Ƃ���A���������Ĉ����H��͎g���܂���ł����B
�����͔������ŐV�h�ˏH�t���@SEMB1200A�p�̕��M�t�B���Ƃ����ނƂ��A�F�X�B�@���������I�������\�b�R�[�A���ă}���V�����̗�����ł��B�@���{�b�g�^����͌��ɍs���Ȃ��ȁB
���W���Q�S����
�\��ʂ�V�h�ˏH�t���֔������ցB�@�ł��A�H�t���ł͂낭�ɔ������ł��܂���ł����B��{�A�≮�X�Ȃ�œ��j���ɋx��ł�X��������ȁ`�B
SEMB1200A�̕��M���ɍs�����̂����ǁA�ǂꂭ�炢�̃T�C�Y�̕��M����������̂��H
���Ɂu�M��R���W��/W�ȉ��ɂȂ�q�[�g�V���N���K�v�ł��B�v�Ə����Ă���B����A�V�}�t�W�d�@�̐��i�Љ�ɂ͍ڂ��ĂȂ���ł���ˁB�����O�ɒm�肽�������Ȃ��B�@�@8��/W�ȉ����Č��\�ȕ��M���v����Ă��Ƃł��B�����ƃT�C�Y���v�Z���Ă݂�ƁA�A
�܂��A���M�\�ʐςŌv�Z����ƁA���M�̕\�ʐ�A��
A�@=�@-1900�~��+28000
�Ȃ̂ŁA�Ƃ�8���������12800mm^2�@���ōl����ƁA���80mm�p�̃A���~���K�v�B�@�������A���_�l�Ȃ̂ŕ��ŕ��M����̂͂�����Ɠ�������B�A���~�P�[�X�Ɏ��[���āA�P�[�X�ɐڑ�������Ă̂�������������Ȃ��B
��̐ςŌ���ƁA�O���t����40000mm^3�@�ƂȂ����BCPU�̃T�C�Y��33mm�p�Ȃ̂ŁA35mm�p���Ƃ���ƍ�����33mm�B�@�قڗ����̂��[�B
���͉��x��35���܂ōl���Ă�8��/W�炵�����ǁA������Ă܂����[�Y�i�u���B�����������������̂ɂ���ȑ傫�ȕ��M���K�v�Ȃ�āA�䖳���ł��ˁB
�Ƃ͂����A����Ȃł������M������V�O�}�ɍڂ����Ȃ��Ȃ�̂ŁA�v�Z�l��O���ɒu���A���������̕��M��T���ɂ����܂����B
 �@������A38�p����10�@38�p����20�@50�p����10
�@������A38�p����10�@38�p����20�@50�p����10
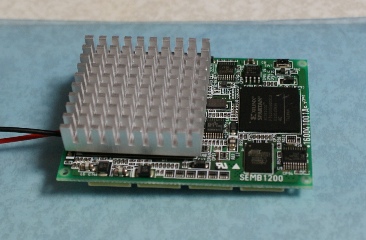 �@��ԏ������̂����Ă݂��B
�@��ԏ������̂����Ă݂��B
����œd������Ă݂�ƁA�����̃R���\�[���œ��͑҂����Ă��邾���ŁA���M�͏\���g�����Ȃ�܂����B�G��Ȃ�������[�Ȃ����ǁB
�P�[�X�ɓ��ꂽ��A�K�V�K�V���������肷��ƁA���̕��M���ᑫ��Ȃ��ł��傤�ˁB�t�@���������ŏ\�����Ǝv���B
�@
SEMB�ɍ̗p����Ă���JST�̂��������R�l�N�^�̈������ł��Ȃ��������ǁA����Ȃ̂������Ă��̂Ŕ����Ă����B

�n�[�t�s�b�`�T�C�Y�̃R�l�N�^�p�̈����H��B�R���^�N�g�̈��������̌a��1�~���܂őΉ����Ă���炵���B����ň����ł������B
�������ENGINEER�̐��������y���`PA-09�@�������EMGINEER���ĂȂႢ�H���Ďv�������ǁA�������ăl�W�U�E���X�̃��[�J�[�Ȃ�ł��ˁB
3980�~�������̂ŖړI�̃R���^�N�g�������ł��邩�ǂ������\�����ׂĂ��甃���悤�ɂ��܂��傤�B�@SH�R�l�N�^�����܂��������ǂ����A�܂������Ă܂���B(^_^;)
�@
�����A�V�h�̃��h�o�V�Ɋ�����̂ŁA���˂Ă��甃��˂Ȃ�Ȃ��ȂƁA���ׂȂ���Ȃ�Ȃ��ȂƁA�v���Ă��f�W�^�����t�F���Ă��̂ł����A�X�����ꐶ�����l�������č������������ƑE�߂�̂ŁA�������Ń\�j�[�̃�200���Ă��܂��܂����B�Y�[�������Y�L�b�g�@50000�~�|�C���g18%�A�@�܂����������݂����B
�����AW�Y�[�������Y�L�b�g�̑��݂�m��Ȃ������I�I�@�������̕����悩�����ȁ[�B300�~���̖]�������Ă��̒l�i�Ȃ璴�����B�@����������Ƃ��͂����ƒ��ׂȂ���ˁB�@�ł����A�����ɂ͂��炢���̌Â����t�J�����@�~�m���^��5700i�@�Ƃ����A���N�̑ʍ�i�@�ƃ~�m���^�ɋ߂Ă����J�������m�̗F�l�������Ă����j���L��܂��āA�@���̃����Y���g�����̂ł܂��������ȁB210�����ǖ]�����L�p�������Ă�̂ŁB
�����ƃ��V�X�e���ɂ��o�[�W�����������āA�����̂̓o�[�W�������Â��Ďg���Ȃ��낤�Ȃ��`���Ă͂��߂�����߂Ă����ǁA���Ă݂��炿���Ǝg���܂����B�@����10�N�ȏ�O�̃����Y�Ȃ̂ɂ������Ȃ��`�B�@�\�j�[�͖{���Ƀ��������p������ł��ˁ[�A�\�j�[�炵���Ȃ����������邯�ǁA�悩�����B
���Ȃ݂Ɏ��͑S�R�܂������J�������m���Ⴀ��܂���B����������t���g��������t�ł̎B�e���C�����悭���āA�f�W�J������ɂȂ��Ă����炭�́A���̂���������t���g���Ă܂����B�@�f�W�^�����t���o��肾��������A���������Ǝv�������ǁA�J������10���~�o���Ȃ��Ă��̂܂܂ɂ��Ă܂����B
���̂��юg���Ă����R���p�N�g�f�W�J������ꂽ�̂Ŏ��̂��ɍs�������A�R���p�N�g�f�W�J���́A�V���b�^�[�Ƀ��O������̂��C���������āA���X�ő��k������u���t����Ȃ���_���ł���[�v���Ă��ƂŁA�Ƃ��Ƃ��f�W�^�����t�ɂ��ǂ蒅�����Ƃ����킯�ł��B�����Ȃ������B
5���~�Ȃ̂�1000����f�ł���B�܂������B�B�B�@CF�J�[�h�́i�\�j�[�Ȃ̂Ƀ����X�e����Ȃ��I�j�H�t����4GB��2100�~�Ŕ����܂����B�@ϲ��SD�̕��������ȁB
���W���Q�T����
�������v�f�ƈ���Ă����Ղ�c�ƁB�B(�[�[;)�@�܁A�������ǁB�B
���āA�����͉������Ȃ���Ȃ�Ȃ��������H����܂莞�ԂȂ����炳�����ƏI��邨��ŁB
�Ƃ������ƂŁA�悲�듮��m�F����SPI�C���^�[�t�F�C�X�ł̖����R���g���[���̃f�[�^��M���t�����荞�ݎd�l�ɏC���B
 �@�����������Ƃ��������Ȃ��`�B�B
�@�����������Ƃ��������Ȃ��`�B�B
���܂ł�
�@SS��L��
�A200��s�̃E�F�C�g
�BSPI�Ńf�[�^�]���~8
�CSS��L��
�Ƃ����菇���������ǁA200��s�̃E�F�C�g��ASPI�f�[�^�]�������҂������[�v�ʼnĂ����B�@��������荞�ݏ����ɂ���B�܂��ȒP�Șb�Ȃ��ǁA
��SPI�f�[�^�擾�J�n���[�`����
�@SS��L��
�A�����ؾ�ā@200��s���̃J�E���g�Ŋ��荞�݂�������悤�ɃZ�b�g
�B���������
����������荞�݃��[�`����
�@������į��
�ASPI���荞�݃Z�b�g
�BSPI�f�[�^�]������
��SPI�]���������荞�݃��[�`����
�@�f�[�^��荞��
�A8�o�C�g�]�������Ȃ�I���B�����łȂ���Ύ���SPI�]������
�Ƃ܂�����ȋ�ɑ�ώ�Ԃ�������L�q�����Ȃ���Ȃ�Ȃ��B�@�ł��A�҂����[�v���Ȃ��̂�CPU�̐�L���Ԃ͒Z���Ȃ�B�@�͂܂�ƃC���Ȃ̂�SPI�̐M�����I�V���Ŋm�F����ƁA���Ȃ����Ɠ����悤�ȐM����������̂ő������v�ł��傤�B
���Ă��ƂŁASPI�ǂݍ��݂̓T�[�{�ւ̎w�ߎ����Ńf�[�^��荞�݂����āA��M�o�b�t�@�ɍŐV�f�[�^���������ݑ����邱�Ƃɂ���B�@�Z���T�[�l�ƈ���ĕω��͒x���̂Ńo�b�t�@�͈�B�������݂Ȃ���ǂݍ���ł��܂��s��͂Ȃ��ł��傤����B
����ŁARPU-100����v���R�}���h�𑗂�Ζ����R���g���[���̒l����荞�߂�B�@���W�R�����{�b�g�ɂ������͂Ȃ����ǁA�R�~���j�P�[�V�����c�[�����Ă��ƂŁB�@�ł��A����Ń}�m�C�I�[�Ɛ킦��悤�ɂȂ邩���B(^_^;)
RRC-R11�̃P�[�u���Z���Ȃ��B�@�������ǂ��ɂ���̂����Ă̂͂܂��l���ĂȂ��������ǁA�Z���T�[�{�[�h���������牄���P�[�u���͕K�{�ł��ˁB�����̓P�[�u����肩�ȁB
�@
���A��������A�N�Z�X�J�E���^�[��20000�z���B�@�i�����S�R�Ȃ��̂Ő\����Ȃ��ł��B<(_ _)>�@�����Ƃ����Ƃ���܂�܂��̂ō���Ƃ���낵�����肢���܂��B
���W���Q�U����
�����͔�r�I�����A���Ă��ꂽ�̂ɁA��肽�߂��h���}��������A�h���}��������A�����������ĂĖ��ׂɉ߂����Ă��܂����B
���Ȃ���SEMB���R���\�[���ɂȂ��̂ɕϊ��Ɏ����ϊ��Ő����Ƌ�J�����̂����ASEMB�ɂ��Ă�Dsub�ϊ��P�[�u���̎��e��ύX����X�g���[�g�P�[�u���ł��Ȃ���Ǝv���ĕϊ��P�[�u���̎��e��ς��Ă݂��B
����ƁA�Ȃ����Ȃ���Ȃ��H�H�H�@�����������Ȃ��`�B�B�@���ׂĂ݂�ƁA�Ȃ�ƁA�N���X�Ǝv���Ă���25��݃P�[�u�����X�g���[�g�A�X�g���[�g�Ǝv���Ă���9��݃P�[�u���i���X-���X�j���N���X�ł������B�@���ǁA�N���X��9��݃P�[�u������{����Ȃ������킯���B(^^�U�@���ʂȍ�Ɓi���Ăقǂł��Ȃ����j�����Ă����킯�ł��B�@�ƂقفB�B
�Z���T�[�{�[�h�ɂƂ��������Đ����Ɨ��B�@���������Ă݂�ƁA7���̔�����A�T�[�{�̃t�@�[���A�b�v���������7���͂��߂��烉���_�͔�������Ԃł���B����2�������o�̂��B�@������ƖZ���������肵���̂����A2�����͒����Ȃ��B
���W���Q�V����
���������́A�ƈӂ������ċA���Ă��܂����B�@���������̓Z���T�[�{�[�h�������_�ɑg�ݍ��ނ܂ŐQ�Ȃ����ƁB�B
����̓X�^�[�g��������Ȃ��āA�����������A����ł��ŏI�I�ȃZ���T�[�{�[�h��RPU-100�̒ʐM�t�H�[�}�b�g�����������肵�Ă��܂����B�@���̌��ʂ��v���O����������������Ȃ̂Ŕ�r�I�X�^�[�g�������₷����Ԃɂ͂Ȃ��Ă܂��B
�ł��A���ѐH�ׂ鎞�͎B�肽�߂��h���}������B
�ŁA���ǒ��肵���̂�23������B�@����̏����������ď����Ƀv���O�������쐬�B�@������RPU-100���̎�M�e�X�g�v���O�������쐬�B�@AD�ϊ������l���Z���^�[�l�����߂�0�𒆐S�Ƃ����l�ɂ�����A�`�F�b�N�T���������肵�ă����_�ɑg�ݍ��߂�悤�ɂ��܂����B
�܂��A�Z���T�[�̃L�����u���[�V���������R�}���h�������Ƃ��A�`�F�b�N�T���͏o�͂��邯�ǁA��M���ł̓`�F�b�N���Ă��Ȃ��Ƃ��A�F�X����܂����A�Ƃ肠�����Z���T�[�{�[�h�̏�O�{�����R���g���[����M�܂ł͊������܂����`�B�@�ӂ��A�A�A�@�ق�Ƃ͌̏�̏C�����ł��������Ȃ��ǂ˂��B�B
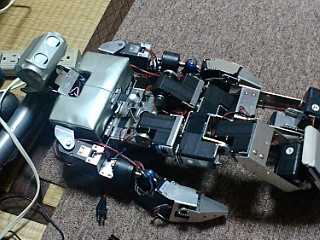
�����āA�����_�ɑg�ݍ���ŁA�d�������B�@�u�W�����r�K�f�L�}�V�^�B�v�@�����`�@�v���Ԃ�̃����_�̐��B�@�����_�N�A�Ђ����Ԃ�[(^�B^)�@�����_�́A�Z���T�[��g�ݍ��ޕ����i���j�̊W�ɓ����镔�i�i���K�j�ɃX�s�[�J�[��g�ݍ���ł���̂ŁA�Z���T�[�{�[�h���O���Ă���Ԃ̓X�s�[�J�[���O���Ă�����ł��B
 �@�����_�N�Ƌv���Ԃ�̑ΖʁB
�@�����_�N�Ƌv���Ԃ�̑ΖʁB
���āA���̓����_�̃v���O�������C�����ăj���[�Z���T�[�{�[�h���Ȃ��Ȃ���B�@���ƁA�����R���g���[���̃P�[�u���쐬�Ǝ�M�@���t���B�@�����āA�}�j�s�����[�^�̑���v���O�����ƁA�A�A�@�ł��A�}�C�R���v���O���~���O��Y��Ȃ������ɃT�[�{�o�b�t�@���d�グ�Ȃ���ˁB�@�@�����SEMB���A�V�O�}���B�@�Z�����Ȃ��B
���W���R�O����
�j���[�X�ł��B
����x���A���s�ݏZ�̃����_����(3)�����������ł��ďd�̂ƂȂ�܂����B
�����_����̓j���[�Z���T�[�{�[�h�̎������ɁA���s���̃W���C���T�[�{�f�[�^���̎悵�悤�Ƃ����Ƃ���A����s�S���N�����A�����ɓ]�|���܂����B�@�]�|���Ɍ㓪�������̋r�ɋ����ł����A��̍����܂ꂽ�͗l�ł��B
�Ɛl���T�[�{�̃g���N���I�t�ɂ����Ƃ���A���G�̃T�[�{���s�N�����ۂ��݂��A�m�F�����Ƃ���z�����ؒf���Ă����͗l�ł��B
�@
�Ƃ������ƂŁA�����_�͏d�̒��ł��B
���j���͑��ɏo���ł����B�ߌ�ɐV���l���o�������Ƃ���A���É��ӂ�ō��J�̂��߁A��~�B�@��40���x��ŐV���ɓ������܂����B�@���A�Ō��n�ł̎d���͖�15���B�@�����Ƃ����Ԃɉ��U�ɂȂ��Ă��܂��܂����B�@����̎d���͂��܂����Ƃ̋߂��ŁA�@���̉Ă͋x�ɂ����Ȃ������̂ŋA�Ȃ��Ă��Ȃ������Ƃ������Ƃ�������Ƃɔ��܂�ɍs���܂����B�@���Ƃ̓l�b�g�����Ȃ����A���������A�����̂Ƀl�b�g������PC��������Ă̂��ȂȂ��Ă��Ƃ�PC�ANET�A���{�b�g�W�͂Ȃ���Ȃ��ł����B�@���A�v�l�����͐F�X���܂������ǁB
�����̖�ɂ�����ɖ߂��Ă��ă����_�̃v���O�����Ƀj���[�Z���T�[�{�[�h���Ȃ��R�[�h�������Ă���܂����B
�Ƃ��낪�ǂ����W���C�������܂��Ȃ��B�@���x�h���t�g���Ђǂ��Ƃ����\�͕����Ă������ǁA�����������Ƃ��m�C�Y������Ă���̂��A�ӂ�����傫���B�I�t�Z�b�g������̂��Ǝv���ăL�����u���[�V���������Ă��S�R���肵�Ȃ��B�@�V�t�g���Ă�������I�t�Z�b�g���Ǝv�����ǂȂ��`�B�ǂ������������ł��B�Ƃɂ������̂܂܂���g���Ȃ��̂ł���������ƒ������K�v�ł��B
���̑O�Ƀ����_�̎�̍��ƃT�[�{�P�[�u�����Ȃ��ƁB(>_<)
�ݐς���Ƃ���Ȋ������@��������Ȃ��Ȃ��`�B
�Z���T�[�o�͂͂���Ȋ������@�^�l������悤�ɂ݂͂�����ǁA�Ȃ��Ȃ������ł��Ȃ��B(�[�[;)�@���[�p�X�t�B���^�[�v��݂������Ȃ��B
�Q�S���ԃe���r�����Ȃ����ƁB�@��N�͑S�R���Ȃ����lj�������X�C�b�`�������āA���N�͈ꐶ�������Ă��܂����B
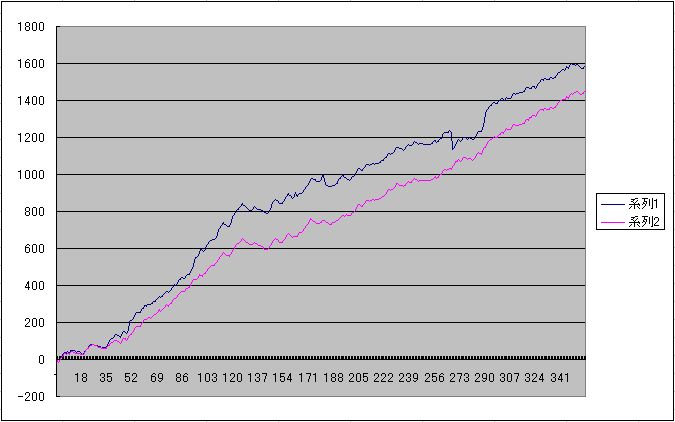
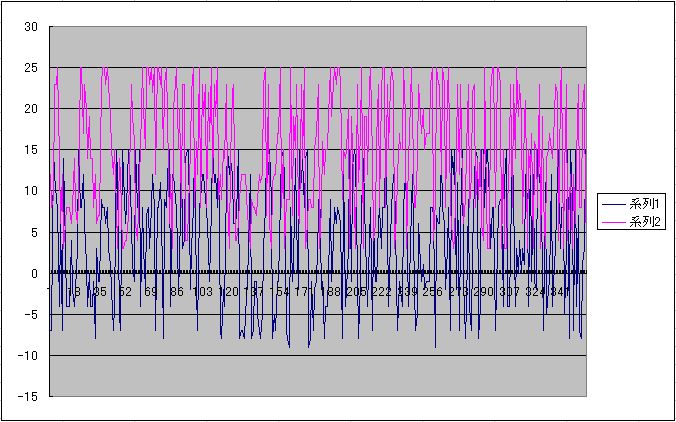
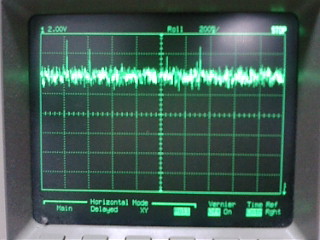
�W���C���̃m�C�Y��AD���͕��Ŋϑ������Ƃ���A����Ȋ����B������p-p��20mV���炢�B�i��������100����1�j�@�g�債�Ă����ƁA70ns�����̐����g�݂����Ȃ̂�������B70ns���Ă�����14MHz���傢�A�Ƃ������Ƃ�ATMEGA128�{�[�h�̃N���b�N���g���ł��B
AD�R���o�[�^�̃t���X�P�[����3.3V��10bit�ŕϊ����Ă��܂��B�@�f�[�^��p-p�����20�Ȃ̂ŁA64mV���Ă��ƂɂȂ�B�I�V���ł̐��l�Ƃ�����ƈႤ���ǂȂ��B�v���O�����Ō��Ă�͎̂擾������25ms���炢�Ȃ̂ŁA�I�V���Ńs���R�s���R�ƌ����Ă���q�Q�����Ă���̂�������Ȃ��B�@
���������������Ȃ��A�A�Ƃ������ƂŁA�W���C���o�͂�AD�R���o�[�^���͂̊Ԃ�LPF�����Ă݂܂����B�J�b�g�I�t���g�����v����Ⴂ��B�ł��قƂ�ǔg�`�ɕω��Ȃ��B�@�萔��ς��Ă݂����Ǖω��������܂���ł����B�@�ǂ���炱��̓A�[�X���C���̃m�C�Y�̂悤�ł��B
�m�C�Y�������̂���߂āA�Ƃ肠�����A2�r�b�g�قǎ̂ĂĂ݂܂����B����\���m�C�Y���x�����傫�����Ė������܂��B
�L�����u���[�V���������Ȃ��ŁA�������Ă݂��̂�����B��
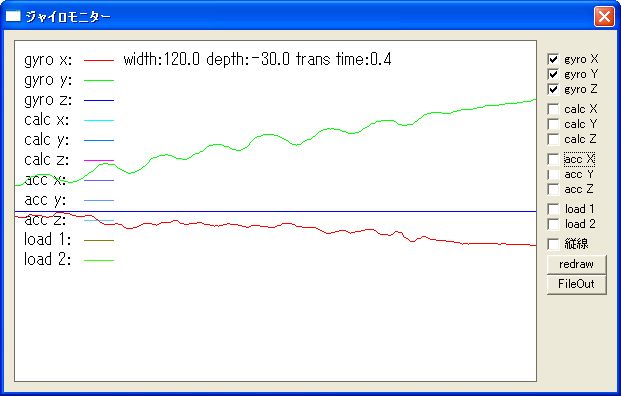
���[��B�B�@�ꉞ�͓����͌�������ǁA������Ƃ���ڂ��Ȃ��B�@�ȂA���̃Z���T�[�̓t���X�P�[����500deg/s���L��炵���̂ŁA�������炢�̓��삾�ƃR�����炢�̓����ɂ��������Ȃ��Ȃ��Ă��܂���ł��ˁ[�B
����������ƍH�v���K�v�̂悤�ł��B
���A���ƁARCC-R11�̉����P�[�u�������܂����B�����̃R�l�N�^�͎�ɓ���Ȃ��̂�JST��ZHR�R�l�N�^�𗘗p�B�@�R���^�N�g�̈����ɂ͂��Ȃ��������ė������������y���`PA-09���g���Ă݂܂����B�@���̍H��͂�����ƃN�����v�������Ԃ�C����������Ȃ��B�@�N�����v�����܂܂��ƃn�E�W���O�Ɏ��܂�Ȃ������̂Ő����y���`�ŏ������`���Ă��K�v������܂����B���`���鎞�ɐ����]���ăR���^�N�g���Ԃ��Ă��܂�����B�B�@�܂��`�A�M���M���A�E�g���炢�Ŏg���܂����B�v�e�N�j�b�N�ł��B
SEMB�̃R�l�N�^SHR�͂܂������Ă܂���B