
�J�������C���f�b�N�X��
�O�̃y�[�W��
���Q���P����
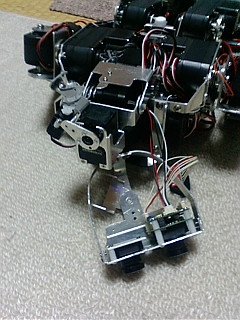
�C�t������Q���ɓ˓��B�@�P���͉�������Ă��낤�Ȃ��`�A�A�@���[�ƁACDT�ł̃��x�����O�Ǝp���ڍs�ł����ˁB���������Ԃ��Ƃ���Ȃ�ɐi���͂������悤�����ǁA�C�}�C�`�����͂Ȃ��Ȃ��B�܂������z���Ă��Ȃ��Ƃ������Ƃ��낤���B
�l�O�Ńf�����悤�ɂ��邽�߂̈�ŁA�����オ�胂�[�V����������Ă݂��B�@�p���ڍs�ɂ�闧���オ�蓮��͂܂����炭�����肻���Ȃ̂ŁA�Ƃ肠�����̓��[�V�����Đ��ŗ����オ���悤�ɂƂ������ƂŁB�@�܂��A�Ȃ�̕ϓN�����������オ�胂�[�V�����Ȃ̂œ���Ƃ��͖����Ȃ̂����A�@�l����ƃ����_���瓷�̂̂Q�����폜���Ă��痧���オ�蓮����s�����͍̂��������߂Ă������B�@�r�̒����Ƃ��߂̓����̊W�ŁA���̎������ł͗����オ��Ȃ�������ǂ����悤�Ɩ����ɐS�z���Ă����̂����A�X�J�ł��������B�@�p���ڍs�ʼn��𒍈ӂ��čl���˂Ȃ�Ȃ�����m�邱�Ƃ��ł����B�@�����Ă���������̗����オ�����낤�B
�������A�C�����Ǝ�̃l�W�q���[�Y�͔��ł��܂��ĎN���N���B�@�]�|��g�̉e���ŁA���̕��i�͂Ђ�Ȃ����Ă��܂��ăl�W���O���O���B�@���܂��ɍ��r�̐�[�̃T�[�{�ւ̔z���͐ؒf���O�ł�������イ�R�}���h�R����N�����n���ł���B�@�܂��ɖ��g�n�w�B
�����̓����e�i���X������Ă����Ȃ��ƁA������ł��ˁB
�������Ɨ����オ�胂�[�V����������������A���͉I��H�T���ł͂Ȃ��A�����W�̈ړ��̂��߂̏㔼�g-�����g��������������B�@����͏����ʂ��痧�ʂւ̈ڍs�ɕK�v�Ȃ̂ł��邪�A���m���E������ɂ��K�v�Ȏd�g�݁B�@�������Ɂh�J�����Ń��m�̍��W��ǂ��āA�Ώە����E���グ��h�E�E�E�E�E�E���ĂƂ��܂ł͖������Ȃ��i���܂܂ł̎��тł͖����ł��˂��j
����͎��̍��W����ԏ�̂�����W�ֈړ������悤�Ƃ������A�r�̒���������Ȃ���Ή����g�p�������ă��[�`���O������s���Ƃ������́B�������A��֎��L���čs���Ă��w�L�т͂��܂���B(^^�U�@�@��ɏ��ʋ߂��ւ̃��[�`���O��z�肵�Ă���̂����A�d�S����s���A�K�v�ɉ�����J1Z�������s���̓���ƂȂ�̂ŁA�g�̐���i���������̂��u����v���Ă����̂��킩��܂��j�Ō������Ă������ۂ́i����ł́j�W�听�̂悤�Ȃ��́B�@������ƑO�ɂ̓��[�`���O����̂��߂̏㔼�g�Ɖ����g�̋���������ǂ̂悤�Ɏ�������̂������ς�킩��Ȃ������̂��v���ƁA���S�[�����̂�����܂��B�i�܂��ł��Ă܂����j
�ł����A�����͂����x���̂ŕ��C�ɓ����ĐQ�邱�Ƃɂ��܂��B�@���������[�B
���Q���Q����
�����͔������ɏo�����邩�獡�T���͍���������Ƃł��Ȃ��B�@�Ȃ̂ŁA�����璣����č�ƊJ�n�B
�܂��̓����_�̃I�[�o�[�z�[���B�@�l�W�q���[�Y�����ւ��āA�T�[�{�̃P�[�u���̒f�����C��������B�B�@����������Ƃ͏����ɐi��ł���Ӗ��y�����B
���ɂ���������̗����オ�胂�[�V�����B������T�N�T�N���ƍ���ČߑO���Ƀo�L���[���֘A�̍H������ā`�@�Ƃ����\�肾�����̂����A������ۂ����[�V�������ł����̂��[��(�[�[;)�B�B�B
�Ƃ����̂͂������n�̎p���ł͑��̗�����������Ă��܂��P�[�X�������āA�p���l�����肵�Ȃ��ꍇ�������i�炵���j�@�K���Ȏp���l�����Ă��������Ȋi�D�ɂȂ��Ă��܂��B�ŏ��͋t�^���w�v�Z�̃c�����Â��Ă�������Ԃł͂��܂��v�Z�ł��Ȃ��̂��Ǝv�����̂����A�����ł͂Ȃ������i�炵���j�B
���ǁA�ߒl����t�Z�������p������͂��邱�Ƃňꉞ�̓��[�V��������ꂽ�̂����A�A�A�@����Ⴀ�A����������̎p���ڍs�͍r�ꂻ�����B�@���Ƙr�p�������ٓ_���������B�@���p���ƈ���āA�r�p���͂��܂蝆��ł��Ȃ��̂ŁA�܂��ϊ����ɂ͉��ǂ̗]�n������悤�Ɏv���B�������p���ł͂��̕ӂ�̊Â����I�悵���������B
���ǁA�����قƂ�ǂ̎��Ԃ����[�V�������ɗ����ɂ͈���x�ɂ����郂�[�V��������o���オ���������B(>_<)
�[��ɂȂ�ƃo�L���[���͑����̂��ߍ�Ƃł��Ȃ��Ȃ邩��A�v���O�����𒆒f���ăo�L���[��������Ă݂��B�@�p���`���O���^���ɂ��āA�������邽�߂Ƀp�b�L�������͂ɓ\�����̂ŁA����Ŗ��S���낤�B�@���Ă܂��͊�p�[�c����B
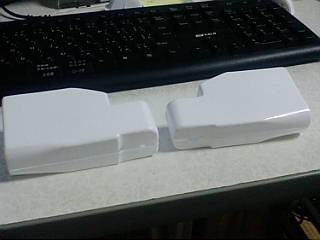
���[�[�[�[�A���炵���z�����Ղ�B�@�����܂ł͐����I�@���Ɍ㓪���p�[�c�B

�摜���s���{�P�����A�o�L���[�����s���g���Â������B�@��C�R��͖��������Ȃ̂ŁA�،^�̖��ƒf��B�㓪���ɂ̓I�[�o�[�n���O�ɂȂ��Ă���̂����A���ꂪ���Ȃ̂��H�@�����z�肵�āA�I�[�o�[�n���O�ɂȂ�Ȃ��悤�ɃX�y�[�T�[�����čēx�o�L���[���B

�z���g�ɖ،^�̌`�̂������ǂ����͂킩��Ȃ����A���x�͐����B�@�v���̔M�����̋�����m��Ȃ��ȁB�@�������͂�����ƃv�����������Ȃ��Ă��܂����B
�ŁA�،^����O�����Ƃ����̂����A��ʕ��͂ǂ����Ă��O��Ȃ��B0.5�~���ł�����Ƃ��̓X�����Ɣ������̂ɍ���͖����x���������A�v����1.0�~���B�@������������Ă���v����������Ă��܂����B�@�������z������Ȃ������悤���B�@����ȏ�͔������z��傫���������Ȃ��̂ŕ����^�ɍ�蒼���������������ȁ[�ƁB�@
���Ȃ݂ɃA���~�̃p���`���O���^���i����1�~���j�ł��z���͂̂����ŏ����ό`���܂����B
���[�V�������ꉞ�I����āA�o�L���[�����g���C���Ĕs�ށA�@�ŁA����Ɩ{���ɂ�肽�����[�`���O�̃v���O�����ɒ���Ȃ̂����A�܂��������ŃR�[�f�B���O�܂ōs���Ă܂���B
���܂ł́A�㔼�g�i���̎p���͉����g�ŊǗ����Ă���̂ŁA�㔼�g�́h�^����ꂽ���p���ɏ�������Ă����̂̎p���h���Ǘ����Ă���j�������ƁA�����g�͘r�p���̓����ɂ���ĕω������d�S��l���t�B�[�h�o�b�N���邾���������B
���[�`���O�ł́A�㔼�g�����ł͖ړI���W�ɓ͂��Ȃ������ꍇ�A�����g�ւ̋��͂�v������`�ŋ���������s���܂��B�@������ɐL�������Ȃ瓷�̂͂��Ⴊ��A�����Ȃ����肷��̂ł����A�������ɉE������ɐL�����ꍇ�A���̂͂Ђ˂���������i�D�ɂȂ��āA��������ɉE�������ɂȂ�悤�Ɏp����ύX���Ă����Ƃ�����ł��B
�ł����A����͗��肪���ꂼ�ꎩ�R�ȕ����L�т�P�[�X�͍l�����܂���B�܂���̂Ђ炪�Ȃ��̂ŁA���������ނɂ͗��肪�K�v�ł��̂ŁB
���Q���R����
�֓��͂Ђ��т��̐�B�@�ǂ��ɂ��s�����ɉƂŃv���O�����ɂǂ��Ղ�Z���肽�������������̂����A���˂Ă���̗\�肪�������̂ŏo�����Ă����B
���ł��Ė�ł��Ȃ����A�H�t���ɂ��s���Ă����B�@�����_�O�o���̌y�������ŁA�p�\�R�����莝���̃��o�C���m�[�gVAIO C1XG���o�������邽�߂�LAN�A�_�v�^�[�Ƃ�USB�A�_�v�^�[���v��̂��B�@C1����USB����APC�J�[�h�X���b�g����AIEEE1394��������Ȃ��B�o�b�e���[�����オ��������Ă邵�AEeePC�����ׂ����������Ȃ��`�B
���ǁAC1�p�ɔ������̂�USB�J�[�h�B�@����ɖ���LAN���A�L��LAN�ƁAPS2�ϊ��A�_�v�^�[�����t����\��B
�@
����Ƃ͕ʂ�DVD�h���C�u��������Ă����B�@�䂪�Ƃ�PC�ɂ�DVD���Ă���h���C�u���Ȃ������̂����A���x�K�v�ɂȂ肻���Ȃ̂Ń\�t�g�t���̃h���C�u��5000�~�Ŕ����Ă����B�����Ȃ������B�@5����̃h���C�u�����̂Ńm�[�g�ɂȂ��ɂ͕ϊ��A�_�v�^���K�v�B�@�ӂ�ӂ�Ƃ��܂���Ă�����A980�~���Ă̂������Ă��B�@��������_�����ł��Ă��ƂŔ����Ă����̂����A�A�A�@�S�R�_���B�@USB�|�[�g�ɑ}���ƁA�����d�����}�~������낤�ȁBPC�������܂��B(>_<)�@�����Č��w�h���C�u�͔F�����₪��Ȃ��B�@�g���ˁ[�ȁ[�B���ǂ̓o�b�N�A�b�v�h���C�u�ɂ��Ă����T�C���`�̊O�t���h���C�u�{�b�N�X��DVD�h���C�u�Ɉ��n���܂����B�o�b�N�A�b�v�h���C�u�͍��㗇���ƂȂ�\��B(^_^;)
����Ȃ���ȂŃ����_�̃v���O������G�肾�����̂�23�����炢����B�@�㔼�g�Ɖ����g�̋����R�[�h�͂���ϓ���ł��B�@�܂��́A�@�����g���㔼�g�@�̏��ŏ������āA�㔼�g���牺���g�ւ̎p���ύX�v���͂P�T�C�N���x��Ŏ����悤�ɂ��Ă݂�\��B
���̕������ƁA�����g�ւ̗v�����o���t���[���ŏ㔼�g�̓������P�t���[�������邱�ƂɂȂ�B�@���ꂪ�Ȃ��C�ɓ���Ȃ��B�@������ɂ͉����g�Ə㔼�g�����ꂼ��t���[���ł̎p�����o���A�`�F�b�N���ėv�����o����B�@���ꂩ��܂��t���[���p�����v�Z���Ȃ����āA�Ƃ������ɍ��c���ăt���[�����x���̎p�������߂�K�v�����肻�����B
�ŏI�I�ɂ͍��c���ōs�������ȁB
���Q���T����
�㔼�g�Ɖ����g�̋�������ɂ��ăR�[�f�B���O���Ă݂܂����B
��Ԗ��ƂȂ�A�㔼�g�̖��B���ɑ��鉺���g�̑Ή��́A�u���̃��m���E���v�Ƃ����s���|�C���g�ōl���āA�P���Ƀ`���g�őΉ�����悤�ɂ��Ă����܂����B�@�{���́A���B���̃x�N�g�������āAtilt,pan,roll�@�܂��͍��̍����őΉ����Ȃ���Ȃ�܂���B
�㔼�g�̓������̂́A�����g�ł̃x�N�g���x�[�X�̎p���ڍs�̎��Ɠ����ŁA���̈ړ��ʂ��x�N�g���Ƃ��A���ړ����x���K�肵�ăt���[���p�������߂Ă��܂��B
�r�p�����������āA�r��蒷���w�����o��ƁA�����g�Ƀf�[�^���n��A�`���g�p��ύX���܂��B
�������Ă݂�ƁA�@�܂��A�K�N�K�N���Ăǂ�����������B�e�X�g�ł͖��B���x�N�g���̑傫��������Ɋւ�炸�A0.05radian�̕ύX��������悤�ɂ����̂ł����A��������ƌ����W�̈ړ��ʂ�5�~�����x�ɂȂ�B���̈ړ��ʂ̓t���[��������3�~���ōs���Ă����̂ŁA�`���g��1�x�ύX����ƁA2�t���[�����炢�͘r�̖��B�����������Ȃ����ƂɂȂ�܂��B����ŃK�N�K�N���������ɂȂ��Ă��܂��B
�Ȃ�A�Ƃ������ƂŃ`���g�p�̕ύX�ʂ�0.02radian�ɂ��Ă݂�ƁA�K�N�K�N�͂������������ꂽ���A�̂��̂��Ɠ����B���[��A�C�}�C�`�B
���ƁA�`���g�őΉ�����ƁA���͌Ҋ߂𒆐S�ɉ�]���Ă��܂��A�ڕW�n�_�ւ̋O�����傫�����Ă��܂��B�@��ꂽ���ꂽ�Ƃ��납��ڕW�n�_�������̂ōŏI�I�ɂ͖ڕW�n�_�ɓ��B����̂����A���̋O���������Ɩ������Ă��܂��B�@����͎��̈ړ����x���K�肵�Ă��邱�Ƃɂ�镾�Q�B�@������J1Z������d�S��Ɠ����悤�Ƀ`���g�p�ύX��܂荞��ŁA���̋O���Ƀ��[�v���������������̂�������Ȃ��B�@�����̃v���O�����ł͖��B�����������t���[���ł͘r�̓����͎~�܂�̂ŋO���̂���͂Ȃ����炾�B
���̗��������̖��������͂܂�Ő��܂ꂽ�Ă̏����������オ�������̂悤�ł���B�@�ڕW�̓�������̍����������g�Ƀt�B�[�h�o�b�N���Ă��邱�ƂɂȂ�̂ŁA�t�B�[�h�o�b�N�Q�C�����s�K�Ȃ����Ŕ��U���Ă��܂��Ă���t�B�[�h�o�b�N�n�̂悤�ł�����B�@�L�`���ƍ����ɉ���������o�͂������Ȃ��Ƙb�ɂȂ�Ȃ��悤�ł��ˁ[�B
����������Ƃ�����č��c���ɂ��Ȃ���Ȃ�Ȃ������ł��B���������̓{�[�����E��������A�b�v�ł�����Ďv���Ă��̂ɂȂ��B��������B
���Q���U����
������č��c���̃R�[�h�������Ă݂܂����B
���\�C�����傫���āA�܂Ƃ��ɓ����܂ł�����Ƃ�����J�����B�@�����Ă�̂̓X�P���g�������ŁA���c����ϋɓI�Ɏg�������͂܂��f�o�b�O���B����͑�̈ȉ��̒ʂ�B
�@�����g�̃t���[���f�[�^������āA������㔼�g�ɓn���ăt���[���f�[�^�����B
�A���Ȃ�����̂܂㔼�g�̓t���[�������s�B�������������g�����s�B
�B��肪����ꍇ�̓��g���C�t���O�𗧂ĂāA���B�x�N�g����o�^����B
�C���g���C�t���O���ĉ����g�͖��B�x�N�g�����l�������t���[���f�[�^���č쐬�B
�D�㔼�g�͍č쐬���ꂽ�����g�t���[���f�[�^���g���ď㔼�g�t���[���f�[�^���č쐬�B�@���ꂪ���B��ł��������g���C�͂��Ȃ��B�@�㔼�g�������g�����s����B
���̃v���O���������Ă݂�ƁA�Ȃ����������炩�B�@���s�͕��ʂɂł���̂����A�����オ��ŕG�������Ă��܂��B�@�s�v�c���B
�v���O������������ƕύX���āA���c���R�[�h�������O���Ă݂�ƁA�g���N���߂�B�@�Ȃ�炩�̃o�O�����ꍞ�̂��낤���ǁA�s�v�c�Ȍ��ۂ��ȁ[�B
�E�E�E�E�E�E�E�@���̂�͂Ȃ��Ȃ��ɂ��Č������B
���c�����g�������[�`���O�̃v���O�����͂܂������Ă܂���B�����ɂ��o�O������݂����B
���Q���V����
�Ռ��̎��������o���Ă��܂����B�@ROBO-ONE�@�e�N�j�J���J���t�@�����X�͂Q���P�O���i���j���Ǝv���Ă����̂Ɏ��͂X���i�y�j�������̂��[�B�@������]�I�ł��B�@�y�j���ɂ͂��ꂱ�ꏀ�����悤�Ǝv���Ă����̂ɁA�A�A�A�@�c���ꂽ���Ԃ͍���Ɩ����̖�B�@�F�X������Ɩ������ȁ[�B�@���߂āu�{�[�����E���郉���_�v��A��čs�����������̂����B
���������ɂb�P�Ń����_�������Ƃ���܂łł���A�ו��͍ŏ��ōςނ���F�X�ƃ_���[�W���������낤�Ǝv���āA�Ƃ肠�����͂b�P���d�グ�邱�Ƃɂ����B
�Ƃ��낪�A�����_�R���g���[���[�v���O�������b�P�ɓ]�����邽�߂Ƀ��C���̃m�[�gPC�̋��L�ݒ��ύX�����Ƃ���AVM�E�F�A���Ȃ���Ȃ��Ȃ��Ă��܂����B�@����C1�ǂ��낶��Ȃ��B�@�Ȃ����Ƃ���Ƃ��������G�N�X�v���[�����ł܂��Ă��܂��ăC���C���B�@�܂��Ō��\���������B�@�@���炭�Y���A���L�ݒ�̎��Ɏg�����l�b�g���[�N�E�B�U�[�h������Ƀt�@�C���[�E�H�[����ON�ɂ��Ă��܂��������������̂ɋC�t�����B�@(�[�[;)�@����Ȃ��Ƃ��₪���Ă��`�B
�ŁA�b�P��VC++�̃����^�C��DLL���R�s�[������APS2�R���g���[���[�h���C�o�[���C���X�g�[�������肵�āA�������Ă݂悤�Ƃ���ƁA�A�A�@����H�����_��Telnet�ł��Ȃ��H �܂������Y�݁B�B�@�C�t����LAN�A�_�v�^�[�̃����N�����v�������Ă���B�B
���x�́A�@���Ȃ���������USB2.0��PC�J�[�h��LAN�A�_�v�^��PS2�A�_�v�^���Ȃ����Ƃ���A�����d��������Ȃ���LAN�A�_�v�^�[�������Ă����̂������B�@PC�J�[�h�����������Ă�����Ȃ��B�@�Ԃ���ꂽ���H�Ǝv���������u�[�g�����畜�������B�@�F�X���߂��Ȃ��`�B�@PS2�A�_�v�^��C1�ɂ͂��߂���t���Ă���USB�|�[�g�ɂȂ����ƂŃl�b�g�͊m�ہB�@�����_�R���g���[���v���O�����������������B�@�ӂ��B�@���Ԃ��������ȁ[�B
���c���R�[�h�̃f�o�b�O���ł������ɂȂ��Ȃ��B�@�������Ƀ��O�����͎�肽���ȁB
���ƁARPU-100��AC�A�_�v�^�[�ɂȂ���悤�ɂ����͂��Ă��������ȁB
�����e��̋�C���킩���̂����ǁA�A�낭�ȓ��삪�ł��Ȃ������_�͎����čs�����l�Ȃ����Ȃ��`�@�@����C
���Q���W����
�����͐Ⴞ���Č������A���w���炿����ƕ������A�b�P�͂������߃��[�h�����A�ǂ��������̂��Ǝv���̂����ǁA�d��ON�Ń����_���N���ł��āA�e��ݒ肪�O���t�@�C���ōs����悤�ɂ���Ƃ����A�����_�v���O�����������Ƃ����A�v���Ƃ��Ďd�グ���Ƃ͂Ƃɂ������s�B�@�p������̂������͒��f�ł��B�@���j���ɍĊJ�\��B�@�͂��`�B�B
�o�b�e���[�쓮���Ԃ͂���������Ă���̂ł`�b�A�_�v�^�[�œ����悤�ɁiCPU�Ɠ������j�b�g���炢�͓�������Ǝv���j�����͂������Ǝv���āA�����̍ŏ��̍�Ƃ�AC�A�_�v�^�ƃo�b�e���[�p�������R�l�N�^�̕ϊ��P�[�u���̍쐬�B�@�́A�͂��������̂ɁA���Ȃ����H�t���Ŕ����Ă����R�l�N�^���i�������I�@�������[�[�[�[���ƒT�����̂����ǁA������Ȃ��B�@�̂Ă��܂������Ȃ��B�@(T_T)
����͒��߂āA�e��ݒ�t�@�C�����f�B���N�g���p�X��T���Č�����L�q���A���s�ݒ�̊O���t�@�C��������i�߂܂����B�@�����ꑧ�łb�P�œ�������悤�ɂȂ邩���B
���ƁA�Q���U���ō��c���R�[�h�̃f�o�b�O���ɋN�����g���N�����Ȃ��Ȃ錻�ۂȂ̂����A�@�ǂ����Č����Ȃ��B�@�ǂ����M�_�����N�����Ă������ۂ��B�@���������炩�ɓ��쉹��������̂ł�����Ƃ܂��n�e�i�}�[�N�ł��B�@�Ď����ĂƂ��ł��B�@�G�̔M������Ȃ���Ȃ��B
���܁A2��42���B�@����������Ƃ��������[�B
���Q���X����
���{�����e�N�j�J���J���t�@�����X�ɍs���Ă��܂����B�@����`�A�\�z�ȏ�ɗL�Ӌ`�Ȉ���ł����B�@�e�v���[�������邱�ƂȂ���A�����́uONO�̓d�]�ǐV���v��ONO����ɂ���ł����̂ƁA�A�}�e���X�̂̂ނނ���ɂ���ł����̂����ꂵ�������ł��ˁB�@�d������Ȃ��������ǁA�����_�������Ă��Ă悩�����[�B
�̂ނނ���Ƃ̓��{�b�g�̍���̐i�ߕ��Ȃ����b�ł��܂��āA�y�������Ԃ��������܂����B�@�ΐ삳���h�̃A�j�\���I�[���ɂ͎Q���ł��Ȃ��ȁ[�Ƃ��������������̂ŁA�̂ނނ������w�̕�������U���Ă����ꌬ���Ďv���Ă��̂ł����A�����̓������{�̎d�グ��������Ă��Ƃ������̂ň����������ċA�鎖�ɂ��܂����B
����ɂ��Ă��A�����_�����̂��E���グ����ăf�����Ԃɍ���Ȃ����ď�Ȃ������ł��B�@�̂ނނ���A���x����ɂ͕K���I���Ă��A����ȏ�́A�s�C���̒J��]�������������_���������ł���悤�����܂��I
 �@�A�}�e���X�ƃ��S���[�U�ƋL�O�B�e�B�@�����̃A�}�e���X�Ƀo���b�N��Ԃ̃����_�B�B�@�p�����������B
�@�A�}�e���X�ƃ��S���[�U�ƋL�O�B�e�B�@�����̃A�}�e���X�Ƀo���b�N��Ԃ̃����_�B�B�@�p�����������B
 �@�ڂ�����SD���C�Y�i�[���Q��(^�B^)�B
�@�ڂ�����SD���C�Y�i�[���Q��(^�B^)�B
 �@�L�m�s�[�ƃL�����I�i���j���Q���@(^�B^)�@
�@�L�m�s�[�ƃL�����I�i���j���Q���@(^�B^)�@
 �@���ςς���̃y�[�p�[�L�����I�B�@�����[�ł��B
�@���ςς���̃y�[�p�[�L�����I�B�@�����[�ł��B
���e��ŁA�Έ䂳��Ƀ����_���r�b�O�{�X�Ɍ����Ă݂���ǂ��ł����H���Đi�߂�ꂽ��ł����A�܂��܂��������܂���B�@�܂�5�N�O�̐������{�b�g�N���u�����Ă��Ȃ��ł��B�@�܂��܂��̕������Еt�����猩�����鎞������Ǝv���܂����A���ɂȂ�̂��Ȃ��`�B
�����{�X�̘b���Ă��Ċ������̂́A����ς胍�{�b�g�̓����R���x�[�X�Ői�߂邵���Ȃ���ł��傤���B�����������Ɛ���グ���i�͂Ȃ��̂��ȁH�F�����̘b�ő���̓�����Ęb���o�Ă����̂����ǃZ���T�[���]�X����Ȃ��A�ӂ�`���Ĉӂ���������Ă̂��Ȃ�Ȃ����Ƃ��v���܂������B�@����`�����{�b�g�v���W�F�N�g���Ă̂́A�܂����������l�^���Ǝv�����ǁA����LAN�����K�v���Ęb�ŁA�����R���x�[�X�Ȃ�ł��ˁB�@�G���^���n�͂킩��C�����܂����A�x���n�̃��{�b�g�͎����v�f�������Ƌ����Ȃ��Ɛi���������C�����܂��B�@�����Ƃ��A�A�A�����_��������ڎw���Ă���Ƃ͂����A�܂��u���{�b�g�v�Ƃ������Ȃ��̂��炭�Ȃ̂ʼn��������Ȃ��̂ł����`(>_<)
�@
�{�҂̃v���[���ł́A�Ԗ삳��̃v���[���Ɛ�����̃v���[�������̂��������ɂȂ�܂����B�Ԗ삳��̕��s�����̃Y�������Ęr�̓����ŕ������Ă͖̂ڂ���̊����ł��B�@�����_�ł͍��E�̉�������̎w���l�Ǝ��l�̃Y���i�^�C�~���O�Ƒ��x�̍��j�����āA��Ɏg�����ƍl���Ă��܂������A�Ԗ삳��͂������p����������Ă��ł��ˁB
���ƁA�Ԗ삳��̍������ȊJ���p���͐����ɂ��������Ďv���܂����B�u�����Ȃ����Ċm���ł��Ċ����́A�ŒZ������i��ł銴������ۓI�ł��B�@�Ȃ������Ƃ͑ΏƓI���ȁ[���Ďv���܂����B
�]�|���ɂ��Ă�������́i����A�g����������B�j���łɎ��p�����Ă���悤�ŁA�z���g�Ɏ����͉�����Ă��A�p�������������ł��B�@�������������Ƃ��Q�l�ɂ��Đ��i�������Ǝv���܂��B�@�����ɂł������Ă݂������Ƃ��������ł����̂����ǁA�����Ɖ䖝���č��̎����̂�������Ȃ��Ă���ł��ˁ[�B�@���̂��݁B
���Q���P�O����
��͍���̖�ɂ͂��ŁA�����͒����炢���V�C�B�@�Ⴊ�ς����Ă��ĊO������ɖ��邢�B
�����̗\��ł͍���͈���v���O������������āA���m���E����悤�ɂȂ��������_�������ăe�N�j�J���J���t�@�����X�ɍs�����肾�����̂��B�@�Ȃ̂ō����A�����_�̓��m���E����悤�ɂȂ�͂��Ȃ̂ł��B�B
�@
����A�����_�������Ă������̂����A�d���͓���܂���ł����B�����_�̖���LAN�̓A�h�z�b�N�ڑ����ł��Ȃ��̂ŁAAP���K�v�BAP��AC�œ����̂Ń����_�����ɂ�AC�R���Z���g���K�v�Ȃ̂ł��B�@TAPA����[�Ȃ��`�A�ނ���B�@�����C1XG�̃o�b�e���[�����ĂĖ��[�d�ł�30���Ǝ����Ȃ��B�܁[�����_�̓d�r��10���������Ȃ����炻��͂���ŊԂɍ������肵��(^^�U�@���ۂɂ�30������g�����̂ɂȂ�Ȃ�����PC��AC�R���Z���g���K�v�B�@���܂���C1�̃o�b�e���[�����Ȃ����B
������J���r���̃��{�b�g�Ƃ͂����A�Ƃ��玝���o�����̂ɁA�������̂ɂ���₱��₪�K�v�Ȃ̂̓i���Z���X�Ȃ̂ŁAAC�Ȃ��œ�������悤�ɂ��˂Ȃ��Ȃ��Ǝv���܂����B�@�J�����̃��j�^�[�Ƃ����K�v�ȃP�[�X������̂�PC��AP�Ȃ��łȂ���������ǁA�A�A�@���Ă��ƂŁA�ŋ߂̖���LAN�N���C�A���g�́A�\�t�g�E�F�AAP���Ă̂��ł������Ȃ̂ł�����Ǝ����Ă݂��B����œ������Ȃ�����������������AP�͕s�v�ɂȂ�Ȃ��B�B�@(^_^;)
���ʂ́~�B�@�L��LAN�Ƀu���b�W�����PING�͒ʂ�̂����ǁATELNET��FTP���Ȃ���Ȃ��B�ǂ����Ńu���b�L���O����Ă�̂��H�@�L��LAN���v����Ă̂͘_�O�Ȃ̂łƂ肠�����\�t�g�E�F�AAP�̈Ă̓{�c���ۂ��B�@AP��AC�A�_�v�^���TV������o�b�e���[�łTV����ċ������邩�Ȃ��`�B
���Ƃ̓����R������Ȃ��āA�R�~���j�P�[�^�Ƃ���PS2�R���g���[��������ڂȂ���悤�ɂ���āB�@�J�����̃��j�^�[�͂ł��Ȃ����ǁAPC�����œ�������B�@�݂�Ȃ̃��{�b�g�̓R���g���[����PS2�̐M��������悤�ɂȂ��Ă���Ă��ƂȂ̂��ȁH�V���A���ɕϊ�������ۂ��{�[�h�������Ă�����1���~������_(��o��)�^�I�@�\�Z5000�~���炢�ōl���Ă����ǁA5000�~����A�R���g���[�����������Ȃ��Ȃ��B�����ŃC���v������̂��Ď��Ԃ��ܑ̖������Ȃ��B�@�ӂށB�B�@�R���g���[�����݂�1���~���炢�ŃV���A���Ŏ����@���Ė����ł��傤���H�@�N�������Ă��������`(>_<)
�@
���c���̃R�[�h�͂ǂ���炤�܂������Ă���炵���B�@�s�ӂɕG�̃g���N���������Ȃ邪�A���̂Ƃ���M�_���炵���A���炭�x�܂���Ή���B�@���̂��ł͂Ȃ��A���������C�����ė����オ��ƕG�ɕ��S��������Ȃ��Ȃ�̂ł��̕ӂ��g�ݍ���ł����������B�@2��ڎw���Ă���̂ɂ��̕ӂ�͂����s�N��w�̃����_�ł�(�[�[;)
���c���R�[�h�������o�����̂ɘr�̃��[�`���O�̕����͂��܂��s���Ȃ������̂ł����A�����\�[�X�߂Ă�����~�X���B�@���[�`���O���삵�����悤�ɂȂ�܂����B
�肪�͂��Ȃ��Ƃ����\�����������g�͂��̓͂��Ȃ����Ղ�ɉ����ē��̂̎p�������̂����A�Ƃ肠�����̃R�[�h�ł͂Ƃɂ���������Ƃ����V������悤�ɂ��Ă���B�@������Ƃ����V�����������g�p��������čēx�r��L���Ƃ���������J��Ԃ����ƂōŏI�I�ɖړI�̍��W�ɓ��B������Ă����X���|�[���B
�܂��A�P���ɏ�L�̃��[���œ������ƁA
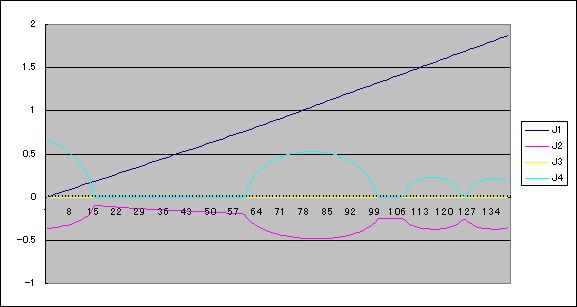
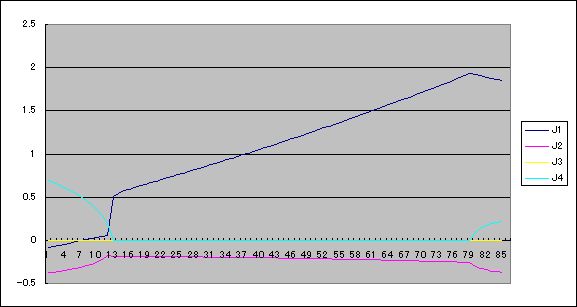
J1�͌��̊߂ŁA�����ɘr���グ�čs���Ă���B�O���t�ɂ͖������A�����ɍ����Ȃ����čs���Ă���̂��B�@�r���ۂ����肵�Ă���Ƃ���͓��̂̓����Ȃ��Ă��r��������G���A�炵���B�@���̃��[�����ƁA���̃��[�g�͉��̐}�̍����j���̂悤�ɂȂ�B�@���ꂾ�ƂȂ����������̂ł�͂�A�Ԃ��j���Ŏ������[�g�ňړ����������Ƃ���B
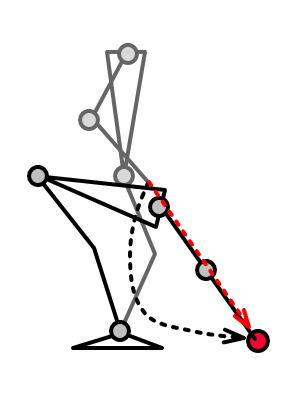
�ŁA���x�͓��̎p�����ύX�ɂȂ����ꍇ�́A�ύX�ɂȂ�O�ɖڕW�Ƃ��Đݒ肵�Ă������W��ێ����Ă����A���̍��W�ֈړ����邱�Ƃʂ̖ڕW�Ƃ��Ĉړ�����悤�ɂ��Ă݂��B�@���̂Ƃ��̊e�߂̓��������ꁫ
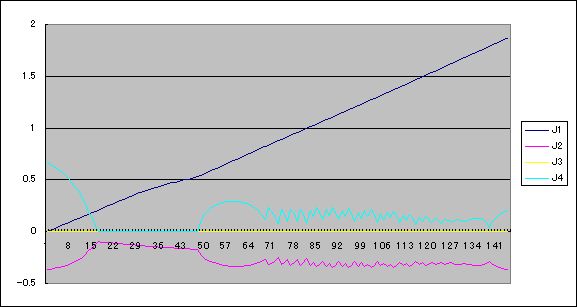
�����������Ăǂ����悤���Ȃ��B
���̂������o������A���߈ȊO�͓������Ȃ��ŋO�����������킹��悤�ɂ������Ƃ��낾���A���̌v�Z�����\�ʓ|�Ȍv�Z�ƂȂ�B�@�r�̍Œ������͔����Ă���̂Ō��߂���r�̍Œ������̋��ʂ��`����B�@����Ǝ��O���̒����̕������̌�_�����߂�悢�킯���B���������Ƃ����c���Ƃ���������Ɋv�Z����̂͂₾�Ȃ��Ǝv�������A�d���Ȃ��B�@�ƌv�Z���������̂����A���ꂪ�O���������ɂȂ��ĂČ��\�Ȏ菇�B�@���߂����_�Ƃ�����W�n�ɕϊ�������A�O�������������Ƌ��̌��_��ʂ镽�ʂɃX���C�X���čl����A�A�Ƃ�������ƍl�������A����͍l����Ƃ��낶��˂��Ȃ��`�Ǝv���Ă�߂܂����B
���ǁA���̎p�����ύX�ɂȂ����ꍇ�́A�͂��Ȃ��̂����m�ŖڕW�ƂȂ���W�Ɏ��L���B����ƁA�e�ɂ��p�ɂ��r��ڕW�Ɍ����ĐL���̂��B���W�̊Ǘ��l�͂��������Ȃ��Ă��܂��̂ŁA�ߊp�x������̍��W���č\�z����B�@��������ē��������ꍇ�̊e�߂̓��������ꁫ
�܂��A��̐Ԃ��O����`���悤�ɂȂ����B������ƐԂ��O���̉���ʂ銴���ɂȂ�͂��B
�ꉞ����炵���������ł����̂Ńs�b�N�A�b�v�̐^����������Ă݂܂����B�@��ԍ��W���w������ƁA�r�̓����ɓ��̎p�����ǐ����Ă����܂��B�@�p��������邱�Ƃŏd�S�̃o�����X������Ă����̂����ǁA���A���^�C���ɏd�S���W���v�Z���ĕ���Ă����Ă܂��B�@���ƁA�����Ȃ��Ă����ƃ��[����������肪�������Ċ߂��ꕔ�s����ɂȂ�̂�J1Z������K�X�K�p���Ă��܂��B�����͂�����ƈڍs���������̂����ǁA���܂̂Ƃ���ł��Ă܂���B�@�������J�����ŖڕW��߂炦�Ă�킯����Ȃ��āA���߂����̍��W�ɑΏە���u���Ă邾���ł��B���ɍs���A���ށA�����グ��@�Ƃ��������PC����R�}���h�𑗂��Ď��{���Ă܂��B�����ł͂���܂���B
�r�������L������Ɠ������V���N���b�ƂȂ��Ă��܂�悭�Ȃ��ł��B�ő�ɂ܂Řr��L���O�ɓ��̑��փw���v���o���悤�ɂ��������悳�����B
�l���Ă������A�s�b�N�A�b�v���삪�o����͈͂������B�@���W���w�����Ă����֎��L�����Ă����قǂ̎��R�x���o���������Ȃ��̂��Y�݂ǂ���B�������ȁ[�B
���Q���P�P����
�Ƃ��Ƃ�����ׂ��������Ă��܂��܂����B�@�����_�̂܂Ԃ����オ��Ȃ��Ȃ��Ă��܂����B(>_<)�@�ǂ�����ƁA�܂Ԃ����グ�������郊���N�����Ă��܂��Ă���B�@0.5�~�����̃v���o���ō�������̂�����A�܂��d���Ȃ��B���܂ŗǂ����������̂��B
���Ȃ̂́A�畔���A���ɂ܂Ԃ�����͑g�ݗ��Ă����낵������̂��B�U�X��J���đg�ݗ��Ď菇���m�������B�B�@�̂����ǁA�Y��Ă��܂����B(^^�U�@�������Ȃ�����Ȃ�Ȃ��Ȃ����獢��Ȃ��Ǝv���Ă��̂����A�Ƃ��Ƃ����̓������Ă��܂����B
 �@���c�ɕ������ꂽ����
�@���c�ɕ������ꂽ����
�ā[�̂͑傰���ŁA���炭���߂Ă���Ȃ�ƂȂ��v���o���Ă����̂ŁA�Ȃ�Ƃ��Ȃ�܂����B�@���x��1.0�~���̃v���o���ō�����̂ŁA������������������ł��傤�B�B�@���āA����H����������������ƖY��ďC���ł��Ȃ��Ȃ����肵�āB�@(^_^;)
�ȑO�ɑg�ݗ��Ă��Ƃ��̓l�W�̂��ݎ~�ߍނ������ĂȂ��Ė؍H�{���h�ł��ݎ~�߂ɂ����̂ł����B�@����̓��b�N�^�C�g��h���Ă������̂����ǁA���������Ď��s���������ȁ[�A�؍H�{���h�͑S�R�ɂ܂Ȃ���ɁA�͂������̓p�������Y��ɂ͂���܂��B�@�؍H�{���h�ŏ\�������������B
�@
���[�`���O���ł����̂ŁA�����オ�胂�[�V�����̐����ɖ߂�Ȃ���B�@�����d�g�݂��g���āA�����W�̌Œ�����邽�߂ɓ��̂������Ă̂����˂Ȃ�Ȃ��B�@�ł��A���̓��[�`���O�Ńs�b�N�A�b�v���鎞�ɁA���̂̓������r���ۂ������Ŏ��X�]��ł��܂��̂��B����A�W���C���ŕ���Ă�肽���Ȃ��B
���̍ہA������ƃW���C����ɂ��Đ������Ȃ��Ƃ����Ȃ��B�@���͂��܁A���s�ɂ̓W���C��������Ă܂���B�ǂ����|���U�q�O���ł̕��s���ƃW���C���ŕ����Ȃ���Ȃ����ȁ[���ċC�����Ă�̂ƁA����Ă��C�}�C�`�Ȋ����������̂ŁB
�������łɃJ���t�@�����X�ŕ��������@�����Ă݂悤���ȁ[�B�i�܂���蓹�@(^_^;)�@�j
���Q���P�Q����
�W���C����������ă��[�`���O����̍Œ��ɂ��W���C�������������悤�ɂ��܂����B�@���A���܂����B���[�`���O���삪���肷��悤�ɂȂ������ǂ������e�X�g����̂�Y��Ă��I�@�_(��o��)�^�I
����̃e�N�j�J�����t�@�����X�ɎQ�����āA�Î~���Ă���Ƃ��̃W���C���t�B�[�h�o�b�N�ɂ��Ă��A�����������ǂ��������������Ƃ��킩��܂����B�@���܁A�~�܂��Ă��鎞�ɊO�͂������Ƃ���Ȃ�ɐ�����������A�W���C���̌��ʂ������Ă��܂��B�@���A����͍��̃t�B�[�h�o�b�N�̂����������h��̗h��Ԃ��i�X���āA�߂��Ă����Ƃ��j�^�C�~���O�Łu�Ȃ炢����v�ɂȂ��Ă��邩��ŁA�h��̍s���̃t�F�[�Y�ł́A�h��ɋt�炤�悤�ɓ��삵�Ă���悤�ł��B�@�h��Ԃ��ł̃v���Z�X�ł͂Ȃ炢����̌��ʂŐ������������Ă��܂��A�h��̍s���̃v���Z�X�ɂ����Ă�����������������悤�ȓ����������K�v������܂��B
���쒆�i���s���j�̃W���C���t�B�[�h�o�b�N�ɂ��ẮA����̑O��߂ɑ��āA�W���C���̒l�ɉ����ăR���v���C�A���X�X���[�v�ݒ肾�����s���悤�ɂ��Ă݂܂����B�@����͂Ȃ炢����Ǝp���̂��߂̃g���N�����̗����̖����������̂ł��B�@���U�̖ړI�����Ȃ炱��ł����ʂ͂���͂��B�@���E�̊߂ɂ��Ă͏����ݒ�łȂ炢���s�킹�邽�߂ɂ����Ƃ��_�炩�����Ă��܂��̂ŁA�t�B�[�h�o�b�N�͂����܂���B�@���܂ł�肱���ɂ����Ȃ������ǂ����͔��������ǁA����͏������炩�ɂȂ����C�����Ȃ��ł��Ȃ��ł��B���炭�l�q���ŁB
���܂͂����܂ŁB
���Ƃ͕��ꂽ�p�������铮��i�������A�J�ڎ��Ԃ��A�j���ǂ̂悤�ɂ��邩���l���Ă����B
�@
�}�ɑ��������o�O������������Ă����C���B�@��������͂܂��S�g��������̑����ɖ߂낤�B
���Q���P�R�����i�A�b�v�����̂͂P�S���ł��j

�����_�̃J�����͒��L�p������Y���g���Ă܂��B�@�J�������W���[���ɂ̓Y�[���̋@�\�������āA�Y�[������Ƌ���摜�̒���������S��ʂɊg�傷�邱�Ƃ��ł��܂��B�ɉ����Đ�ւ��Ďg�����Ƃ��ł��܂��B�@���܂܂ł͊ȒP�ȃX�C�b�`�����t���ă}�j���A���Ő�ւ��Ă��܂����B�@�ł��A���̐�ւ���CPU����ł���悤�ɂ������Ȃ��Ǝv���Ă���܂����B
�ŁA��̉摜�����̃C���^�[�t�F�[�X�{�[�h�B
�����_�̃W���C���{�����x�Z���T�[�{�[�h�̓}�C�R��������Ă��āA����ɂ�6�_��LED�̐��䂪�ł��܂��B�@RPU-100�̒ʐM��RS485�ł��B
�J�����̃R���g���[�������̃}�C�R���{�[�h��LED�|�[�g�����蓖�ĂĂ�点�悤�Ƃ����̂ł����A�_�C�i�~�b�N�h���C�u�����Ă���̂őS�_���i�����Ƃ����邭�_���j�ł��A�p���X�M�����o�Ă��܂��B�@�J�����̃Y�[����ւ��̓��x���Ȃ̂ŁA���̂܂܂ł͎g���Ȃ��B�@�Ƃ����킯�ʼn摜�̃C���^�[�t�F�[�X�{�[�h���K�v�ɂȂ�܂��B�@�P�Ƀ��m�}���`�����ăp���X�M�������x���M���ɂ��Ă邾���Ȃ�ł����ǂˁB
���̊ȒP�ȃ{�[�h�����̂��߂�ǂ������Ă߂�ǂ������Č�ɂ��Ă�����ł����A�Ƃ��Ƃ���O���N���č�邱�Ƃɂ��܂����B�@�ł��A����ς�߂�ǂ������̂ŋx�x�݂̍�Ƃł��āA���������̂͐[��̂R���B(�[�[;)�@�������Ă悩�����[�B
���̓Z���T�[�{�[�h��V�������悤�Ǝv���Ă���̂ł������������̂͂��̐V�Z���T�[�{�[�h�ɑg�ݍ��ޗ\��Ȃ̂ŒZ�������ƂȂ�\��ł��B�@�E�E�E����H��������(^^�U
���Q���P�S����
 �@�@�@
�@�@�@
�P�Q���Ɏ����Y�ꂽ�W���C���t�B�[�h�o�b�N�������Ȃ���̃s�b�N�A�b�v����B�@�ǂ����ȁ[�[�[�H�@�r�N���Ɠ����������ł���炵�Ă��܂�����ɃW���C�����������Ă�����ƃK�N�u������B�@�����ɂ����Ȃ������͔����B
�`���R�̕�݂��s�b�N�A�b�v��������g�g�����d���������A������50%���ĂƂ��B���ꂭ�炢�̏d���i50�O�������炢�H�j�ɂȂ���������d�ʂ�z�����Ȃ���Ȃ�Ȃ��炵���B
�@
������Ȃɂ��ARS485����̒��q�������B�@���܁A�����O�p�P�b�g�i�����̃T�[�{�ɓ����w�߂��o���R�}���h�j��20�T�[�{�܂łɌ��肵�đ����Ă���̂����A10�T�[�{���炢�����E�ɂȂ�ꍇ������B�d���̓���Ȃ����Œ���̂����A���悭�킩��Ȃ��B�@�P�[�u�����ꂩ���Ă���̂��A�R�l�N�^�����������ՂŐڐG�s�ǂ��N���������Ă���̂��B�ȑO�͂���Ȃ��Ƃ͖����������牽�������������ƍl������̂����A����̂͂��ꂭ�炢���B�B�@�Ȃ�ƂȂ��A���������Ȃ��Ă���̂�RPU-100�̃f�o�C�X�̂悤�ȋC������̂����A�����Ȃ�Ƃ���グ���Ȃ��B
�E�E�E����A20�T�[�{�̓����������肾�����͔̂�r�I�ŋ߂��B�B�@�O���炠�����Ǐ�Ȃ̂�������Ȃ��ȁB
ROBO���y�ɂē������{�̑S�g���C�����邱�Ƃ��ł��܂����B�@������ł��B�@�g���C����l�͖{���Ƀ`�������W���[�Ȑl�����ł��B�@�S�R���Z�͂Ȃ��̂�����ǁA���Ă���ƒ��킵�����Ȃ����Ⴂ�܂��B�@���A�䖝���Ȃ��ƃ����_���Q�ɂȂ�܂���B�@���܂܂�B�@
���Q���P�U����
�s�b�N�A�b�v���ł���悤�ɂȂ������A�J�����Ń��m�ɋ߂Â��Ď����グ����Ă�����������������̂����A�]�|��g�Ɨ����オ�蓮��������Ǝd�グ�Ȃ��ƁA������x�Ɏ܂�Ă��܂����˂Ȃ��B�@�Ƃ����킯�ŁA�o���̈�������������̗����オ�胂�[�V�����̍�蒼��������Ă����B
�r��IK���͂�͂�ǂ������܂��s���Ȃ��B���̃��[���p�����w�肷��Ǝv���ʂ�ɍĐ����Ȃ��X��������B�@�ǂ����Ă����̃��[�����g�����r�p�����g�����������̂ŁA�ߊp�x�Ŏw���ł���悤�ɂ��Ă��܂����B�@�����I�ɂ͊ߊp�x�Ŏw��������Ă̂͋֎~�Ȃ��ǁA�@�������Ⴆ���[�V�����Đ����֎~�Z�Ȃ̂ł��̍ۋ����悤�B�A�v���D�悾�B
��ŁA�K�V���K�V������Ă���A���x�͂܂Ԃ�������Ă��܂����B(>_<)�@���Ȃ�������Ђъ��ꂵ�Ă����玞�Ԃ̖�肾�������ǂˁB
 �@�E�C���N�ł���悤�ɂȂ�܂����B(�[�[;)
�@�E�C���N�ł���悤�ɂȂ�܂����B(�[�[;)
�o�L���[�����č�蒼���Ȃ���B�B�@�ŋ߁A�����_�̏C�����������Ă�Ȃ��`�B
���[�V�����Đ��Ƃ����Ă��A�����ɂȂ������Ƃ͏d�S������Ȃ��痧���オ���悤�ɂ������B�@�Q�]�����Ă��Ԃł͏d�S��͐��Ă�̂ŁA�r������d�S������邱�ƂɂȂ�B�@���ꂪ���\�ʓ|�ŁA��ʂ��v�Z���āA��ʂ�܂荞�p���Ɉڍs���Ă������J�n���Ȃ��ƁA�K�N���Ɠ����Ă��܂��Ȃ��B�@�R�[�f�B���O�͂ł������ǁA�f�o�b�O�͖������Ȃ��`�B
���������l���Ă��邤���ɋC�t�����̂����A�㔼�g�̓��샂�[�h�܂��܂��F�X�ȃ��[�h���K�v�Ȃ悤���B�@���͇@���̊�i�܂�A�����g�p�����ς���Ă��r�͓����Ȃ��j�@�A��ԍ��W���[�h�i�����g�������Ă��A���̍��W��ۑ�����悤�ɘr�������j�@�Ƃ�����̃��[�h�������Ă���̂����A�B�Ƃ��āA�r�p���̕ۑ����[�h���~�����B�@����͉����g��A���̂̎p�����ς���Ă���Ԃɂ�����r�̎p�����ۑ������悤�Ɍ^�߂����Ƃ������[�h���B�@�l������Q�������Ɉڍs����Ƃ��̘r�̐U�镑�������߂�̂��ʓ|�Ȃ̂ŁA���̃��[�h�Ŏ����I�ɓK���Ȏp���ɂȂ�悤�ɂ������B
�܂Ԃ�����ꂽ���Ƃ����A�܂��O�������ĊJ�B�@���Ȃ����A1�~���̃v���Ō^�������Ȃ��Ď��s�����B�@���^�����������͖،^�̕\�ʂ��d�オ���Ă��Ȃ����ƂƁA�������z�����Ȃ����ƁB�@�����A�������z��傫������̂͂��₾���A�،^�̎d�グ�����E�B�@�\�ʑS�����p�e�Ŏd�グ��悭�Ȃ邩������Ȃ����ǎ�Ԃ��Ȃ����`�B(>_<)�@�Ȃ̂ŁA�،^���^�ɂ��Ĕ��������Ȃ����ƍl���Ă����A���ꂾ�Ɩ،^��S�ʍ�蒼���Ȃ���Ȃ�Ȃ��B
�ŁA�l�����̂��A0.5mm�v���Őϑw������ăA�C�f�B�A�i�A�C�f�B�A�Ȃ̂��ȁH�j�@0.5�~���Ȃ�ア���睚�܂��Ė،^�����Ƃ͂ł���B�ŁA��x�����Ղ����Ă����Ă���X�ɂ���1�w�d�˂�̂��B1�w�ڂ�2�w�ڂ͗Z�����Ă��܂���������Ȃ����ǁA�Z�������炵���ł��̕����D�s���B
�ŁA����Ă݂�ƁA�Z���Ȃ��Ȃ��B�@�S�R�B�@�l����Ⴛ��ȔM�ʂ����ĂȂ�����ˁB�@�ϑw����1�w�ڂ�2�w�ڂ̓X�����Ɣ����܂��B�@�܂��d�オ��͏\���ł͂Ȃ�����ǁA�Ȃ�Ƃ��g����A�^�}�̊O�����ł��܂����B�@�܂��ڂ��J���ĂȂ��̂Ŏ��t�����Ȃ����ǁA�A�A����͖������ȁB

0.5�~���Ŗ،^���R�[�e�B���O�����1�~���v���Ńo�L���[�����Ă��X�����Ɣ��������B�@�ϑw�̌��p�͂��̑��ɂ��A1�w�ڂ̃o�L���[�����ɔ����Ȃ��Ă��܂���������2�w�ڂŌ�������Ƃ����|�����o���Ȃ��͂Ȃ��B��ʃJ�o�[��1�w�ڂ�2�w�ڂŌ^��180�x��]�����Č��݂̒��������Ă݂��B�@������ƃV���ɂȂ�����A���ꂽ��������̂����A2�w���邩���C�����₷���B�@����ő��̕��ʂ̊O������ꂻ�����[�B(^�E^)
���Q���P�V����
�����͎�ɊO���A���X���[�V�����B
�O���͓��̖̂،^�쐬�Ə�r�̐��^�B�@��ʊO���Ɋ��|���J���悤�Ǝv���Ă����ǁA�C�����Ƃ��̎��Ԃ͂Ȃ������B�@���A�܂Ԃ��̐��^���B
���̖̂،^�͂��������ŏo���Ă������ǁA�o�L���[���ň����Ȃ������Ȋ����B�@�j��Ȃ���R�w���炢�ɂ���Ȃ�Ƃ��Ȃ邩�ȁ[�H�H
���[�V�����́A��͂�d�S��ւ̐�ւ��œ�q���B�@�܂��A�r�̓��샂�[�h�̒lj��Ɏ�Ԏ���āA��Ԏ�������ǂł��܂����B�@���̃��[�h�i�r�p���ۑ����[�h�j�͍���Ă݂āA���̓����i���̂������Ă��n�ʂɑ���r�̎p�����ς��Ȃ��j�͂Ȃ�قǕK�v�������ȁA���Ďv�������ǁA���ۂɃ��[�V�����ɑg�ݍ���ł݂�ƁA���̂Ɗ����Ă��܂��P�[�X�����Ȃ������B�@�����ށB���ۂɂ͘r�p����ۑ������Ȃ��āA�قڕۑ����đ��Ɗ����Ȃ����Ă̂��K�v�������̂��B�@���`�F�b�N�����Ȃ���Ȃ��B
�d�S��ւ̐�ւ��œ��샂�[�h��ύX����ƁA�ُ�ȓ������n�߂Ă��܂��B�@�܂��܂��o�M�[���ȁB
���̏T���A�O���֘A�͐i���ǁA����v���O�����͐i�����C�}�C�`�ł����B�@����ڂ�B�B
���Q���P�W����
���������O���ƃ��[�V�����B�@�@�ǂ�����Ȃ�Ƃ��������������Ȃ��B
����A��r�̊O��������Ă����̂����A���̑����B�Ȃ��Ȃ������Ȃ̂����A����ƃo�L���[����������Ȃ��čs���Ă�悤�Ȋ����B�@�p���`���O���^���̂���݂��傫���Ȃ��ċ�C�R����N�����������̂��H�@�Ō�̓M���M���A�E�g���Ċ����̎d�オ�肾�������A�߂�ǂ������Ȃ��Ă܂��������[�Ƃ����m���ɂȂ��Ă��܂����B(>_<)�@�܂��������B
�l���Ă��Ă��n�܂�Ȃ��̂œ��̕��̃o�L���[��������Ă݂͂����A������s�B�ł��߂��܂����B
 �@���s�������^�����\��t���Ă܂��B�����ĂԂ�Ԃ�B
�@���s�������^�����\��t���Ă܂��B�����ĂԂ�Ԃ�B
�����ɂԂ������čă`�������W���ȁ[�B
�Ō�͂܂Ԃ��̐��^��������̂����A�،^���͂������ɂ�����B�@�����ɂ��Ă��܂����B�@�ǂ����v���̒g�ߋ�������ł��B�g���g���ɂ���Ɣ����Ȃ��Ă��܂����A���Ƃ����ĉ���������ƐL�тȂ��̂Ő��^�Ɏ��s����B�@����Ȃ��B�B
���[�V�����̕��͂������ȏɂȂ��Ă���B�@RS485�̕s��Ȃ̂��A�R�}���h���t������t���Ȃ�������B�@���ԂƋ��ɃR�}���h��t�����������Ă�C������B�@���̊����̂ɔM�\���Ƃ��Ȃ���Ȃ��`�H�H�H�@����ȂȂ��A����������̗����オ��͂ЂƂƂ��芮���B�Q�������ɂȂ��Ă���d�S����J�n���āA�L�`���Ɨ����オ��Ƃ����̂͏o�������ۂ��̂����A���܂Ɏ��s����B�@�ǂ������肵�Ȃ��B�@�ǂ��������̂��B�B�@�O���ɂ��Ă����[�V�����ɂ��Ă��Ȃɂ��L�����Ƃ��Ȃ�������⊴���Y���Ă���B
���Q���P�X����
RS485�������������ɂ��āA�@�@����ǂ����Ă������Ȃ��������[�V�����������͖��Ȃ������B��͂蒷���Ԏg���Ă���Ɖ��������������Ȃ�Ƃ������Ƃ͊m���̂悤���B�M�\���Ȃ̂��A�o�O�Ȃ̂��B�@���߂Ȏ��̓����O�p�P�b�g�𑗂����T�[�{�S�Ă��R�}���h���t���Ȃ����A�R�}���h������Z������Ǝt�����肷�錻�ۂ���l����ƃN���b�N������Ă��܂��Ă���̂ł͂Ȃ����ȁ[�ƁB�B�@����Ɖ��x�����̈����R���f���T��������������̂��Ȃ��Ƃ��B�@FPGA�̖\���i���Ă̂�����̂��ǂ����m��Ȃ����j�Ƃ��ł͖��������B�@�����`��B�B�@RPU-100�����̂Ƀ_���ł��B�@���F�͎����V�X�e�����炢�ɂ����g���Ȃ��̂��ȁB�@�����̂ɁB�B
�@
���s���ꉞ�ł��āi��ނ͂قƂ�ǂł��Ȃ����ǁj�A�@�N���オ����o���āA�@�J�����Ńg���b�L���O���邱�Ƃ��ł��āA�@���m���E���グ�邱�Ƃ��ꉞ�ł���悤�ɂȂ����B�@���A���Ɠ]�|�̎�g���ł���B�@�ǂ̗v�f���܂��\���ł͂Ȃ��̂����ǁA�������邽�߂̊O�x�̍ޗ��͑������悤���B�@�s���Ǘ��ƍs�����肪�ł���Ύ����ł�����Ă��Ƃ��B
�s���Ǘ��Ƃ́A�@���܂ł͗v�f�J���������̂ŁA�����̎��s�R�}���h���l�b�g�o�R�ő����ă��{�b�g�Ɏ��s�����Ă����̂����A���{�b�g���g�����߂��o���čs�������邽�߂̊Ǘ����B�l�Ԃ��������Ă���Ƃ��͓��삪�I���̂�҂�����A�Ԃ�u������A�Ƃ��������Ƃ͑���ҔC���������̂����{�b�g���Ǘ�����Ƃ������ƁB
�ȑO�ɃA�C�{�ło�j��������v���O��������������́A�X�N���v�g������ǂ���������̂����A�ǂ����悤���ȁB�@�Ƃ肠�������{�r�����[�h����点��ɂ̓A�C�{�ł�����̂Ɠ����悤�ȓ��샋�[�����Đ�����悤�Ȏd�g�݂����Ώo�������B�@�ł��A��肽�������͂��������̂Ƃ��܂��Ⴄ�̂ł����Ƃ����Ɲ��݂��ޕK�v������B
���A���m���E���グ����Ă̂͂܂��o���ĂȂ����B�@�J�����ő��������̂��E���グ�Ȃ���o�������Č����Ȃ��ł��ˁB
���Q���Q�O����
�����͎v������葁���A�ꂽ�̂ɁA�ǂ��ɂ��X�C�b�`�����炸�ɂ��炾��ƁB�B�B
���ꂶ��C�J���ƁA���[�V�����Đ����[�`���̃T�[�{�ւ̃R�}���h���������̉��ǂȂ�����Ă܂����B
���[�V�����Đ��ł͊�{�I�Ɋp�x�x�[�X�œ������Ă܂��āA�p���x�[�X�ɂ���̂͗����オ���ăo�����X���Ƃ�ӂ肩��ł��B�@�ŁARS601CR�͂P�R�}���h�Ŏw�����ԂŖړI�p�x�ɂȂ�Ƃ�������y�Ȏw�����o����̂ŁA������g���Ă܂����B
���̂���y�R�}���h�̖��́A�T�[�{����M���~�X��ƁA���̃R�}���h�̓��W�F�N�g����āA����ɂ��̂��Ƃ�CPU���ł͊��m�ł��Ȃ��Ƃ������Ƃł��B�@���A�A�N�m���b�W���o����̂Ŏ�M�ʒB����邱�Ƃ��ł��܂����A�����O�p�P�b�g�ň�ĒʒB�������ꍇ�̓A�N�m���b�W�͎�邱�Ƃ��ł��܂���B
�Ȃ̂ŁA����̖��̂悤�ɃR�}���h���T�[�{�ɓ͂��Ȃ��Ȃ�ƁA�r�[�ɂɂ��������������s���Ȃ��Ȃ�B
G-ROBOTS��RS301CR�������R�}���h�̌n�Ȃ��ǁA�������CPU���W���[������5ms���̎������p�x�R�}���h���o���Ă��邻���ł��B�@�Ƃ������ƂŁARS485�̒ʐM�s�S���N���邩������Ȃ��̂ŁA���ԕt���p�x���߂͊�{�I�ɂ͕���B�������p�x���߂��o�������鎖�ɂ��܂����B
�㔼�g�Ɖ����g�̋����Ȃ��l����Ƃ����������p�x���߂���Ȃ���F�X�ƕs�s��������̂ł�����ɓ��ꂵ�����������ł��傤�B�@���ԕt���̊p�x���߂ŃT�[�{�����ƂƂĂ��X���[�Y�ɓ����̂Ō��ĂċC����������ł����ǂˁ[�B
���Q���Q�Q����
�����͊֓��g���{�b�g���K��B�@�ł��A�����͌��Ȃł��B�@�Ȃ��Ȃ�A�������_�͂Ƃ��Ă��Ƃ����炩���Ă��Ԃł��ĂȂ�Ƃ�����������Ԃ�����ł��B
���[�V�����쐬�̐܂�ɉ�ꂽ�܂Ԃ��������ĂȂ��B��̓l�W�q���[�Y���Ƃ܂܂Ńu���u���̂܂܁B�@���[�V�����͂ł������ǁA�]�|��g�����肹���A��������r�[�Ɏ܂�Ă��܂��B�@�X�ɂ͖�����ڕW�ɍ���Ă����O�����Ԃɍ��킸�B�B�B�B�B�@���������킯�ŁA�����͂�����ĊO�������܂��B�@����̗��K��ɂ͊O�����ē��������_�������čs������ł��B�@�O���͂��Ă����A���삳����v���O�����͂����ꑧ�A���`���ꑧ���Ċ����Ȃ��ǂȂ��`�B�@�v���O��������Ă�����Ă��܂����I���Ȃ������ł��B
 �@�����O���B�@���|���J���āA���Ƃ͓h�����邾���B
�@�����O���B�@���|���J���āA���Ƃ͓h�����邾���B
 �@���r��r���̊O���B�@�E�r�p�͂܂�������Ȃ��Ƃ����Ȃ��B
�@���r��r���̊O���B�@�E�r�p�͂܂�������Ȃ��Ƃ����Ȃ��B
 �@�ł������������ɕ��������������̖،^�B�Z���^�[����葹�˂Ăނ���ւ���(�[�[;)�@�X�ɂ͂���ł��܂��傫�߂���Ǝv���B�@
�@�ł������������ɕ��������������̖،^�B�Z���^�[����葹�˂Ăނ���ւ���(�[�[;)�@�X�ɂ͂���ł��܂��傫�߂���Ǝv���B�@
���r���́A�}�j�s�����[�^������Ă���ɂ��悤���ȂƂ��A�@�G�����̊O���̃C���[�W�������ς�킩�Ȃ��Ƃ��A�w���͂܂�������_���Ƃ��B�@�܂��܂��܂��܂��ł��B
�������̊O�����Ă�������ꔭ�ʼn�ꂿ�Ⴄ�悤�ȁB�B�@�����ɃE���^���t�H�[���ł��l�߂Ă��������ȁB(^_^;)
���Q���Q�R����
���K��ւ͍s�����ɁA�����炸�[�[�[�[���ƊO�����B
�����̃J�o�[���Ȃ�Ƃ����^�ł��܂����B�@�܂Ԃ������ڂƂ��V���B�@�������_�ł��B�@�����ƁAPLEN�Ɏ��ĂȂ����Ȃ��ȁB���͔��������炩�H
��r�ɃJ�o�[������Ƙr�̒����ɑ��ĕI�̈ʒu���s�ϓ��Ȃ̂��ڗ��B�}�j�s�����[�^�����炢���o�����X�ɂȂ����Ⴄ���ȁB��������Ƙr���������Ă���͂���ł܂��ςȂ��ǁB�@�S�̂Ɋۂ݂�тт��f�U�C���ɂ����������̂����A��������Ɖ������ł��߂̉��͈͂��ڌ��肷��B�@���ꂪ�ǂ����Ă��C�����������A�ӂ���݂�݂����炱�����肵���炷���ɊO�������Ă��܂����낤�Ƃ������ƂŃT�[�{��t���[���ɖ���\��悤�ȃC���[�W�ō���Ă܂��B�@���ꂩ���鑫�̊O�����������������B�@��̕t�����Ƃ����߁A�Ҋ߂��Ȃ�Ƃ����������ǁA�����͕��G���ȁ[�B
 �@�h���O�ɉ��g�݁@
�@�h���O�ɉ��g�݁@ �@PLEN�@�@���Ă�B�Borz
�@PLEN�@�@����B�Borz
 �@�㓪�����Ƃ��Ƃ����t���܂����B
�@�㓪�����Ƃ��Ƃ����t���܂����B
���Q���Q�S����
����������O�����B�@�h�����܂����B�@�ł��A�h�����Ăނ������������B�@���������ɂȂ�����_���_���ɂȂ�����A����܂��Y��ɂł��Ȃ������B�@�܂��A�������肱�����肷������ɓh�����n�Q�n�Q�ɂȂ邩���Y��ɓh���Ă��Ӗ��������`�B�@�ƁA���܂����Ă݂���B(^^�U
�h���̑��ɂ���ڕ��̖،^��������肵�Ă��B�@���߂ăo�L���[���܂ł́B�B�Ƃ�������̂����A�،^�܂ł����ł��܂���ł����B
�H��������Ă��̂ɂ͗��R�������āA�@�Ƃ���DVD�̍쐬�𐿂��������̂����A�肽�J�������n�[�h�f�B�X�N�^�C�v�Ȃ���ŁA�p�\�R���ŕҏW���邵���Ȃ��A�i���i��HDD���R�[�_�[��ŕҏW���Ă�j�@DVD-RW�h���C�u���������ĂȂ������̂Őݒ肩�牽������Ȃ���Ȃ�Ȃ������Ƃ������Ƃ�PC���ĂȂ������̂��B�@���ǁA5�C���`DVD�h���C�u��ATA-USB�ϊ��łȂ��ł��������݂ł����AWin2000�������Ă���Â��f�X�N�g�b�v�ŏ������ނ��ƂɁB�Ȃ̂ɕҏW�\�t�g��Win2000�ザ�ᓮ���Ȃ��B�@(�[�[;)�@�Ȃ���ꂿ�Ⴂ�܂����B
�܁A���������킯�ŊO����ł���Ă�����ɓ����ɍڂ�����͓̂h�������㔼�g�����B�B�@����ڂ�B�B
 �@�G�Ȃ��p���ł��̃A���O�����Ƒ��������Z��������B���������g�̊O�������Ȃ��Ⴈ�����Ȋ������ȁB
�@�G�Ȃ��p���ł��̃A���O�����Ƒ��������Z��������B���������g�̊O�������Ȃ��Ⴈ�����Ȋ������ȁB
�O���̍\�z������Ă鎞�͊ߕ����͓��n�̖��x�̒Ⴂ�F���g���ăc�[�g�[���ŁA�Ƃ��A��Ƃ��Ҋߕӂ�͓����������Ȃ��悤�ȃV���b�^�[��̃J�o�[���A�A�Ƃ��l���Ă������Ȃ�[���A�J�o�[����̂ł���Ƃ��B�@
�㔼�g�ɊO�����t���ƁA�����g���z�l�z�l�Ɍ����邩��s�v�c�B�����J�o�[���Ă��˂B
���͂��Ȃ����J�����̃Y�[����ւ����ł���悤�ɂ������ɋ���LED���d���̂����A�J�o�[��������LED�������Ȃ��Ȃ��Ă��܂����B(^_^;)�@���J���悤���Ƃ��������̂����A���傤��LED�����ɃJ�o�[�̕⋭�����Ă��܂��Ă�����ł��Ȃ��Ȃ��Ă��܂����B�@�܁A�������[�B���̂����l���悤�B
���Q���Q�U����
����͈��݂ɍs���āA�����萌�������Ă��܂����B�@��������Ńw���w���Ȋ����B�@�ǂ����A�x���x���Ƃ���ׂ�Ɛ��������炵���B�@�x���S�������̂��Ȃ��B
�@
�����͗��K�҂��������̂ő����A���Ă����̂����A���{�邱�Ƃ͂ł����B�@��ڕ��̃o�L���[�������Ă��܂����������̂������ʂĂʖ��ł����B�@���߂Ă��Ǝv���āA��ڕ��̖،^�̎d�グ�Ȃǂ��y������Ă���܂����B
 �@����͍����̑�ڕ��@�I�[�o�[�n���O��������̂ŕ����^�ł��B
�@����͍����̑�ڕ��@�I�[�o�[�n���O��������̂ŕ����^�ł��B
�����ނ��A�A�i�X�ɂ��������X���������ł邩�ȁ[�Ǝv�����̂����A������Ƌ^��B�@�ΖʂłȂ��ň�̊����o���������X�}�[�g���낤���B�@��������Ɠ���������Ȃ̂ő����Č�����̂��C���Ȃ̂��B
�،^�̍쐬�ɂ̓o���T�ނ��g���Ă���̂����A�o���T�ł������Ƃ��낪�����āA�J�b�^�[�łȂ��Ȃ����Ȃ�����������B�摜�̉����̃p�[�c�������ŁA���H����̂Ɍ��\��J�����B�@���[��̃J�b�^�[�ō���Ă���̂����A�P�p�[�c���H����Ɛn�͊ۂ܂��Ă��܂��B�ǂ�ǂ�Ɛn���������Ă���̂����A�������Ȃ��Ŗڗ��Ă��������������ȁH
�@
�����͒�����o���Ȃ̂ŋ��炭�A��͐��������B�@�����͈��݂����Ȃ��Ȃ��`(>_<)�B�@����ŋA��ƍ�Ƃł��Ȃ�����B
���R���P����
��������R���B�@�y�[�W�͒��X�ɒ����Ȃ������ǁA�O���l�^�����Ȃ�Ȃ̂Ńy�[�W��ւ��͂���������Ɛ扄���ɁB
���̃E�B�[�N�f�[�́A���݉��痈�q���łقƂ�Ǎ�Ƃ����ł����B�@�����͐�T�܂łɍ�����O���̖{���t���Ɖ����g�̊O�����ɒ���B
�O���͗��ʃe�[�v�Ōy���Œ肷��Ⴂ����[�A�ƍl���Ă����̂����ǁA�P�[�u���ʼn����ꂽ��O�͂ŝ��肵���炷���ɊO��Ă��܂��B�@��͂�܂��߂Ƀl�W�Œ肵�Ȃ���X�g���X�̌����ƂȂ肻���B
 �@�A�^�}�̊O���̌Œ�B
�@�A�^�}�̊O���̌Œ�B
��ʃJ�o�[�̃l�W�͌㓪���J�o�[�ʼnB��邯�ǁA�㓪���J�o�[�̌Œ�l�W�͓����ɂ��邩�猩���Ă��܂��B�@�l�W�������Ȃ����邱�Ƃւ̂������́A����̊O���ł͓��ɖ����̂����ǁA�������ɓ��̂Ă���Ƀl�W��������̂͂�Ȋ����Ȃ̂ŁA������ƍH���Č����Ȃ����悤���ƁB
 �@�������̃J�o�[�B�@���ʃe�[�v�ŌŒ肵�Ă��A�O��ĊJ���Ă��܂��B�@�C���C�����炢��(�[�[;)
�@�������̃J�o�[�B�@���ʃe�[�v�ŌŒ肵�Ă��A�O��ĊJ���Ă��܂��B�@�C���C�����炢��(�[�[;)
��r�̃J�o�[�̓T�C�Y�������ĂȂ������炵���B���t���Ă��炭����ƃp�b�J���ƊO��Ă��܂��B�،^�������čč쐬���Ȃ��B
 �@��r�J�o�[�̕Жʂ��O�����Ƃ���B�摜���ጩ���Â炢���ǁA�W���C���g�{�[�����̌������ĉE���̓L�c�L�c�ɂȂ��Ă���B�ނ��B
�@��r�J�o�[�̕Жʂ��O�����Ƃ���B�摜���ጩ���Â炢���ǁA�W���C���g�{�[�����̌������ĉE���̓L�c�L�c�ɂȂ��Ă���B�ނ��B
 �@���̃P�[�u���o�H�B
�@���̃P�[�u���o�H�B
���܂ł́u���g�ݗ��Ă����炟�`�v�Ƃ������āA�K���ɃP�[�u���킹�Ă������A�O��������ƂȂ�Ƃ������s���Ȃ��B�@�u���P�b�g�ɃP�[�u�����������J���āA������ʂ��悤�ɂ����B�@����ŋ����̃J�o�[�̎��t�����X�b�L�������B
�r�̊O���̎��t�����������Ă݂āA���[�������瓷�̂������Ē������Ȃ���Ȃ�Ȃ����ƂɋC�t�����B�@��ڕ��̖،^�͊��������̂����A��ɑ���J�o�[���Ă������Ƃɂ����B
 �@�@
�@�@ �@�@�����̃T�[�{�J�o�[�̖،^�Ƒ���T�[�{�B
�@�@�����̃T�[�{�J�o�[�̖،^�Ƒ���T�[�{�B
�u�O���v����Ȃ����ς�f�U�C������������Ƃ͗~�����Ȃ��Ƃ��v�������A���̃f�J�T�[�{�ɂ���ȗ]�T�͖����B�@�Ƃ͌����A������ƋȐ����g���Ă݂���B�B�B
 �@��r���ł̎��s������̂ŁA�������o�L���[�������āA���t���Ă݂��B
�@��r���ł̎��s������̂ŁA�������o�L���[�������āA���t���Ă݂��B
���s�������̒������V�r�A�ɂ��Ȃ���Ȃ�Ȃ��悤���B�@���܂͂�����Ƒ傫�߂ɂł��Ă��܂��Ă���̂ł���������l�߂�K�v������悤���B
�@
�����J�o�[�̌Œ�l�W�����J����Ƃ���܂ł͂ł������A�J�o�[���̉��H��������B�@���钆�ɂ��ꂭ�炢�͏I��点�����Ȃ��B
�@
�@
�E�E�E�E�E�E�E�E�E�E�H����������ǁA�����v���O��������肽���Ȃ��`�@(>_<)
���R���Q����
���������O���B
�����J�o�[�̌Œ�ƌ㓪���̌Œ�͂��܂������܂����B���̂Ă���̃l�W�͂���Ȋ�����
 �@���A������ƃs���{�P���B�Ă���̎l�p�������̒����Ƀl�W�������邯�ǁA�B���Ă�B
�@���A������ƃs���{�P���B�Ă���̎l�p�������̒����Ƀl�W�������邯�ǁA�B���Ă�B
 �@�B���̂ɂ���Ȃ̍��܂����B�@�����J�b�e�B���O�V�[�g�ɓ����F�œh���B�ӊO�Ɩڗ����Ȃ��B
�@�B���̂ɂ���Ȃ̍��܂����B�@�����J�b�e�B���O�V�[�g�ɓ����F�œh���B�ӊO�Ɩڗ����Ȃ��B
�J�b�e�B���O�V�[�g�͓h�����Ă������ƒP�ʂɔ���������̂ŁA�킴�킴�蔲���Ă���h�����Ă܂��B�h�����w�^�N�\�Ȋ���ɍׂ����C�z��(^�B^)
�����đ��̊O���A�Ō�̕��ʂ͕G�T�[�{�̃J�o�[��
 �@�G�T�[�{�̃J�o�[�B�@�o���T�ނ�����Ȃ��Ȃ��Ċ�؍H�B�@�ł���Ԑ��x�ǂ��ł����B
�@�G�T�[�{�̃J�o�[�B�@�o���T�ނ�����Ȃ��Ȃ��Ċ�؍H�B�@�ł���Ԑ��x�ǂ��ł����B
 �@����T�[�{�́A��O�̃��[�^�[����ʐF�œh���Ă݂��̂����A�I�F�~�X���ȁB�_�[�N�O���[���ɂ��ׂ��������B
�@����T�[�{�́A��O�̃��[�^�[����ʐF�œh���Ă݂��̂����A�I�F�~�X���ȁB�_�[�N�O���[���ɂ��ׂ��������B
RS601CR�̓f�J�T�[�{�Ȃ̂ŁA�ǂ����Ă����{�b�g�̎葫�������Ȃ��Ă��܂��B�@���[�^�[����������Ɩ��x���Ⴂ�F�œh�邱�ƂŖڗ����Ȃ����āA�����ڃX�}�[�g�ɂł��Ȃ����Ǝv����2�F�ڂ̐F��T���Ă���̂����Ȃ��Ȃ������F���Ȃ��B�@���ꂾ�Ɠ����F�̕��������Ȃ��B
�����āA�����̃J�o�[�̂������o�L���[��������āA���t���Ă݂��B�@���`�A�F����������킩�������ƃS�c�C�Ȃ��B�@2�F�h���ɂ��邩�B(^_^;)
�p���c�����͌����ō�������f���B�@�u�����߁v���u�܂킵�v���Ǝv���Ă����ǂ������Č���ƃu���[�t���ۂ��ȁB
�ꉞ�ł�����Ă݂āA��Ԗ��Ȍ`�Ȃ͕̂G��̑�ڕ����[���T�[�{���Ƃ����̂��킩�����B�@�����ł������ɑ傫���̂ɃP�[�u���_�N�g�����čX�ɕ��L�ɂȂ��Ă��܂����B�G�ߕ����̌`���l���s���ŃJ�o�[�̌`�������i��������Ă��܂������j�@����������ƌ`���������Ȃ�����Ȃ�Ȃ����낤�B
���R���R����

�����EeePC���܂����B�@�u����Ɓv���ď��������ǁA�قڗ\��ʂ肾����(^_^;)�@��Q���b�g���낤����SD�������[���ĂȂ��Ǝv������SGB��SD�������[�����Ă܂����B�@�ł��A�P�UGB��SD�������[����������������ǁB
�킩���Ă����lj�ʂ��������ł��B�@����܂�F�X�C���X�g�[������̂͂�߂āA�T�N�T�N����厖�ɂ������ȂƎv���Ă܂��B�@�����_�p�̃N���C�A���g�A�v���͉������Ȃ��Ǝg���Ȃ��ȁB��ʃT�C�Y�ɍ��킹�Ȃ���B
 �@���F�̑����B�@�摜���Ƃ�����Ɩ��邭�ʂ��Ă邯�ǁA����������Ƃ����B
�@���F�̑����B�@�摜���Ƃ�����Ɩ��邭�ʂ��Ă邯�ǁA����������Ƃ����B
����Ȃ�ǂ����낤�B����̂��͂����Ǝv���̂����B
�����āA���̃J�o�[�̒����B�@�����猩�āA�P�[�u�����[�g�̌����B�@�t���[���ɃP�[�u���ʉߗp�̍a��݂����肵�ĊO�����l�߂���Ƃ���͋l�߂�B�@�P�[�u�������������č�蒼�������Ƃ���B�@�d�������������Ȃ��Ǝv���Ă����炿�傤�ǂ����@�������Ȃ��B
 �@�����_�̑����ォ��B�@�摜�̏㑤�����摤�ł��B
�@�����_�̑����ォ��B�@�摜�̏㑤�����摤�ł��B
�X�^�C��������������̂͂�͂�J�o�[���傫�߂��邩�炾�낤�B�G��̃J�o�[�̓M���M���܂ōi�����B�@�G�T�[�{�Ƃ̐ڑ�����������������Ƃ��т������悤�ɍl����B�@�l�W����яo�������l�����ĉ����ɃJ�o�[��L�����̂����������炵���B�@�l�W�̂ق������Ƃ����ăJ�o�[�͏��������悤�B���т���đ�ȂȂ��B
���͖c���F�����Ă̂��W���邩���H�H�H
�@
���ƁA�葫�͍��i�Ƃ��̈Â��F�j�ł��������ȁ[�ƁB�B�B�@�p���c�͗������Ȃ��Ƃ����ȁ[�ƁB�B�B�@
���R���S����
ONO����̕ǐV���̓��{�����o��\��̕������̈���ꓬ���Â��Ă܂��˂��`�A�@�����_�͏o�ꂵ�Ȃ��̂œۋC�ɊO�����Ȃ��B�B�@����A�ۋC����Ȃ���ł��B���\�������Ă͂����ł����A�A�A�����ꑧ�ŃA�}�e���X�ƕ���Ŏʐ^�Ƃ��Ă��p���������Ȃ��Ȃ�͂��B����ꃉ���_�A�@����A�����I���B
�����̂����ɑ��̖،^���C�����čēx�e�X�g�o�L���[���A�A�Ȃǂƍl���Ă������A�c�Ƃ�����A�W�����v�R�~�b�N�X�̔�������������łR�̂����̈�̖،^�����C���ł��Ȃ������B
 �@��ڕ��㕔�̃T�[�{�J�o�[�B�X���������o��悤�ɐ�l�߂��B
�@��ڕ��㕔�̃T�[�{�J�o�[�B�X���������o��悤�ɐ�l�߂��B
 �@�d�˂Ă݂č������݂�B����ł����T�[�{�ɃL�`�L�`�̂͂��B���������߂������I�B
�@�d�˂Ă݂č������݂�B����ł����T�[�{�ɃL�`�L�`�̂͂��B���������߂������I�B
���ʂɂ̓P�[�u���_�N�g��݂���\��B�_�N�g�̓`���C���߂ɂ��Ƃ����B
�����͈��݉�Ȃ̂ł����ƍ�Ƃ��ł��Ȃ��B����Ɩ؋��ő��̃J�o�[�����܂ł͓�����B�@�ژ_���ł̓E�B�[�N�f�[�ɑ��̃J�o�[���o�L���[�����ēh����y���ɂ������B�X�Ƀp���c�����̌^��y�j���ɍ���ēy���̊ԂɃp���c�����̊����܂ł�������\��B�@
�O����肾���ƋÂ�������Ă܂��������ł��B��邽�тɏC���������Ȃ��Ă���B��r���́A�����č쐬������肾���B�@��ʂ�������v���O�����ɖ߂�Ȃ��ƂȂ��`�B�@���{�r�����[�h�A���܂ł����Ă��ł��₵�Ȃ�(�[�[;)
��������p���c�͑����s�]�ŁA�u�p���c�݂����v�Ƃ��u�������Ă܂킵�ɂ���v�Ƃ��A�u�C�`�S���ɂ���H�v�Ƃ��D�����茾���Ă܂��B�@����A����͎Ă�̂��H�@�C�`�S�������`�E�E�E�B
���R���U����
����̈��݉�́u�ē�����v������邭�炢�̎��ԂɋA��銴�����������ǁA�Ŋ�w�̈��O�ō~��ĕ����ƃT�V���݁B�@���ǍŏI�̓d�Ԃɔ�я���ċA��܂����B�@�����č����͓������(�[�[;)
���������،^�̏C�������Ă����̂����A�ؖڂ����̕����̓x���g�\�[���g���Ɛ��b�Ȃ̂ɃJ�b�^�[�ō��Ə��ꎞ�Ԃ�������Ă̂����ق炵���Ȃ��Ă��āA�x���܂Ŏ����z�����Ƃɂ��܂����B�@����āA�E�B�[�N�f�[�̂����ɑ��̃J�o�[���o�L���[���Ƃ����v��͂��낭�����ꋎ��܂����B
����ɂƌ����Ă͂Ȃ��ǁAEeePC�p�ɔ�����SD16GB��2MB�̃������[�J�[�h�����������̂�EeePC�̃V�F�C�v�A�b�v�ݒ�Ȃ�����Ă܂����B�@����Ȃɂ�������͂Ȃ����ǁA�e���|�����[�f�B���N�g���[��RAMDISK�ɂ��邭�炢�͂���Ă������ƁB�B�B�@�Ȃɂ����C���̃m�[�gPC��胁�����[���ł����Ȃ����܂��܂�������(^_^;)�@������Ƃł��L�����p�ɂƁB�B
���ƁA���C��PC��SDHC��F�����Ȃ��B�B�i����Ⴛ���Ȃ��ǁj�@�@����̗��ꂪ����߂����B�@(�[�[;)�@�@4GB��SDHC�J�[�h���]�������ǎg�����Ȃ��Ȃ�
���R���V����
�H��͓����������ɓd���H����g���āE�E�E�@���Ă��Ƃɂ����̂ŋ��j�̖�͖،^�C���͂�炸�B�@��Ȃɂ��H���Ă��ƂŁA�v���O���������ċC�ɂȂ�Ȃ��B�@���S�ɋC���͊O���H�샂�[�h�ɂȂ�������Ă�B(^_^;)
���႟���Ă��ƂŁA�����O�Ƀo�b�e���[�̓d���ቺ���m�Ŏ����I�ɃV���b�g�_�E�������邽�߂�PIC���g�����Ǝv����PIC�P�QF675�Ƃ��ꂪ�����郉�C�^�[�̃L�b�g���Ă��̂��B����̓����ł���낤���ȁ[�Ǝv���������B
�ł��A���ꂩ��A�Z���u�����Ă̂͂߂�ǂ������̂Ńt���[��C�R���p�C���͂Ȃ����Ȃ��ƃl�b�g�ŒT���Ă���ƁA�A�@�ӂޗL�肻�����B�U�V�T�ɑ��Ă͋@�\�������Ȃ��炵���B�G�A�[�o���A�u���@���ăT�C�g���ڂ������Ȋ����B
�����C���X�g�[�����ăT���v���v���O���������āA���C�^�[��g�ݗ��Ă�PIC�ɏ�������ŁA��H��g��œ��삳���Ă݂�[�A�@�Ǝv�������A�Ȃ��{�����IDE���C���X�g�[������ƕs����ǂ����炱�����珑���Ă�B�@���ނނ��A����͖ʓ|���ȁ[�A�@�����������Ă邯�Lj�C�Ƀe���V�����_�E���B�@�G�f�B�^�ɓ��{��R�����g�������牻�����Ⴄ�Ƃ����������ǂ��ł������s������S�̃u���[�L�ɂȂ��Ă��܂����B(>_<)�@����͉��̗J�����Ȃ��ł��郉�C�^�[�̂͂t����������ĐQ�邩�`�B�@�����Ȉ���ł͂��邪�O�i�����I�@�Ȃ���āB�@(^_^;)
���R���W����
����Ƌx���B�@�ߑO�����炪����Ė،^�̏C���ƃp���c���̖،^�̐���B
 �@�A�N�Z���g�Ƀv���o���i0.5mm�j�Ń��C�������Ă݂��B�@�K�V���K�V�����ĂĈ�̊����Ȃ����炱��ł�����Ƃ́B�B�B�H
�@�A�N�Z���g�Ƀv���o���i0.5mm�j�Ń��C�������Ă݂��B�@�K�V���K�V�����ĂĈ�̊����Ȃ����炱��ł�����Ƃ́B�B�B�H
 �@�p���c�@(^_^;)�@�@�RDCAD�ɓ��͂��ĎO�ʐ}���o�͂��ăK�C�h�ɂ��܂����B�@�Ȃ��Ȃ����܂��ł����B
�@�p���c�@(^_^;)�@�@�RDCAD�ɓ��͂��ĎO�ʐ}���o�͂��ăK�C�h�ɂ��܂����B�@�Ȃ��Ȃ����܂��ł����B
�@
�ߌォ��̓o�L���[�����܂���B
�ȂA�p���c�~�P�@���͕Б��łS�ӏ������āA���ꂼ���2���o�L���[�����˂Ȃ�Ȃ��B�����0.5mm�~2�̐ϑw�o�L���[��������R�S�o�L���[���ł���B
 �@
�@
�����܂łŗ͐s�����B�@�����o�L���[���Ȃ�Č����ł��B�@����łP�S�o�L���[��������܂�Ԃ��n�_�ɂ����B���Ă��Ȃ��B(>_<)
�ł��A���ꂾ���������o�L���[���̃R�c������ł����B
�E�v���o���̌Œ�͂�������ƁB�@�v���̌Œ�ɂ̓K���e���g���Ă���ǁA���������Ȃ��悤�����ǁA�ė��p�Ƃ��͂��Ă͂Ȃ�Ȃ��B�ґ�Ɏg�����ƁB
�E�v���o����g�߂�Ƃ��A�K���e��������Ă��܂����Ƃ�����B���\���݂ɒg�߂�ƃK���e�����܂�߂����ɂ��ށB
�E�v���o�����M�̉����͌Œ�{�[�h���R�c�R�c�@�������A�v���o�����v���v���k����l�q�Ŕ��f����B�@�o���邾���L���͈͂��v���v������悤�ɉ��M���邱�ƁB
�E�،^�͌Œ肵�Ȃ��Ă����v�������B�������������Ɉ�C�Ƀv���o���������t���邱�ƁB
�E�،^�͕��������肷��Ƃ��������C���z�������ăv���o�����j���B�@�L�`���ƕǂ�����ċ�C�����������Ȃ��悤�ɁB
�E�،^�̕\�ʂ͕����Ȃ��Ɣ����������B�`���[�N�Ŗڋl�߂���Έꋓ�����B�i�܂����������̏o����j
�E�v���o��1�~���Ȃ�A�،^�ɔ����e�[�p�[�������Ƃ܂������Ȃ��B�@0.5�~���Ȃ�܂��܂�������B
�E0.5�~���ϑw�o�L���[���Ȃ��Ȃ������B���������Ԃ�����B
�������͎c��̃o�L���[�������邩�A���Ƒ���������Č�둤�̃J�o�[�͎���ɂ��邩�B�@�@�c��̃o�L���[�����邾����1�������肻�������獡��͒��q�ʼn䖝���悤���ȁ[�B
���R���X����
��������̂��������܂ł����ł��Ȃ������B�@�����̂����ɓh�������Ƃ�������Ă݂��������̂ɂȁB�@�h�����Ă��Ȃ��ƒE�炵���Ă̍����݂����@(>_<)�@���Ȃ݂ɂ��ׂ�0.5�o�ϑw�o�L���[��������O�����v���Y�}�ŏĂ���Ă��E�炵�ĕ������邱�Ƃ��ł���A�A�Ȃ�Ă��Ƃ̓A���}�Z���B(^^�U
 �@�}�j�s�����[�^�҂��̉��r�������Ȋ����B�@�J�}�L���H
�@�}�j�s�����[�^�҂��̉��r�������Ȋ����B�@�J�}�L���H
�p���c���͎��t���Ă݂�ƁA����ς肨���߂��Ċ������B�ۂ݂������������ȁB�Ȗʂ̂Ȃ����Ȃ��炩�ɂ����̂��w�ɂȂ������B�@�Ő������Ă������������V���[�v�ɂȂ��������B�@�n�C���O�ɂ���ƃA���Ȃ�ŁA�p���c���C�����߂ɂ����̂����A�Ҋ߂̉��͈͂��啝�ɋ��܂��Ă��܂����B�@����Ɏx�Ⴊ�Ȃ����ǂ����͕ʓr�����B�@�������v���Ǝv�����ǂȁ[�B
���̃J�o�[���ғ����Ɍ��܂ō�����̂ŁA���J���J�`�b�N�ɂȂ��Ă���B���Ƃ��ƃX�}�[�g�ł͂Ȃ��̂ŃJ�o�[�Ńf�u��̂��������`�ɂ����̂����A�f�u��͖h�����Ǝv���Ă��邪���`�I�ɂ͂ǂ����ȁ[�B�@�J�o�[���������l���������Ă���C���Ȃ��ł͂Ȃ��B
���r���͕ʂƂ��āA�O�ʂ͈�ʂ�ł����B�@�w�ʂ͂���������Ȃ����G�v�������(^_^;)�@�E�B�[�N�f�[�̂����ɂ����ƃo�L���[����Ƃł��邩�ȁB�i�����ł���j�@�w�ʂ̃J�o�[�����O�ɃP�[�u�����O�����������˂Ȃ�Ȃ��̂����A���������t���[�������H�i���X���ō����x�����ǁj���Ȃ���Ȃ�Ȃ�����������B�@�����ЂƂ����B
���R���P�P����
�����͒�����ڋq��֏o���B
��������������EeePC�������Ă����Ďv��������������Ă����Ƃ������Ƃ�����Ă݂悤�B�}�ʓI�Ȃ��͎̂��Ɖ��M����ԂȂ̂����A���͂̓L�[�{�[�h�̕��������Ɗy���B�i���Ƃ����ꂪEeePC�̂��������L�[�{�[�h�ł��j
�\�����̊O���̃C���[�W���ł��Ă����̂ŗF�B�Ɉӌ������߂Ă݂��肵�����A�T�˕s�]�B�@�u���������v�ƌ����̂������ς�̕]�Ȃ̂����A����͑O����Ȃ��ǂȂ��`�B�t�ɊO�������Ă��f�u��Ȃ������Ǝv���Ă��āA���܂��������ȁA�Ƃ��v���Ă����̂ł�����ƃV���b�N�B
�T�[�{�Ƀt���[�������̎��̓��t�f�b�T���݂����Ȋ����ŊO�σ��C���������̃C���[�W�ō\�z���Ă��܂��Ƃ��낪�����āA���͎��������Ă��Ȃ������肷��B�O���������ƂŌ�����˂������Ă���͑����Ȃ��`�ƂȂ�̂��ȂƁB�B�B
��r�̊O����������i�K�Ŏ���������������Ă��āA�O���Ȃ��̘r�������Ƃ��ɃC���[�W���Ă���I�̈ʒu�͎��ۂ̕I�߂̈ʒu����̕��ɂ���B�O������Ɓu��r�������Ȃ��`�v�Ɗ����Ă��܂��B�I�̈ʒu�������Ƃ͂ł��Ȃ��̂ŁA�O���t�B�b�N�C���[�W�����ł��ς��Ă݂悤���ȁA�Ƃ��͍l���Ă���B
���̑����͕��̖��Ō��݂͔����炾�B���ݕ����ł͖c��܂��Ċۂ݂����ē��̂̃C���[�W�ɍ��킹��Ƃ������Ƃ͂ł��Ȃ��Ȃ��̂����A��������Ɗ߉��͈͂����܂�̂ƁA�]�|�����肵���ꍇ�ɊO�����Ԃ�Ȃ��悤�ɋl�ߕ������Ȃ���Ȃ�Ȃ��B�ǂ̒��x�̏d�ʃA�b�v�ɂȂ邩�͂킩��Ȃ����A���̂Q�_�Ō��݂�c��܂���Ă͖v�ɂ����B
�������͋����̊O���ɂ������āA���̖c��݂�݂��邩�ǂ���������ƔY�̂����A�c��܂��āA�v���ɂ͋l�ߕ������Ă���B�@�ق�̏�����������邾���ł��������ɂȂ����̂ŁA�l�ߕ��Ă̓A����������Ȃ��ȂƂ��v���Ă���̂����A���������������̂ō���͂���������B
���������[�ȁ[�Ǝv���ĉ䖝�ł��Ȃ��Ȃ�����Đ�����l���悤�B�@��̂ɂ��đf�ށi�T�[�{�j�������B�@�X�^�C���d���������炱�̃T�[�{�̗̍p�͂Ȃ�����ˁB
�@
������ƈ���ŋA���Ă������ǁA�v������葁���A�ꂽ�̂ŃT�[�{�̃P�[�u�������Ȃ�����Ă݂��B�@���̈����ő��̔w�ʑ��̃J�o�[�̃P�[�u���_�N�g�̌`���܂�̂ŏd�v�H���B
�o�����̂�����B
 �@�O���猩���炱��Ȋ����B�@�����͑���L���ĎB�e���Ă݂��B�@������ƃX�}�[�g�Ɍ�����H
�@�O���猩���炱��Ȋ����B�@�����͑���L���ĎB�e���Ă݂��B�@������ƃX�}�[�g�Ɍ�����H
 �@�֒f�̔w�ʎB�e�ɐ����B�@�P�[�u���̓A�Z�e�[�g�e�[�v�Ŏ~�߂Ă邩��ǂ������Ȃ��B
�@�֒f�̔w�ʎB�e�ɐ����B�@�P�[�u���̓A�Z�e�[�g�e�[�v�Ŏ~�߂Ă邩��ǂ������Ȃ��B
 �@�����̃P�[�u�������̊g��B�@����ς�悭�킩���B
�@�����̃P�[�u�������̊g��B�@����ς�悭�킩���B
�Ȃ�Ƃ��P�[�u���������镔�����ŏ��ɂ��邱�Ƃ��o�������B�@�܂�������ƌ�������ǁA�܁[�������낤�B�@100%��ڎw���Ȃ��̂����������@(^_^;)
�O�������邱�ƂŌҊ߂̉��͈͂Ƒ�ڕ��̃��[���߂ƁA����߂̑O������̉��͈͂������Ȃ����B�@���������{�I�ȓ���ɂ͉e���������͈͂ł͂���B�@�v���O�����ʼn��͈͊O�̊p�x�ւ̖��߂͏C�����ĉ��͈͓��Ɏ��߂�悤�ɂ��Ă���̂ŁA���̕ӂ�̃p�����[�^���C�����Ȃ���Ȃ�Ȃ��B�@�������ŗ}�������͔̂\���I�ȓ���ł����ĎI�Ȋ߂̓���͐�������Ȃ��B��ڕ��̃��[���߂̓P�[�u�����O�̊W�ł̉��͈͂̕ύX�Ȃ̂ŁA�I�ɓ��삵�Ă��܂��ƃP�[�u�������������Ă��܂��̂��B�@�@�B�I�ȃ��~�b�^�[������قǂł͂Ȃ��̂����A������ƋC�ɂ��Ă����Ȃ���Ȃ�Ȃ��Ȃ��B
���R���P�Q����
�����͑��̔w�ʑ��̊O�����o�L���[�����悤���Ȃ��`�A�Ǝv���Ȃ���ƂɋA���Ă����̂����A�C�t���Ə�r�̖،^�C���̕��j���ꐶ�����l���Ă����B(^^�U�@��r�����������A���r�ƃ}�j�s�����[�^���`�ɂ��˂Ȃ�Ȃ��B
�ł��A����Ȃ�Ƃ��P�[�u�����`�ɂȂ����̂ŁA�v���Ԃ�Ƀ����_�����Ă݂Ȃ���Ȃ�Ȃ��B�O�����������ƂŊ߂̉��͈͂��ς���������Ȃǂ̐ݒ�ύX�₻��ɂ�铮��̖��Ȃǂ̐o�������Ȃ���Ȃ�Ȃ��B
�،^�������肽���Ƃ���������Ɖ䖝���āA�����_�𗧂����Ă݂�B
 �@�B�e�p�ɂ�����Ɣw�L�сi�G���Ȃ����Ɂj���������_�B�r�̊O���͊O���Ă܂��B
�@�B�e�p�ɂ�����Ɣw�L�сi�G���Ȃ����Ɂj���������_�B�r�̊O���͊O���Ă܂��B
�܂Ԃ��������Ɠ������A�����̂����Ȃ��B�@���̊O���̓T�[�{���ƂɌ`�������������Ă��Ă���܂�O�����Ċ������Ȃ��Ȃ��B
�����ĐT�d�ɗ����オ�胂�[�V�����̌��B�@�������̂͌Ҋ߁B�@�����オ�胂�[�V�����ŌҊ߂�傫���Ȃ����������̂����A���̂Ƃ��ɐV�߉��͈͂��Ȃ������`�F�b�N�B�@�i�O�����O�ɍl���Ƃ����Ă��Ƃ���(^_^;)�@�j�@�O������������O�ɂԂ�Ă��܂��̂͂�邹�Ȃ��̂Ńp���c�͊O���ăe�X�g�B�@�u�����v�Ƃ����ŋC�t���Ă��܂����B�Ҋ߂̉��͈͂��������ď��̂��̂��E���Ȃ��I�I�I�@�E�E�E�E�E�E�v���I�B�@�X�ɂ͂���������̗����オ�胂�[�V�����ł��Ҋ߂�傫���Ȃ��邽�߂Ƀp���c�������܂܂ł͗����オ��Ȃ��B�@���Ȃ݂ɋ�������͑��v�B�@
�O���Ȃ��̃����_�͑O���P�P�O�x�܂ʼn\�������̂����A�p���c������ƑO���W�O�x�B
 �@�p���c�Ȃ��@�O��110�x�@�@
�@�p���c�Ȃ��@�O��110�x�@�@ �@�p���c���@�O��80�x
�@�p���c���@�O��80�x
����Ⴀ�A�ǂ����悤���Ȃ��B�@���X�Ƀp���c�Đv�ł��B
�y�j���ɐV�p���c�ƐV��r�܂łł��邩�Ȃ��`�B
���R���P�R����
�v���I�ł��B
�����̌ߌォ���B�֏o���B�@�y�j���ɂ������Ŏd���ł��B�@�p���c�̍�蒼���͓���Ȃ��B�@����ǂ��납�h��������B
�������ȁ[�B
���R���P�S����
��B�o���Ȃ��Ȃ�܂����B�@�悩�����[(^�B^)
�Ƃ����킯�ŁA�c�Ƃ��ċA���Ă���،^�C����ƁB
 �@��������
�@��������
�Ҋ߂̉��͈͂��L���邽�߂ɂ������ĐH�����܂��Ă݂܂����B�@���܂܂Ń����_�͐��ʕs���������̂ł����A�ǂ����j�������炵���B�@(^�E^)
�r�̖،^���C�������̂����A�ȂƂ����炩���Ă銴���ŁA�����������Ȃ��B�@����������ƔY�ނׂ��Ȃ̂��Ȃ��`�B�@�����ɂ̓o�L���肽�����ǁB�B
�@
�،^�����Ȃ���u�G�W�\���̕�v�ŏI������Ă܂����B�@�����A��Ԗʔ��������h���}�i�Ƃ������قڗB�ꌩ�Ă��h���}�j���������ǁA�ق̂ڂ̂��ĂĊy���������ȁ[�B��l���̌��l�͂ǂ�ȕ��Ɉ���Ă����낤�ȁ[�ƃh���}�̃L�����ɋv���Ԃ�Ɋ���ړ������Ⴂ�܂����B�@���ƁA���T�G���h���[�����y���݂ł����B�����҂��炩���Ă邵�B(^�B^)
�h���������āA���t�����B�@�r��������ƃA�N�Z���g�����Ă݂��B
 �@�G�����A�����Ĕ����ʂ��Ă�B�@�h���Ӗ����������(>_<)
�@�G�����A�����Ĕ����ʂ��Ă�B�@�h���Ӗ����������(>_<)
�p���c���`��ς��āA�O��110�x���o����悤�ɂȂ�܂����B�@����������̋N���オ�胂�[�V�������o���܂��B

���`�āA����ňꉞ�͐l�O�ɏo����悤�ɂȂ�܂����B�@���Ƃ͑��̗����Ɣw���Ƃ��K�ƕI����敔���B�B�B�B�@���\����ȁB�B(^_^;)
�{���͐F�X�Ǝ蔲�������Ă��āA�܂��܂��u�O�������v�t���O�͗��Ă��Ȃ���ł����ǁA���̏�ԂŊ������邱�Ƃ��\�����A�ʐ^�B�e���Ǝ蔲�������͂킩��Ȃ�����O�o�̓��V�ł��B
�����͗��K��B�@����1�������炢�O���ɂ����肫�肾��������V�A�C�e���Ȃ����A���{�����o�Ȃ����畂�����Ⴄ��������Ȃ����ǁA�v���Ԃ�ɎQ�����܂��B(^�B^)
 �@�s�b�N�A�b�v�f��
�@�s�b�N�A�b�v�f��