 �@�]�|�����s
�@�]�|�����s�J�������C���f�b�N�X��
�O�̃y�[�W��
���U���Q����
�]�|�����s���������Ă���y�[�W��ς����������̂�����ǁA�����I��邩�ǂ����킩��Ȃ����A�O�̃y�[�W�����������Ȃ����̂ō�������V�����y�[�W�ɁB
�������Ă����������[���͂����̂ŐV�����m�[�g�p�\�R���̐ݒ����C�ɂ���Ă��܂��B�@���肾�����̂Ƀl�b�g���[�N���Ȃ���Ȃ��BIP���ł��łȂ�Ƃ��f�[�^���ڊǂ�����A���x�͖���LAN����C���^�[�l�b�g�ɂȂ��Ȃ��B�ނ������ǂ��Ȃ��ĂB�@�Ƃ肠�����A�\��ʂ�ɖ���LAN��11g�ɕς������Ȃ̂ŁA�A�N�Z�X�|�C���g��ς��Ă���Y�����B
�p�\�R���̐ݒ�����Ă���ADELL�̉t���f�B�X�v���C���͂����B6��7�������\�肾�����̂ɁA�����ȁB����͐ݒu���邾���łقڏI���B
�����������Ă���Ō�ɐV�����g�ѓd�b���͂����B�@����ȂɃe���r�����Ȃ�����F904i�@�����Z�O�g�сB���̐ݒ���ʓ|���B�Ƃ肠�����̓A�h���X�������ڂ��Ă��Ƃ͂ڂ��ڂ���낤�B�g�т̐ݒ�͊O�ł��ł������ˁB
���ǁA�y�j���̌ߑO��������Ȃ���ȂŏI����Ă��܂����B�ߌォ��͓]�|�����s�ŏI�́i�ɂȂ�����̂����j����邼�[�B
���U���R����
�]�|�����s�̏��������ɃW���C���t�B�[�h�o�b�N������܂荞�B
�]�|�����s�łP�������o������A0.5�b�قǃE�F�C�g����B�E�F�C�g���̓W���C���t�B�[�h�o�b�N�œ����B�������]�|���Ȃ����x���̊p���x�����������Ƃ����W���C���t�B�[�h�o�b�N��������B
�������������ɂ��Ă݂���A�Ƃ肠�����A�K�V���K�V���Ƃ͂Ȃ�Ȃ��Ȃ����B
�܂��܂��M�T�Ԃ̔S�荘�ɂ͒������B�摜�͂��܂��������Ƃ�����o���������ł��B���́u���x�v���L�[�ɓ��삳���Ă���̂ł������Ɖ����ꂽ�ꍇ�ɂ͍R�����ׂ��Ȃ��B�p���x�Z���T�[�̃f�[�^��ϕ������f�[�^�ł̓I�t�Z�b�g�̗ݐςł��܂��p�������m�ł��Ȃ��B�����x�Z���T�[�̏o�Ԃ��ȁB�����������x����Ƃ�����s�v��ł̓T�[�{�̔������x�̌��E���Ă���B���x���傫���ƃg���N�͉�����Ƃ�����������B�����p���ɑΉ�����悤�ɏd�X��K�ɕς���Ȃǂ̏��Z���D������Ȃ���Έ��肵�Ȃ����낤�B
���ƁA������߂Ďg���Ƃ郂�[�h���������˂B
�����������A�]�|�����s�ɂ��肩�܂��Ă��Ă͂��ꂾ���łP�N���炢�͊ȒP�ɔ�₹�Ă��܂��B������ƃp���[�V�t�g���č\�����LjČ��ɒ��肵�Ȃ���I
���T�͍H�삩�Ȃ��`��
�E
�E
�E
�����̎c��̎��ԂŁA�����x�Z���T�[�̏����Ȃ��R�[�f�B���O���悤���Ǝv���Ă����̂����A�C���x���^�[�Ƃ̊i���Ŏ��Ԃ�啝�ɔ�₵�Ă��܂����B
�ȉ��A�]�|�����s�̉��ǂ̂��߂̋C�Â��������̂���ŗ��Ă����B
���U���S����
�����͂��̂������E�͊��Ɩ��C�ɏP��ꂽ�̂ŁA�Ƃ����₷���\�����������邱�ƂɁB
�������A�܂Ă�H�@����̌㔼�̓C���x���^�[�Ɗi�����Ă��̂������B�\�������̓v���O���������ȏ�ɔ]�݂����g���B�����̒E�͊��͍��̃C���x���^�[�̂��������H���Ƃ���Ɩ������E�͊����H
�����͋C�͂����߂ē]�|�����s�̉��ǂɎ��g�ނ���Ȃ̂����B�B
����A�b�v�����r�f�I������ƁA�����o�����O�܂ł̓W���C���t�B�[�h�o�b�N�œ�����Ă���l�q���f���Ă���B�Ȃ��Ȃ��Տꊴ����ȁB�@�d�S�I�t�Z�b�g���R���g���[�����邱�Ƃł���������Ǝp�����������Ԃ���ł�������o����̂ł͂Ȃ����ȁ[�Ɗ��҂��Ă���B
���Ƒ���_���p�[�̐ݒ������x�A�b�v�Ɍ��ʂ���̂ł͂Ȃ����Ɗ��҂��Ă���B
�]�|�����s�͕G�ւ̕��S���傫���炵���B���ʂ̕��s�̌��������Ă��Ă��T�[�{�����x�ُ�ɂȂ邱�Ƃ͖����̂����A���\�Z�����ԂŕG�T�[�{�̉��x�ُ킪���������B�\�����ǎ��ɂ͕G�T�[�{�̃��[�^�[���ւ̃q�[�g�V���N���t�����������悤�B�@�]�|���̃o���p�[���l���Ă����Ȃ��ƂȂ��B���nj�̍\���͍��̍\�����CPU���j�b�g�̘I�o�������BCPU���j�b�g���j�����S�������B(>_<)
���U���T����
�]�|�����s����ɔ����p����]�ł̏d�S�I�t�Z�b�g�̈������l���Ă��āA�ʏ���s�ł̃o�O�ɋC�Â����B
�d�S�I�t�Z�b�g���㔼�g�̏d�S�ʒu�ƕ��������̂����A�d�S�I�t�Z�b�g�͎p���̉�]�ɉe�����Ȃ��悤�ɂ����B�@�d�S�I�t�Z�b�g�͐��䑤�̓s���ŏd�S���ǂ��炩�̕����ɌX����x�����������Ă���̂ŁA�p���̉�]�i���i�s�����̒�`�̕ύX�j�ɂ͉e�������Ă͂Ȃ�Ȃ��͂��������B
�����A���ۂɏd�S�I�t�Z�b�g�𑫎p���ɔ��f�����Ă����ԂŎp������]��������d�S�I�t�Z�b�g���K�R�I�ɉ�]���Ă��܂��͓̂��R�������B
���s�ɂ����Ă̓J�[�u���s�̍ہA�P���������Ɏp����]�����{����B�p����]�̊p�x�����������ߎ�������Ȃ��̂����A�������͎p����]���ɏd�S�I�t�Z�b�g���i���p���ɍ��킹�āj��]�����A1���̓���̒��Ŗ{���̏d�S�I�t�Z�b�g�ֈڍs����A�Ƃ������삪�K�v�������B
�����g�p���̈�ʉ����A�J�[�u���s���A������Ȃ��Ƃ����Ȃ������������Ă����B���̕ӂ�ň�x���s���[�`���̂��ȉ������s��������������������Ȃ��B
�]�|�����s�ɂ��ẮA�d�S�I�t�Z�b�g�̏������C���v�������g�����B
�������Ԓ��ɓ|�������Ƌt�̕����ɃV�t�g����B�������A�V�r���A���Ԃɓ˓�����ƁA�d�S�I�t�Z�b�g���[���̕����ɖ߂�������s���B���̃^�C�~���O�ɂ͉������K�v��������Ȃ��Ǝv���Ă���B
�]�|����̂P�����o������͂O�D�T�b�̂��߂�����A���̊Ԃ͂ܐ�œ�����Ă���B�@�����A�d�S�I�t�Z�b�g�̖߂���������x�������s��Ȃ���Ȃ�Ȃ��Ƃ�����A���蓮������Ȃ�����A�d�S�I�t�Z�b�g�̃[�����A������s���Ƃ������ƂɂȂ�̂����A���܂������̂��ȁH����̒��Ŏ��܂��Ă������肪�����̂����B
�V�r�̑���_���p�[�̐ݒ���ύX���āA�V�r�����n����Ƃ��ɂ͑�����ł�����悤�ɂ��Ă݂��B
���ƁA�]�|����̐��������グ��ɂ͗V�r�̂ܐ�グ���K�v�B�H�ʂ̌X�ɂ��Ă͋t�^���w�v�Z�ɐ܍��ς݂Ȃ̂ł���͈ӊO�ƊȒP�ɃC���v���ł���Ǝv���Ă���B
�ܐ�ȊO�̓R�[�f�B���O�ς݂Ȃ̂ŁA�����ɂł�������������Ă݂悤�B
�������A��Ԍ��ʂ����肻���Ȃ̂́u�ܐ�グ�v���낤�ȁ[�B
���U���U����
���Ȃ����̋x�݂ɉ���������ČÂ��n�[�h�f�B�X�N������g��Ȃ��o�b�̃J�[�h�ނ����������B
�n�[�h�f�B�X�N�͔j�Ď̂ĂȂ��Ⴤ�o�C������B�ƌ����āA��`�A����f�[�^�����Ă����ȁ[�H�H�Ǝv���Ȃ�����n�[�h�f�B�X�N�̔j����B��������x�����特���o���悤�ȍ�Ƃ͂ł��Ȃ��̂ŁA�������ăf�B�X�N�����o���āA�J�b�^�[�ŃL�[�[�[�[���Ə������Ă������B�g���N�X�����Ă����番���ł������ǂȂ������疾���̋������݉���ɊԂɍ���Ȃ��Ƃ��낾�����B
����R�[�f�B���O�����]�|�����s�̃g���C�A���B
�d�S�I�t�Z�b�g��������A����̃_���p�[�ݒ��ς����肵�����A�ǂ��������ȈႢ���o�Ȃ��B����ς�A���s����Ƃ��́u�܂����v�ł��ˁB�V�r�̂ܐ悪�Ђ��������ďオ��Ȃ��B�オ��Ȃ����炻�̌�̑̑S�̂̓������S�����˕Ԃ��āA�����Y�f�[���Ƃ�����B���ɂ����Ȃ������������炢�B(T_T)�@�@��͂�ܐ�グ���L�����낤�ȁ[�B
������Ȃɂ��A���֑����o���]�|����������ς肤�܂������Ȃ��B�ȑO�̎����ł͌��ɑ����o���ق������܂��s���Ă����炢�Ȃ̂ɂȂ����H���삪���܂�ɂ����������̂Ńo�O���ۂ��C�����Ă�B�ā[���A�o�O���Ƃ����Ȃ��B
���U���V����
�������ʂ������āA�������ʂ��Ȃ��̂��A�g�ݍ��킹�Ȃǂ��܂߂Č������B
��͂�A�]�|�����s�͎p�������ꂽ��Ԃŕ��s���J�n�����̂��ʏ���s�ƈقȂ�_�B�@�Ƃɂ������ɂ����ʂɃO���b�v���Ȃ����Ƃɂ͕��s�͐��藧���Ȃ��̂ŁA�]�|������J�n����Ƃ��ɂ͑�������炩�����ď��ʂƂ̐ڐG��悤�ɂ��Ă���B
���̏�ԂŁA����̓v���O�������ێ����Ă���p���Ƃ͈قȂ�p�x�ɂȂ��Ă���\��������B���̏�ԂŗV�r�������グ�悤�Ƃ�����ܐ悪���ʂɈ���������\���������B�@���݂̐������̒Ⴓ�͂���Ȋ����ł͂Ȃ��낤���Ɨ\�z���Ă݂��B
�Ȃ̂ŁA�V�r�������グ����A�ܐ���グ��Ƃ����̂͂��������L���Ǝv���̂����A����I���ʂ������炳�Ȃ��̂ł͂Ȃ����Ǝv���Ă����̂��B
��͍l�����̂����A���܂��s�����ȁ[�H�H�H�@���܂��s�����猋�\���������オ��͂��B�@�܂��͂��̃A�C�f�B�A�������Ă݂悤�B
���U���W����
�\�������ƗV�r�O���̌����B
�\�������͂���Ă�Ƃ��̂��������x�Ŏ��Ԃ��o�B�@���̂������W�������Ⴄ�̂łقǂقǂɂ��Ƃ��Ȃ��ƃL�����Ȃ��̂��B
�z�u��t���[���\���͂قڌ��܂������A�]�|���̃o���p�[�ɂȂ�ׂ����獜���܂��ł��Ȃ��B���{�J�b�v�ւ͂ł���ΊO�������ďo�ꂵ�����̂����A�O����ABS��\��B������Ɗ���Ă��܂��̂ŏՌ�����̂̓A���~�t���[���Ƃ����\���ɂ������̂��B
����������ƔY�����B�@���T�̋x�݂̊Ԃɂ͔��H��͂ł��Ȃ��Ȃ��`�B�c�O�B
�V�r�̋O���͈Ă��ł����I
������ڂ��Ă��̂͐����ɊԈႢ���������B�Ȃ�����邢�Ȃ��[���Ƃ͎v���Ă���ˁB
����Ȋ����B�@���ԃO���t�ɂȂ��Ă��܂��āA�V�r�̓������킩��ɂ����B�@XY�f�[�^���āAXY�O���t�Ƀv���b�g���Ă����g���₷���\�t�g�͂Ȃ����ȁ[�Bgnuplot�Ƃ��ł��ł����������ǁA�g�������������Ȃ����璼���I�Ɏg����E�B���h�E�Y�\�t�g�I�Ȃ̂������̂����B�B�B
���s�i�����g�p���ڍs���čs���������������j�̏ꍇ�̗V�r�͒����̑g�ݍ��킹�������̂����A����͋Ȑ��ō���Ă݂��B�~�ʂ̑g�ݍ��킹�f�X�B�O���͊��炩�ɂȂ������A�V�r�̈ړ������͒����Ȃ����͂��B�Ή��ł���������Z���Ȃ��Ă��܂��B
���U���X����
���������V�r�O���̊����v���O�����ɓK�p���Ă݂��B�J�ڎ���0.4�b���ƗV�r���A�ɂ��Ă�����̂�0.2�b�قǁB9�X�e�b�v�قǂ̃J�[�u�ɂȂ�B
�������Ă݂��Ƃ���A���ʂ͂���B���͑��Ԋu�ő�160�o�Ƃ����ݒ�ōs���Ă���̂����A���ꂾ�ƕ��A���Ԃ���������Ȃ����H��{�I�ɑ��グ�������傫�߂ɂƂ�K�v������̂ŗV�r�O���͒����Ȃ����B�T�[�{�̃X�s�[�h�Ƃ̃g���[�h�I�t�����A���Ԋu�ő�l���������������߂ɐݒ肵���������肷��Ǝv����B
���������t�@�N�^�[�Ƃ��đ傫���悤�ŁA�����_�̍��̊�{�p���͍������i���m�ɂ͑���߂���Ҋ߂̋����j180�o�B�]�|�����s�ł͍�������������������s�v�������悤�ɂ��Ă���̂����A�Œ�l��150�o�B�@�]�|�����s�͍�����170�`160�o�ӂ肪��������悤�ȋC������B
��둤�ւ̓]�|�����s�͑��ς炸��������B�v���O�������������Ƃ��������Ƀo�O�i�v�Z�l�̋ɐ���K�ɐݒ肷�镔�������������Ă����B�Z�o���ɕ������������Ă��邽�߁A�������Ȃ��Ɖ��ł�����ł����̒l������Ă��܂��j�@�����A���ւ̓��������܂��Ȃ��̂͂��̂�������Ȃ��悤���B
��둤�ւ̓���ɂ��ẮA�ȑO�㔼�g�̏d�S�Əd�S�I�t�Z�b�g���Ǘ�����悤�ɂ����̂����A���̕ӂ�̒����i�H�j�ł�����x���P���邩�H�@�V�r�O���͑O�i����{�Ɍ������Ă��āA��ނ̏ꍇ�͋ɐ����t�ɂ��邾���Ƃ��������Ȃ̂����A���̕ӂ�ɖ�肪�B����Ă���̂��H�@�s�{�ӂł͂��邪�A���̍\���̕ύX��Ɏ��g���������I��������Ȃ��B
��{�p���Ƃ��āA�\���Ɉˑ����鐧��͂�肽���Ȃ��̂��B�ו���������������Ȃ��Ȃ���Ă̂��Ɓu���䂵�Ă���v�Ƃ͌����Ȃ����B
�����Ԃ�ƃp�����[�^�������Ă��āA������Ɣ��U�C���ł͂���B
�]�|�����s�́A���肵���J��Ԃ��^���ł�����s�ɔ�ׂ�ƃX�g�b�v���S�[����Ȃ̂Ō������B�@�����̊���~�߂��j��Ă��܂����B���ւ��Ȃ��ƁB�B
�u�����g�p���ڍs�v���u���s�v���A�����āu�]�|�����s�v���P�Ƃ̗v�f�Ƃ��ď������Ă����̂����A�u�]�|�����s�v�ɂ��Ă͈ꕔ�W���C���t�B�[�h�o�b�N�ƗZ�����Ă���B�ǂ����P�Ƃ̏����Z�p�Ƃ��ď�������͓̂���̂��낤�Ɗ����Ă������A���낻�뎟�̃X�e�b�v�Ƃ��ă}�N���ȈӖ��Łu�s������v���s��Ȃ��Ǝ��p�ɂ͂Ȃ�Ȃ����낤�B
�ł��A�u��ԑJ�ڕϐ��v�Ƃ��g�������Ȃ���ȁ[�B�����̎n�܂�̗\���B
���U���P�O����
���x�ł͂Ȃ��A�p���N���ł̓]�|���m�ɂ��Č������n�߂��B�䂭�䂭�͓]�|�g�̃g���K�[�ƂȂ�͂����B
���̉摜��XYZ�̉����x�Z���T�[�f�[�^�B�O�p�}�[�N�͓]�|�����s���s�����ӏ��ł���B
Z���Z���T�[�͐Î~�f�[�^�Ƃ��āu�����Ă���v���Ƃ������ȊO�ɂ͎g���Ȃ��B�����Č����Ȃ�]�|��Ԃł̎p���p�x��m�邱�Ƃ͂ł��邩�B
���{�b�g���i���̂��j�ǂꂭ�炢�X���Ă��邩��X���Z���T�[��Y���Z���T�[�Œm�邱�Ƃ��ł��������B�������A�����x�Z���T�[�͕���\���Ⴍ�ĂP�f��70���x�B���܂�ׂ��ȃf�[�^�͊��҂ł��Ȃ��B
������Ԃł�XY���Z���T�[�l�͂O�u�[���v�����A�T�x�X����
70�~sin(5deg)��6
�p���x�Z���T�[�ł̃_�C�i�~�b�N�Ȕ��f�ƁA�����x�Z���T�[�̃X�^�e�B�b�N�Ȕ��f���ǂ̂悤�Ƀu�����h���邩�����B
�܂��́A�����x�Z���T�[�œ]�|�p�x���Ď����ē]�|�����s���O�����鏈��������Ă݂悤�B
�u�܂����v�͗V�r�O���̍H�v�Ōy���ł����Ǝv�����A�x���r���O���b�v���Ȃ������Ŏ��s����P�[�X�������̂ł͂Ȃ����Ǝv���B���͒ʏ���s�ł̂܂����h�~�̂��߂ɂܐ�ɏ������e�[�v��\���Ă���B���̂����łܐ旧���̏�Ԃł̃O���b�v���Â��Ȃ��Ă���͂��Ȃ̂��B���̃e�[�v�����ɂ͗V�r���A���ɂܐ�グ���T�|�[�g���Ȃ���Ȃ�Ȃ��B�@�����Ɛ摗��ɂ��Ă������A�Ƃ��Ƃ��ܐ�グ���T�|�[�g���˂Ȃ�Ȃ���������Ă����悤���B�@�傰�������ǁB
�]�|����̎���������Ă���ƁA���{�b�g���K�V���K�V�������Ă����Ȃ��킢�����ȋC�����Ă���B�����Ǝg���Ƃ�悤�ɂ��Ȃ���Ȃ����Đ^���Ɏv���Ă����B�g������ǂ̂悤�ɃC���v�����邩�A�����ċN���オ�蓮����ǂ̂悤�ɃC���v�����邩���Y�܂����B���َp����IK�ŕ\������̂��Ȃ��Ȃ��Ƃ������������A���[�V�����̍Đ��͂Ȃ��C�������B
�Z���V���O�Ɋւ��Ă���������Ȗ�肪�R�ς��Ă���B�����Ă��邩�A�]��ł��邩�Ƃ����Q���Ȃ画��͊ȒP�����A���̒��ԓI�p���f����̂͂ǂ��������̂��낤�H�l�����܂p���Ɠ��̂̎p���i�X���j�����Ă��Ĕ��f������Ă��Ƃ����A��ʓI�ɕ\���ł���̂��낤���H
���炾��Ɠ]�|����̌����𑱂��Ă���̂����A���{�J�b�v�X�P�W���[��������ƂU�����{�܂łɍ\���ύX�����������Ȃ���Ȃ�Ȃ��X�P�W���[���������B�������]�|����͂T�����܂ł̗\�肪���ɂȂ��Ă��܂����̏�ԁB�\���ɂ��Ă͓��̂̊�{�\���܂ł͌ł܂��Ă���̂ł����܂ł����ł����삵�āA�K�[�h�Ȃ̕��i�͂��������lj����Ă����i�D���ȁ[�B�U���㔼�̓J�����ɒ��肵�Ȃ���Ȃ�Ȃ��B�����ŃX�P�W���[�����L�т�Ƃ��邸��s�����Ⴄ�̂��ڂɌ����Ă邩�玀�炵�Ȃ���B(>_<)
���U���P�R����
����A�����ƈ��݂ɍs�����̂ō����͋A���Ă��炽�܂����r�f�I���ӏ܂��A���炭���������������̂��߂̂P�W����ǂB
����͂�����Ɛ[���������̂ō����͂����[������ǂ������B�����������܂ܐQ��Ɛ����ɂȂ�Ȃ��ƕ��������Ƃ����邪�A����͎����������āA������������C���Ȃ������ȁB
���������킯�ō�����������i���Ȃ��B�����͏����͐i�������Ȃ���܂������Ď��ŁA�����x�Z���T�[�f�[�^���g�����]�|����ɂ��Č����B
�p���x�ł͑������Ȃ������i���x�j�ɂ���ď��X�Ɏp�����X���A�Ō�ɂ͓]�|�Ɏ����Ă��܂��ꍇ�̌��o���l����B
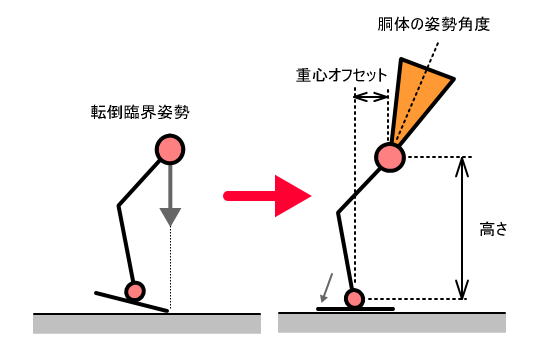
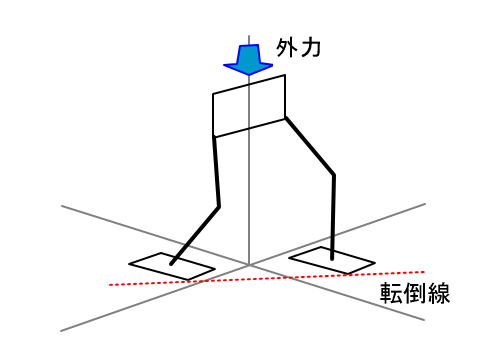
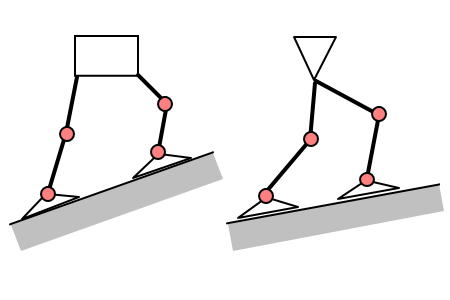
�ÓI�ɍl����̂�����A�d�S�_�ɓ����͂͏d�͕����B�d�S�_�̏��ʓ��e�ʒu���w�����p�`����o��Ɠ]�|���Ă��܂��B���̃M���M���̏�Ԃ��u�]�|�ՊE�p���v�ƌĂԁB
���̎p����]�|����̊J�n�g���K�[�Ƃ���̂����A�p���x�ōl���Ă������ƈႢ�A�m���Ɏp���͌X���Ă��邽�߁A�ʏ�̕��s�Ɠ����ɂ͍l�����Ȃ��B�@�܂�A�X�����p�������s�̊J�n�p���Ƃ��ĕ��e�����Ȃ���Ȃ�Ȃ��B
���͌X�����Ď����Ă��炸�A�p���x�݂̂œ]�|����̋N���������Ă���̂ŁA�]�|���n�܂��ĉ����������ʁA�]�|�\�z�����藧���ĉ�����n�߂�Ƃ������Ԃ����т��є������Ă���B���̏����p���̓K�������s���A�p���x�N�������ł����������オ��Ǝv���B�@�ł��A�p���N���̃��[�h���K�v�Ȃ̂ŁA�]�|���J�n���Ă���p���x�N���ł̓]�|����Ƃ������Ƃ͂��肦�Ȃ��Ȃ�B�@�܂�����ł��J�n�p���̓K������܂荞��ł��������������悤�Ȋ������ȁB�@���̂ЂƂł������O���b�v�̊m�ۂɂ����ʂ����҂ł��邵�B
���U���P�S����
�M���i�܂��A�p���N���̓]�|�����s�̔���v���O��������������Ȃ������B
���̑O�i�Ƃ��ẮA�u�d�̓I�t�Z�b�g�̓|���U�q�O���ւ̔��f�v�͂ł����B
���܂܂ł͏d�̓I�t�Z�b�g�l�͕�l�Ƃ����ʒu�Â��ɂ��Ă����B�d�S�_�̋O���v�Z�̒i�K�ł̓I�t�Z�b�g�͂Ȃ��̏�ԂŌv�Z���āA���̌�ɃI�t�Z�b�g�l���v���X����Ƃ����J�^�`�ɂ��Ă����B
�X�����p������̕��s����J�n���s�����Ƃ���Ɖ����g�p���̃I�t�Z�b�g�p�����[�^���g�����A�d�S�p�����[�^���g�����Ȃ̂����A�d�S�I�t�Z�b�g���K���낤�Ɣ��f���ċO���v�Z�ɑg�ݍ��ނ��Ƃɂ����B
�ŁA����͉����g�p���ڍs����S�̂ɔ��f���邱�ƂƂ��āA�ʏ���s�̍ۂ̃R�[�f�B���O���C�������B�Ȃ����s�����肵���悤�Ɋ�����̂͋C�̂������낤���H
���̏�ԂŊp���x�N���̓]�|�����s�������Ă݂�ƁA���������オ�����悤�ȁE�E�E�@������C�̂������ȁ[�B�@�@�܂��܂����s���������ł��B
���̂܂܁A�]�|���胋�[�`���Ɏp���ɂ�锻��̋L�q��lj����悤�Ƃ����̂����A�]�|���s��̃E�F�C�g�̍l�������ǂ����邩�H�Ȃ�ĕ����ł܂����Ă��܂��ăR�[�f�B���O�̐i�����͂��������Ȃ��B�����͂��������C�ɓ����ĐQ�悤���ȁB
�����`�A�\���������~�܂����܂܂Ȃ̂����A�y���ɍH��ł���낤���H�@������镔�i�͂��܂葽���͂Ȃ��̂łȂ�Ƃ��������ȁ[�B
���U���P�U����
�����͈���p���N���̓]�|�����s�Ɗi�����Ă����B�@���ʂ͔s�k�B
�ŏ��A�ǂ����悤���Ȃ����炢�������ȓ������J��Ԃ��Ă����̂����A�����ǂ���̕ϐ��̏������~�X�������B���ā`�A����ł��܂��s���͂����Ǝv�����̂����A�����x�Z���T�[�ɂ��p������s�J�n�p���֔��f����悤�ɂ�����p���x�N���̓]�|�����s�����������Ȃ肾�����B���͑��x�Ɣ��Ε����֑����o�����Ƃ������Ȃ����̂��B
���nj����́A�X���ɂ��d�S�_�̈ړ����A�]�|�����s�ɂ��ړ��̌��E�ʒu���Ă��܂��A���~�b�^�[�R�[�h�ɂ�蔽�Ε����ւ̈ړ��ɂȂ��Ă��܂��Ƃ������e���Ȃ��́B
���̑��A�I�[�o�[�V���[�g�ɂ��]�|�̃P�[�X�����܂��s���̂́A�p���x���������Ă������߁A�p�������p����������ɂȂ��Ă���i�K�œ]�|�\�����x�ɒB���Ă��܂��A�����o���n�߂邩��ŁA�܂����̉\�����Ⴍ�Ȃ��Ă������炾�����B
�ǂ����A�܂��p���f�����邽�߂̌����E�l�@������Ă��Ȃ��悤���B
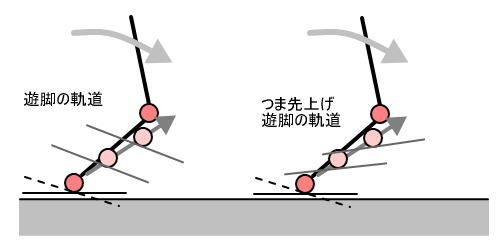
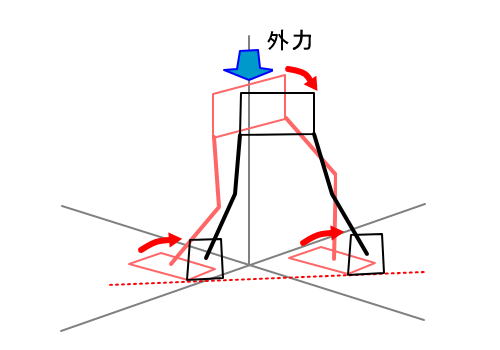
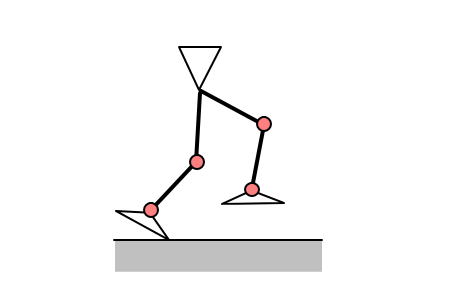
���́A�P�R���̃C���X�g�ɂ���悤�Ȍ��E�p�x���v�Z���A����������_�œ]�|������n�܂�̂����A���ꂾ�ƁA10deg���炢�ɂȂ�B����ƁA�O�̂߂�߂��Ă��܂������Ȃ��̂��B臒l��������ƁA������Ƃł��X���ƃo�V�o�V�����o���܂����Ă��܂��Ȃ����A�W���C���t�B�[�h�o�b�N�ɂ��u����v�Ƃ̗Z�������܂��s���Ȃ��B
�p�����v�Z�ɓ��ꂽ�r�[�Ɂu�]�|�i�����]�|���˂Ƃ����Ӗ��Łj�v�̔�������Ȃ���Ȃ�Ȃ��킯���B���������A���́@�u�p���x�ɂ�锻��v�ˁu�p���ɂ�锻��v�ˁu�]�|����v�Ƃ������Ԃ������B�u�]�|����v���擪�Ȃ̂��[�B
���ƁA���o�I�Ȋ��z�Ȃ̂����A�O�͂ɂ��X���Ă���Ƃ��͑��̉��ŗ����Ă���̂����A�p���N���ł̓]�|������J�n�����ƁA�p����ǂݎ���ď��ʂɃO���b�v����悤�ɑ����y�^���Ɖ��낵���p���ɂȂ�i�P�S���C���X�g�Q�Ɓj���ꂪ���s�̌����̂悤���B�ܐ���グ���܂܂ŕ��s�J�n�������������̂��H����Ȃ��Ƃł���̂��H�߂̏ꍇ�͂ނ肾��ȁ[�B�V�r���オ������P�_�ŗ����Ȃ���Ȃ�Ȃ��Ȃ�B�U�q��������ł���̂����H
���U���P�V����
����̌㔼�͍����̂��߂ɍ\������������Ă����B�Ȃ�Ƃ��A�W�J�f�[�^��ʕt������Ƃ���܂ŏI������̂����A�����͂��̑�������B
�ł��A��镗�C�ɓ��������_�ŁA�����̍H��ł͋Ȃ���Ȃ������B�C�������̂����A�X�ɋȂ���Ȃ��������Ă��܂����B�v�ύX�Ƒ��ɖ��͂Ȃ������`�F�b�N�B�B�B
����̓A�����J����l�A�������V���[���u���[�L�ŏ��߂Ĕ��Ȃ����s���̂����A���܂ł̎�����Ȃ��@�ł͂ł��Ȃ�����Z�Ȃ����ł���悤�ɂȂ����̂ŁA���\���R�ɔ����i��v���Ă����̂��B
������͋Ȃ���܂���B
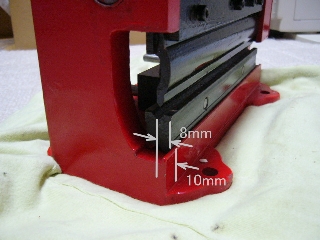
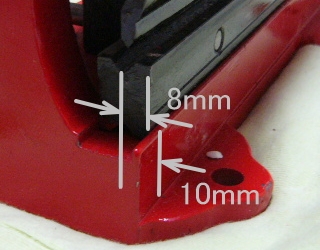
 �@���̃x�[�X
�@���̃x�[�X
������ȕ��ɂ��Ȃ��ƋȂ���Ȃ��B
 �@�@�J�^�`�͂���������ƕύX�������܂����B������Ǝア�Ƃ��낪�C�ɂȂ����̂ŁB�B
�@�@�J�^�`�͂���������ƕύX�������܂����B������Ǝア�Ƃ��낪�C�ɂȂ����̂ŁB�B
��������������B���A����͂�����Ă�����Ⴄ����B
 �@LAN�J�[�h�Œ����
�@LAN�J�[�h�Œ����
�|�C���g�́��@���̃��Q���̌�����Z�Ȃ��̍ŏ����@�����߂�̂����A���̃x�[�X�̏ꍇ�͎�O�ɋȂ����Ă��镔���������ɂЂ��������Ă��܂��̂��B
 �@�@���������i�Ȃ�[�������g���Ό��\���낢��ȕ��i������̂����ǂȁB
�@�@���������i�Ȃ�[�������g���Ό��\���낢��ȕ��i������̂����ǂȁB
 �@�@�悭�����Ȃ��̂ł��������g��B
�@�@�悭�����Ȃ��̂ł��������g��B
���ǁA�������܂ł����ł��Ȃ������B��o���E���X���d�グ�E�Ȃ��@�͗��T�Ɏ����z���B
�]�|�����s�͍s���l�܂芴���Z���ɂȂ��Ă����B
�ܐ�œ�����Ă����Ԃ̂܂܁A�]�|�����s�֎������ޕK�v������悤�Ȃ̂����A����̌`���l����Ƃ��܂��s���Ȃ������B�@���̍\�����ς���K�v������̂����m��Ȃ��B�������Ă݂����Ƃ��낾���A����p������s���[�`���ɐ܂荞�ތ��������Ȃ���Ȃ�Ȃ����A�������������ڂ��o��܂ōl�@���Ă݂悤���Ǝv���Ă���B�Ƃ肠�����͎p�����������Ă݂āA�ȒP�ɂł������Ȃ�Ύ������ȁB
���U���P�W����
�ܐ旧����Ԃ���̕��s�ɂ��ď����l�����̂����A�ܐ旧���𐳂����T�|�[�g����ɂ͂ܐ�߁i���̎w�߁j���K�v�ŁA����ɂ͎߂̋Z�p���K�v�B����͐�X���s���l���鎞�ɂ͕K�{�Ȃ̂����A���͂܂����������B����̃n�[�h�łł�����@���l���˂Ȃ�܂��B
�����_�炩��������A�����̃N�b�V���������炩�����邱�Ƃł�����x�͎߂ɋ߂����Ƃ��ł��邩�Ƃ͎v�����A�ʂ̎�i���l���Ă݂悤�B
�������낦�ė����Ă���Ƃ�����Ԃ͂����Ƃ��āA����ȊO�̏�Ԃ����}�̂悤�ȏ�ԂƂ����B�@������Ƃ킩��ɂ������A�O�͂͌����������炱����Ɍ������Ă������Ă��邱�Ƃ��C���[�W���Ă���B���̎��̓]�|���͐Ԃ��j���B�@���m�ɂ͊O�͂̂����A�]�|���ɒ�������͂��]�|�O�͂Ƃ��ē����ƌ����������������B
���̎��Ԃɑ��āA���}�̂悤�Ɏp����ύX���A�]�|�O�͂���p�����K������B�@����͊O�͂��傫���ꍇ��Ђ��������O�͂ɑ��čs������ŁA�O�͂��ׂĂɔ�������킯�ł͂Ȃ��B�@���ʂ͍��܂łǂ���p����ύX�����ɑΉ�����B�@�O�͂��Ă����Ԃł͓]�|���ɐڂ���Q�_�݂̂œ�����Ă����ԂȂ̂ŁA�p���ύX�ɂ��X���b�v�͂����Ȃ��Ă�������Ȃ����Ǝv���B
���̎p���Ȃ�A�ܐ旧���ł����̕ӂŎ�킯�ŁA�O���b�v��������x���҂ł���B���R�p������̓]�|�����s���͈��肵�đ��ݏo����̂ł͂Ȃ����ȁ[�Ǝv���B
���̐�͂ܐ旧����Ԃ���̕��s�Ƃ������ƂŁA�܂��p�����[�^�������鎖�ɂȂ�ȁ[�B�@�ܐ旧���́A�H�ʂ̌X�Ƃ����`�łh�j�ɑg�ݍ��ݍς݂Ȃ̂ŁA���e�����v�Z�ɔ��f�����������������C���v�������g���̂͊ȒP���낤�B�����A�V�r���A�^�����Y�݂ǂ���ɂȂ�̂ł͂Ȃ����낤���B�i�����ł��Ȃ����ȁ[�H�H�j
���U���Q�O����
�ܐ旧���p���̃f�[�^�����������Ă����̂����A��͂����B
�Ȃ�ƌ����Ă������Ƃ������ł��グ���u�ԂɎw�����p�`���ς��A��̂͏d�S�_���w�����p�`�̊O�ɏo�Ă��܂����Ƃ��B�ܐ旧������ɂ͂܂��A�d�S���w�����p�`�̒[�Ɉړ������A���ꂩ�炩���Ƃ��グ��Ƃ����菇���K�v�B
�����g�p���Ƃ��Ă͏d�S�_�̊Ǘ������Ȃ���Ȃ�Ȃ��̂����A�u�ԓI�Ɉړ�����d�S�ʒu�i���ΓI�ɁA�ł͂��邪�j���ǂ��t�H���[���邩������B�����Ƃ��グ�邽�߂̃v���Z�X�Ƃ��������̂��K�v�ɂȂ�̂����B�B
�����g�p���̒��łܐ旧���̎p���ɐ�����݂���ׂ����ǂ������Y�܂����B���E�̑����ɘH�ʂ̌X����������Ύ��R�x�͏オ�邪�A���肦�Ȃ��悤�Ȏp����\�����邽�߂ɒʏ�̂قƂ�ǂ̓���̂��߂̏����𑝂₷���Ă̂��ǂ����ȁ[�ƍl���Ă��܂��ĂȂ��Ȃ��܂Ƃ܂�Ȃ��B
�ܐ旧�������1�����ł����Ƃ��āA�w���r��1����͂ܐ���~�낷�ׂ����낤���H����1���ō~�낷�ׂ����낤���w���r�͂ܐ旧���̂܂܂̕����悳���Ȃ̂����A�Q���őΉ�����K�v������A�X�ɕ~�����オ��悤�ȋC�����Č��߂������B
�܁[�A����Ȃ���ȂŔY�݂͐s���Ȃ��̂����A�����̓T�[�{�̉��ǂɂ��đo�t�d�q�֓n����������邽�߂̃v���O�������ƃe�X�g�������Ȃ��Ă����B
���܁A�����_�̓R�}���h�^�T�[�{��PWM�T�[�{�̂悤�ɒ莞�����Ŋp�x�w����^����Ƃ�������������Ȃ��Ă���B�������APWM�T�[�{�ł͂Ȃ��̂Ŋp�x�ω����Ȃ��Ƃ��̓R�}���h�͑���Ȃ��B
�����A���ꂾ�Ƃǂ����g���N���ڌ��肷��悤�Ȃ̂��B�����ł����g���N�s���Ȃ̂ɂ�߂���B��r�I�Z�����ԂŎ��ԕt���f�[�^�𑗂�ƁA���x�͒ǐ����������Ȃ��Ă��܂��B�g���N���X�ɗ�����悤�Ȃ̂��B���̕ӂ�̏���������������Ă����B
��́A���j�A�Ȋp�x�ω��ŃT�[�{�����邱�ƂȂǂقƂ�ǂȂ��̂ɂ��̃P�[�X�ł������\�������ł��Ȃ����{�b�g�p�T�[�{���Ăǂ��Ȃ낤�Ȃ��B
�o�t�d�q�̂����Ɋ��҂������I
���U���Q�P����
�����g�p���Ɂu�H�ʂ̌X�v��g�ݍ��ނƂ���ƁA���}�̂悤�ɂȂ�B
�H�ʂɂ����낢�날�邪�A�̌n���Ăčl����ƂȂ�Ƃ���ȂƂ����Ǝv���B
�����A����肽���͎̂Ζʂ�������Ƃł͂Ȃ��̂ŁA���̐}�̂悤�ȏ�Ԃ��\�����Ȃ���Ȃ�Ȃ��B
�Ƃ������ƂŁA�\�����@�͊e�����Ƃɑ����̌X�������p�����[�^���������邱�ƂɂȂ�B
�p���S�̂��l����ƁA���̐}�̂悤�Ȃ��ƂɂȂ�B
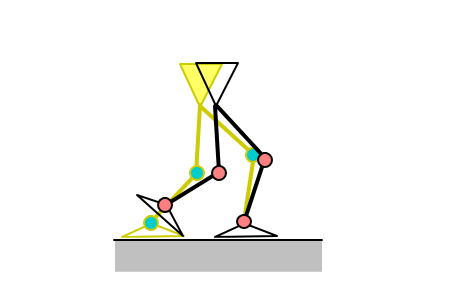
�ܐ旧�����Ă��Ȃ���Ԃ��炩���Ƃ��グ���r�[�ɁA�d�S�̊�{�ʒu���ς��B�グ��p�x�ɂ���ď��X�ɕς��Ȃ�l���₷���̂����A���l�タ����Ƃł������Ƃ��オ������d�S�ʒu���Y�o�b�ƕς���Ă��܂��̂��B����A�ǂ�����ď������悤���ȁ[�B���܂܂ł͂Ȃ��Ƃ����Ă����`���삾�����̂ɔ���`����ɂȂ��Ă��܂��B
�@��ɏd�S�ʒu���V�t�g���Ă����Ă��炩���Ƃ��グ��B
�A�����Ƃ��グ��ɔ����čŏI�I�ȏd�S�ʒu�փV�t�g����B
�A�͏������ȒP�Ȃ̂����A�����Əグ�p�x���������ꍇ�͂��܂��Ȃ��̂ŁA��͂�@�B�@���ʐl�Ԃ̓���͇@���ˁB
���Ƃ������l���������߂Ă����Ȃ���Ȃ�Ȃ����Ƃ�����̂����A�ׂ��Ȃ��ƂȂ̂ŏȗ��B�@�ȏ�̂��Ƃ�z�����Ăܐ�グ�̃��f�����ɒ��肵�悤�B
���U���Q�R����
�����͐�T�̑����Ŕ��H��B
����������͉����o���Ȃ��̂ŁA�P�O�����炢�܂ł̓v���O�����B
���܂ō��W�ϊ��͎O�p���ɓW�J���Ă����̂����A��]�s��ɂ��v�Z�̓N���X�����ċL�q��������������ȁ[�ƍ��X�Ȃ���N���X�������肵�Ă��B
�ŁA�[���܂Ŕ���������̂����A�A�@�@�@�@�����͂����s�k���ł����ς��ł��B(T_T)
�V�����㔼�g�t���[���͔�1.5�~���ŋȂ��̒�������Ԓ����Ƃ����90�~�����炢����B���쑍�w�����܂�Ȃ��@�ł�100�~�����̋Ȃ�������ƞw�����������ł��܂����܂��Ȃ���Ȃ������B���Ȃ����͂����܂�Ȃ��@�͂����͂��Ȃ����낤���A���o�[���Ȃ̂ł˂����̎���Ȃ��@�ɔ�ׂ�ƃp���[�̖ʂł͗�邾�낤�Ǝv���A�ǂꂭ�炢�܂ł̋Ȃ��\�͂�����̂����O�Ɋm�F����K�v������B
�ŁA�ǂꂭ�炢�Ȃ���̂����e�X�g����e�X�g�s�[�X��������B70�~���`100�~��
 �@�@�@�@
�@�@�@�@ �@�Ȃ��Ă݂�B
�@�Ȃ��Ă݂�B
���ʂ͂���B

70�~�����܂Ƃ��ɋȂ���Ȃ��B80�~���͂��߁B�@����Ȃ��@����80�~���͂��ꂢ�ɋȂ����Ă��ˁ[�B
�܂��d�����Ȃ��B���o�[�������炠����x�͗\�z���Ă����B����ɂ��Ă��Ȃ�Ƃ��Ȃ��@�̓��������������B80�~�����Ȃ��鎞�ɑS�̏d�����������炨�������Ȃ������H���������肵�ăK�`���K�`������Ă��烌�o�[���������������Ɖ��悤�ɂȂ����B�i�܂������s�R�����j�s�p�Ȃ��܂łł���悤�ɂȂ������B��`�A���������ăX�g�b�p�[������������ȁ[�H�܂Ƃ��ȓ������ǂꂩ�킩���Ȃ��킩���B
���P�D�T�~����60�~���܂ł����Ȃ���Ȃ����̂Ƃ��Đv���������B60�~���ȏ�̕����͋Ȃ����Ɍ����J���ĉ��͂��y���B�@���̎�@�͎�肽���Ȃ������̂����A�d�����Ȃ��B
���ā[�A��o�������ȂƎv������A�A�A����H�o�b�e���[�J�o�[����1.5�~���ɖʕt������Ă�H�H���������ȁ[�Ǝv���Ċm�F����Ɛv��1.2�~���ł���Ă��B�����ԈႦ���`����������������܂ł�����������A���ʍ�Ƃ������ȁ[�B���������Ȃ��̂�1.2�~���ō�蒼�����B1.5�~�����ő�60�~�����x�Ȃ�1.2�~���Ȃ�100�~�����炢�͂������ȁ[�Ɣ�Z�p�ŁA�o�b�e���[�J�o�[��95�~�������Ȃ��Ă݂邱�Ƃɂ���B
�ŁAZ�Ȃ������ŋ����̎����ɒ��ʁB�@Z�Ȃ����@�����B�B�B�@���[�[�[��B�@�J���y�L�Ƀ`�F�b�N�R��ł��Borz �Ȃ����˂��A�Ȃ����˂��ł��B����ɂ͓����������_�C����R����Y��ɋȂ���Ȃ��B�@����̐v�͂����蔼���ŋC���������ĂȂ��C�����Ă����̂����A�Ђlj߂���B
 �@�ǂ����悤���Ȃ��̂Ń��P�ɂȂ��Ăނ���Ȃ��Ă݂��B�ނ��Ⴍ����f�X�B
�@�ǂ����悤���Ȃ��̂Ń��P�ɂȂ��Ăނ���Ȃ��Ă݂��B�ނ��Ⴍ����f�X�B
�ނ����`�A�{�f�B�[�t���[�����Ȃ���̂��|���B�B�B
�o�b�e���[�J�o�[�͐v���C�ɓ���Ȃ��̂ŁA�v���������܂��B�˂��S�{�~�߂��Ă͎̂���I����Ȃ�����ˁB�o�b�e���[�����̎�Ԃ������肷���B
���U���Q�S����
�����͌ߑO���Ƀ}���V�����̗�����̑������B�ŋ߂͏o�Ȃ��Ă��Ȃ������̂����A�ė��N�͂܂�����������Ă���̂ł��낻��o�Ȃ��Ď�����F�����Ă����Ȃ���Ȃ��B�@10������n�܂���1���Ԃ��炢�ŏI��邩�ȁ[�Ǝv������ӊO�Ɛ���オ���āA�I������̂�12���������B
������H�ׂāA�ߌォ��͍���̑����B�����̏o���o����Ƃ͍���I��点���̂ŁA�i�o�b�e���[�����͍Đv�Ȃ̂ŁA�v�������o���Ȃ���Ȃ�Ȃ����j�����̓��X���d�グ�ƋȂ��B
�ǂ����A���Ŕ��܂�Ȃ��@�̓_���ł��ˁB���������������̌��E�e�X�g�ʼnĂ��܂����̂����B���̂��镔�i�͂��܂��Ȃ���Ȃ��̂Ŏ���܂�Ȃ��@�ƕ��p���܂����B����ł�������ł��Ȃ��v�ɂȂ��Ă�̂łǂ�����g��Ȃ���Ȃ�Ȃ��Ȃ��ė]�v��Ԃ��������Ă邩���B���������i�͊T�ˑ��v�B���o�[��������ȒP�ɋȂ����Ă܂��ǂ��B�@�܂�Ȃ��@�̋��������������̂ɂ��ẮA��x�������ĉ����ǂ��Ȃ��Ă�̂����ׂČ��Ȃ���Ȃ�Ȃ��ȁ[�B
�Ȃ��ǂ������Ȃ�����Ȃ�Ƃ��t���[�����������܂����B�����g�x�[�X�t���[���Ə㔼�g�x�[�X�t���[���̘A���\���Ɂi���x�I�Ɂj�C���g�����v�������̂�����ǁA���̐��쐸�x�������đg�ݗ��Ă�̂���ςł����B
�Ō��CPU���j�b�g�����t���悤�Ƃ��āA�ꃖ���Ȃ�����ɍ�荞�܂Ȃ���Ȃ�Ȃ������������̂�Y��Ă����B�@�ӂނ��`�A��������̂͂�������Ȃ̂ŃX�y�[�T�[�����ē����邱�ƂɁB�B�@
 �@�@�@
�@�@�@
�ȑO���瓪���j�b�g�͎��t���Ȃ��œ������Ă����̂�����ǁA�㔼�g���̃T�[�{���[�^�[���A�^�}���ۂ������Ă����̂Ŋ����̂��ۂ������̂����A����͂��̕ӂ肪��������폜���ꂽ�����Ŗ{���ɃA�^�}���Ȃ������ɂȂ����B�i�{���ɃA�^�}���Ȃ��̂�����ǁB�B�j
�E�͎��O�������̂̂Q�������B�����Ƃ�����x�Ǝg�����Ƃ͂Ȃ��̂�����ǁA�厖�ɂ����Ă������B
�V�����_�t���[���ɂ�LED�ƃ}�C�N����������Ă��Ȃ��B�}�C�N��LED�����{�J�b�v�ɂ͕K�v�Ȃ����ǁA�A�A����ALED�͏�ԕ\���p�ɂ͂ق������ȁB�}�C�N�͌�������B
����ŁA�̏d�͏����y���Ȃ�A�d�S�͏����Ⴍ�Ȃ�A�㔼�g�̍������������������͂��B���s�ɂ͂������������Ȃ��̂����班���̓V���L���ƕ����悤�ɂȂ��Ă���悧�`�B
�T�[�{�̔z�����ł��Ă��Ȃ����ACPU�̎��t�����s�\���Ȃ̂ł܂����炭�͓��������Ƃ��ł��Ȃ��̂��B���i�����ɏH�t���s���Ȃ���B
���U���Q�T����
CPU���j�b�g�̌Œ�△��LAN�J�[�h�̌Œ肪�K���Ȃ̂ł͂��邪�A�Ƃɂ������ɂ��������Ă݂悤�Ƃ������ƂŁA�������Ă݂��B
����̓T�[�{ID1��2�����Ă����Ă������̂�2�����폜�ƂȂ����̂ŁA�S�T�[�{��ID�����������B�v���O�����I�ɂ��z��̃A�h���X��ID�������N�����Ă��܂��Ă���Ƃ��낪�����āA������ID�͊���t���ɂȂ��Ă���B�ǂ��Ȃ��L�q�Ȃ̂����A����͂��̂܂܂ɂ���ID��U��Ȃ������B
�Ҋ߂̉ғ��͈͂��L�������̂����A�������ŌҊ߃T�[�{�̊p�x�ݒ�ɃI�t�Z�b�g��ݒ肵�Ȃ���Ȃ�Ȃ��Ȃ����B�@�ŁA�I�t�Z�b�g�l�����̂����A����ɍ��킹�ĉғ��ő�p�x�ŏ��p�x�̐ݒ���C�����Ȃ���Ȃ�Ȃ��B�@�����ł��܂��ǂ��Ȃ��v���O�����B�@�_���p�x�ōő�ŏ���ݒ�ł���I�t�Z�b�g���ς���Ă��L�q��ς��Ȃ��Ă����͂��Ȃ̂ɁA��Ίp�x�ŋL�q����悤�ɂ��Ă��邽�߁A�I�t�Z�b�g�l�ɍ��킹�ďC�����Ȃ���Ȃ�Ȃ��B�@�܂��A�I�t�Z�b�g��ύX���邱�Ƃ��������т��т���킯�ł͂Ȃ����A��r�I�ȒP�ɏC���ł���̂ŁA�_���p�x�ŋL�q����悤�ɕύX�����B�X�b�L���i*^_^*�j
���낢��Œ肪�s�\���Ȃ̂ŁA��������킯�ɂ͍s���Ȃ��̂����A�������Ă݂��B
�������y���B������Ɨ͋��������B�ł������ς�����Ȃ��B�d�S�ʒu���ς��������܁[���R���ȁ[�B���m��������������Ȃ��Ȃ����肷��̂͂����������̂ł������������ω��ɂ��Ή��ł���悤�ɂ��Ă����Ȃ���ȁ[�B�@�ŁA���s�̕��͏d�S�����ݒ�l��ύX���邱�Ƃł܂�������悤�ɂȂ�܂����B�܂����������v�肻�������ǁA���������Ƃ���͌v�Z�ŕ��e������Ă��鋭�݂ł��ˁB�@���[�V�����f�[�^�ŕ������Ă���ꍇ���ƁA����͂�����ςȂ̂ł͂Ȃ��̂ł��傤���B��������ƂȂ��̂ł킩��Ȃ����ǁA���s���[�V�������̂��đ�ς����B�A�C�{��������Ă����������������ǁA���[�V�����ŕ��s��������̂��č��C�̗v���Ƃ��낤�ȂƎv���B�ڂ��͂�����Ƃ���Ăł��Ȃ��Ă�����߂܂����B�_���g�ݗ��Ă���������Ɗy���ȁ[���Ďv���܂����B
�y�����Ă����Ă��A�o�b�e���[���������j�b�g�����ڂ��Ă��Ȃ��̂Ōy���ē�����O�B�팸�����d�ʕ����炢�͑��ʂ���\�肾���猋�Ǐd�����Ȃ����܂ł̏d���ɖ߂�\��ł��B���Ȃ������͏d���Ȃ�Ȃ��悤�ɂ���낤�B�@�@���O������������I�[�o�[�����ǁB�B�B
���U���Q�V����
�ꃖ���O�ɒ�������RS302CD���͂����B�������x�ꂽ�݂����B�₢���킹����܂ʼn��̉��������Ȃ��̂͂������Ȃ��̂��ȁ[�B
 �@�@
�@�@
�T�N�b��CAD�ŕ`�����̂����A������Ăǂ�����ČŒ肷��̂��ȁ[�B���̃l�W�͎g�������Ȃ��ȁ[�B
�������݂͂ǂ��ɂ��T�[�{�R�}���h���f�ڂ���Ă��Ȃ��悤�ŁARS601CR�Ɠ����悤�ȃR�}���h�`�ԂȂ炢�����ǁA�������[�}�b�v��v���g�R��������Ă����玑�����Ȃ��Ǝg���Ȃ��B�܂��}���Ȃ��̂ł�����Ƒ҂��ăR�}���h�킩��Ȃ��悤�Ȃ�₢���킹�Ă݂悤�B
�A�^�}�v���������ǂȁ[�A�������Ɏ�������炢���̂��킩���悤�ɂȂ��Ă����B
���̂̂Q�����팸�����̂ŁA�T�[�{���Q�]��B�������\���Ƃ��Ďg������Ȃ̂����A�G���_�u���ɂ���Ƃ��A�Ҋ߂��Q�T�[�{�ɂ���Ƃ��A�g�����Ȃ����ȁ[�Ƃ��A���̌`������������������Č��h�����悭���邱�Ƃ͂ł��Ȃ����ȁ[�Ƃ��A���܂�d�v�ł͂Ȃ��Č���CAD�߂č������I����Ă��܂����B������ȁ[�A�������������͑����ƂɋA���Ă����̂Ɏ��Ԃ̖��ʌ������B
���V���P����
���̏T���͂��[�[�[���Ƃܐ旧������̕��s�Ɗi�����Ă܂����B
�i���Ƃ����Ă��قƂ�ǔ]���B�@�ǂ����Ă��R�[�f�B���O�̃C���[�W���ł��Ȃ��č�Ƃ������߂邱�Ƃ��ł��Ȃ������B
�y�j���ɂ͂ܐ旧�����܂߂������g�p���͂ł����̂����A�ܐ旧����ԂƂׂ����̂Ƃ��̏d�S�_�̕ω����z�����邢������v�����Ȃ��ĕ��s�i�������g�p���ڍs�j���ł��Ȃ������B���[�[���ƍl���ĂāA�ǂ�ǂ�Ǝ��Ԃ������߂��Ă������̂�����A���ԂɃT�[�{�̓���e�X�g������Ă݂���A
 �@�T�[�{�̓���e�X�g�̗l�q�B�����_�̔w�����疳���̃T�[�{�����ɂ�낤�ɂ��ƁB�B�B
�@�T�[�{�̓���e�X�g�̗l�q�B�����_�̔w�����疳���̃T�[�{�����ɂ�낤�ɂ��ƁB�B�B
�����ƋC�ɂȂ��Ă����l�W���ڐG���镔�����Ă݂���A�d�������ꂸ�Ƀ����_�𗧂����Ă݂���A
 �@�������I�����_���������I�@�@��������ƃo�����X�����悤�Ɏv���̂����A��͂���ɏd�S������Ă�B
�@�������I�����_���������I�@�@��������ƃo�����X�����悤�Ɏv���̂����A��͂���ɏd�S������Ă�B
�������ɍs���Ă݂���i�ӂ��Ɣ������ɍs������o�[�Q���������B�o�[�Q���͂킳�킳���Ă�̂ŃL���C�B�@�ł����������Ă悩�����j
�ł����A��قǂƂ��Ƃ��ܐ旧������̕��s�̃R�[�f�B���O���������āA�ǂ���炿���Ɠ����Ă���悤�ł��B
�ܐ旧������ׂ����ցA�܂��͂��̋t�ցA�Ƃ����ڍs�͍��̂Ƃ���V�r�ł����ł��܂���B�w���r���ܐ旧������ׂ����ɂȂ�Ƃ������ȓ���ɂȂ��Ă��܂��܂��B�g�����ǂ����͕ʂɂ��āA������܂荞�݂����ȂƂ͎v���Ă���̂ł����A�w���r�̐ڒn�_���ړ��i���[�v�Ƃ����������������j����̂͋��e���������Ȃ��B���[�v���镪��������ŗV�r�̒��n�_�����߂Ȃ���Ȃ�Ȃ��킯���ȁB�ӂށB�B�B�B
����œ]�|����̐��������オ��悢�̂����E�E
�ܐ旧���ł̕��s�̃v���O�����Ɏ�Ԏ�����̂́A�܂�����łܐ���グ�Ȃ���V�r���A������A�V�r�����葫�̎��ɂܐ旧���ɂȂ����肷����s���T�|�[�g�ł���悤�ȃv���O�����\���ɂ��Ă���������������ł��B�@�z���g�A���s�����Ń��V�����t�ł��H�ׂꂿ�Ⴄ�B���낻��]�|����������Ȃ̂œ]�|�g�◧���オ��̂��Ƃ��l���Ȃ���Ȃ�Ȃ������ɂȂ��Ă����B�����オ����Ăǂ���낤���ȁ[�ƃ����_�����Ȃ���l���Ă����̂����A�l���p���Ƃ��n�C�n�C����̗����オ��Ƃ��A�ʔ��������ȂƎv���Ă��܂����B���[�V�����łł��邱�Ƃ��[������Ă��d���Ȃ����Ă������A�����オ�蓮�삾���l���Ă��܂����V�����t���H�ׂꂿ�Ⴄ���炢�������ɂ��Ȃ��ƂȁB
���V���Q����
�ܐ旧����Ԃ���̂P���Ɋւ��Ă��낢��e�X�g�B
�v�f�ł́@�@�ˇA�@�܂��́@�@�ˇA�ˇB�@�œ]�|������������Ȃ��ƍl���Ă����̂����A
 �@�@�@�����ܐ旧���B�@�]�|�����s�ł͂܂����������Ă��̂ɉ�����ē|�ꂩ���̏�Ԃ�z�肵�Ă���B
�@�@�@�����ܐ旧���B�@�]�|�����s�ł͂܂����������Ă��̂ɉ�����ē|�ꂩ���̏�Ԃ�z�肵�Ă���B
 �@�A�@�O�ɏo�������ׂ͂����B�@�c���Ă��鑫�i���̏ꍇ�͌�둫�j�͂ܐ旧���B
�@�A�@�O�ɏo�������ׂ͂����B�@�c���Ă��鑫�i���̏ꍇ�͌�둫�j�͂ܐ旧���B
 �@�B�@�X�Ɏc���Ă�����둫���O�ɏo���āA�ׂ����ɁB
�@�B�@�X�Ɏc���Ă�����둫���O�ɏo���āA�ׂ����ɁB
�ŏ��̂P���͂Ȃ��Ȃ�����B�@�A�ˇB�͌��\���肵�Ă���̂����A�A�̏�Ԃŗ����Ă���̂�����̂ŁA�s����ȓ����̌�ɇA��ԂƂ����͍̂l���ɂ����B�����ŁA
 �@�C�@�P���ň�C�ɗ������ׂ����ɁB
�@�C�@�P���ň�C�ɗ������ׂ����ɁB
���ꂪ�Ȃ��Ȃ����������������B��������������A�x���r���ܐ旧������ׂ����ɂȂ�ƕ��s�v�Z��̌��_���������ƂɂȂ�̂œ��������������Ȃ�B�v���O�����͍X�ɉ��ǂ���K�v�����邪�A�W���C���t�B�[�h�o�b�N�ƕ��p���邱�Ƃŏ����͈��肵���]�|�����s�����҂ł���B����ɉ��ǂ��˂`�B
��肩���Ƃ��Ă�0.1deg�����ܐ旧��������Ƃ�������̂܂܂̃v���O�����̂܂܂ł��������ȓ����͂��Ȃ��̂����A��͂肿���Ƃ������ȁ[�B
RS302CD�̎戵���������o�t�d�q�H�Ƃ̃z�[���y�[�W�Ɍf�ڂ���Ă����B�悩�����悩�����B�R�}���h�́A�ق�RS601CR�ƕς��Ȃ��悤���B�������Ă݂����ȁB�d�����Ȃ���B���A�R�l�N�^���Ă����Ȃ��ƁB
�����̐v����͂܂���ɂȂ肻���Ȃ̂����A�H��n�͑O�|����������������������Ȃ��ȁB�^�~�ɊO�ł̍�Ƃ̓L�c�C���B�����A�^�}�����Ă݂������B
���V���S����
�x���r���ܐ旧���̏�Ԃ���P���Ŏx���r���t���b�g�Ɏ����Ă�����悤�ɂȂ����B
�x���r�̎p�����ς����Ă��Ƃ́A���ʂ͂���Ȋ������Ȃ̂����A
����Ȋ������ɂȂ�Ƃ������ƁB
�w���_�͂ܐ旧���̐ڒn�_�Ƃ���̂����ǁA�^�[�Q�b�g�p���łׂ͂����ɂȂ�̂Ŋ�_���ς��B�����ł̏����Ɉ�H�v����̂��B�@�ǂ�ǂ�Ɣ��Ǖs�\�ȃR�[�h�ɂȂ��Ă����ȁB���̓����ƃ\�[�X�̃R�����g����������ɂȂ�͂��B�������菑������ł������B
�����̎����ւ̃���
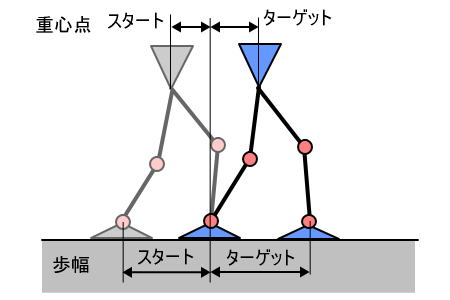
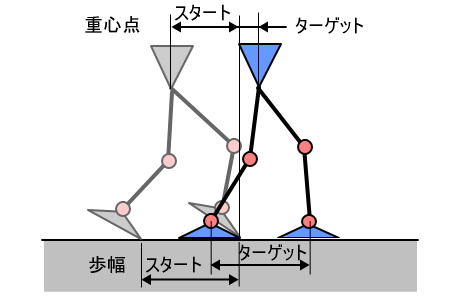
�E�|���U�q�̌��_�͂ܐ�Ƃ��āA�X�^�[�g���W�ƃ^�[�Q�b�g���W�����肷��B
�E�����idepth�j�̈ړ��ʂ���͐}�̏d�����������������Ă����B
�E�V�r�̒��n���_�ő��̎p���ύX�������B
�E�d�S�_�̌v�Z�͍Ō�܂łܐ�����_�Ƃ��Čv�Z����̂ŁA�p���ɑg�ݍ��ލۂɂܐ�Ƃׂ��������Ƃ̍��������������B
���������͂ł����̂����A�܂����낢��Ɛ������Ċ����Ƃ͂����Ȃ��B���Ƃ��������݂͑����̃��[���ɂ͑Ή����Ă��Ȃ��̂ŁA�������{�b�g�̐i�s�����Ɍ����Ă��邱�Ƃ�O��Ƃ����v���O�����ɂȂ��Ă���B�g�����ǂ����͕ʂɂ��āA���[�����C�ӂ̊p�x�ɂ���Ƃ��ł�����ɓ����悤�ɂ͂��Ă��������B
������Ɠ������Ă݂��̂����A�x���r���ܐ旧���ɂ����܂܂̎����͈��肵�Ă���B�����]�|�����s�ɑg�ݍ��߂ł��邱�Ƃ͂قڑS����������ƂɂȂ�ȁ[�B���ǂ͑S������ȂȁB
�V�����_�A�@���̂̎����Ȃ������̂œ��̂̍����͊i�i�ɏオ�����͂��B�@���Ȃ����܂ł͂�����ƁA�u�O�V���[�v���Ċ����������̂����A���͂�����Ɓu�ǁ[��v���Ċ����B�@�g���������B(T_T)
���͂Ƃ��Ƃ��]�|�����s�ւ̑g�ݍ��݂��B�p����X����]�̊������Ȃ��Ƃ�����ȁB
���V���V����
���[���̃T�|�[�g�ƃf�o�b�O�B�����A�o�O�͎�ꂽ�Ǝv���̂����A������������肨�������͂Ȃ����A�ϐ��̓������l���Ă���ʂ�ɓ����Ă���悤�Ɍ�����B�@�Ȃɂ��A���ȑ���̉�ɂȂ��Ă��܂��Ă���̂ŕϐ��̓��������Ă����܂������Ă���̂��ǂ���������Ɣ��f�ł��Ȃ��B�R����������\�[�X�ǂ߂Ȃ��Ȃ��Ȃ����Ǝv���B����A����͌����������B����ȓ���v���O��������Ȃ�����ȁB
������̂ɂ͂����ȑg�ݍ��킹�̐ݒ�������Ă݂Ȃ��Ƃ����Ȃ��̂����A�����Ǝ������͈͂ł͂܂Ƃ��ɓ����Ă������B
���ǁA�x���r���ܐ旧���i������������j����ׂ����ɂȂ�ꍇ���A�ׂ�������ܐ旧���ɂȂ�ꍇ���T�|�[�g�ł����B�������A�������ܐ旧�������������i�܂��͂��̋t�j�Ƃ����ω��̓T�|�[�g���Ă��Ȃ��B
�ł͂ł́A�����]�|�����s�̃��[�`���ɂ��K�p���܂��傤�B�@�@�ƁA�v�����̂����A���ꂪ�Ȃ��Ȃ�����B���ʂ̕��s�̏ꍇ�̓^�[�Q�b�g�p�������܂��Ă���̂ŁA��������t�Z���āA���̏d�S�_�̓��B�_�����߂āA�V�r�����n����u�ԂɃ^�[�Q�b�g�p���ɂ���ւ��āA�A�Ƃ��������̏��������Ă���̂����A�]�|�����s�̏ꍇ�́A�^�[�Q�b�g�p�������܂��ĂȂ��̂ŁA�O�͂Ȃǂ���V�r�̒��n�_�i�Ƃ��A�d�S�_�̓��B�_�j�����߂āA�Ō�Ƀ^�[�Q�b�g�p�������߂�Ƃ��������Ȃ̂��B
�����̏��Ԃ����낢��ƕύX���āA�]�|�����s�̊��ɂ��W�J���邱�Ƃ��ł��܂����B�ق����A�悩�����B
�܂��A�p�����߂ɂȂ������̂ܐ旧����Ԃ���͂��Ă��Ȃ��̂����A�e�X�g���Ă݂邱�ƂɁB�����ɂ͓]�|�����s�ɏI�~����łĂ邩�ȁ[�B
���낻��J�����ɒ��肵�Ȃ��ƂȁB
�̏d���y���Ȃ����������A�]�|�����s�̐��������������Ă�ȁ[�B�ܐ旧���T�|�[�g����K�v�Ȃ����������H�@�܂��A�o�b�e���[�ς�ŁA�J������ς�d���Ȃ邩�炠�܂�Ӗ����Ȃ��̂����B�@������A�����͉̂���ɂȂ����B�P��0.4�b�͂ӂ�ӂ炷��B0.3�b�̕������肵�Ă��銴���B������d�S���ς�����肵�������ŁA����������ƒ���������̂��ȂƎv���Ă�B
 �@�@
�@�@
�����Ԃ�ƑO�ɁA���\����ς����Ƃ��A�P�[�u���̒������s�K���ɂȂ������炻�̂�����蒼�����Ǝv���Ă����̂����A����Ȃ�ɐ���������Ȃ�Ƃ��Ȃ����B�����͍����̕��i�ɃP�[�u���Œ�p�̌���lj����悤�B
���V���W����
���܂������Ă���悤�Ɍ������]�|�����s�͂܂��o�O���c���Ă���悤�ł��B����̃R�[�h�C���Ńo�O��܂荞���A���Ȃ�������c���Ă����o�O���C���ɂ�蔭�o�������͒肩�ł͂Ȃ��̂����ǁA�Ђǂ��o�O�͂Ƃ肠�����ގ��B�@�܂��x���r�̌��胋�[���ɕs��������悤�ŁA�������Ă���ƁA�����˂���Ă���B(�[�[;)
�]�|����Ƃ��Ɏp���𐔒l������]���āA�]�|����i�s�����Ɍ����Ă��邽�߁A�ꌩ�O�������ė����Ă���悤�Ɍ����Ă��p���f�[�^�I�ɂ͎ߑO�ɐi�����Ƃ��Ă���A�Ƃ������Ƃ�����̂����A������ƌ��Ă��킩��Ȃ��B�f�o�b�O�����ɂ����č���A�����ō���Ă����ăA�������ǂˁB
���̌�A���ʂɕ������Ă݂�ƗV�r�O���ɂ��Ȃ������ȂƂ��낪�B�����オ��Ȃ��̂ł��܂������Ȃ��I
�Ȃ��A����̕ύX�ł����Ԃ�ƃo�O���������悤�ł��B���T�̓f�o�b�O���ȁ[(T_T)
���������킯�ł܂��]�|�����s�̗��͑����܂��B������Ȃ���A�J�����ɒ��肷�邱�Ƃɂ��܂��傤�B
�����́A�T�[�{�̃g���N�𑪒�i�Ƃ����̂͌����������ȁj���܂����B�@�T�[�{���������f�[�^�Ŏg���Ă���̂����A���ԃf�[�^���w�肵�Ďg�p����Ƃ��ɔ�ׂăg���N���������Ȃ��Ă���悤�Ȃ̂ŁA���̕ӂ�������悤�Ǝv���B
�����ށA�S�~���Ƃ��ʂ��Ă�ȁB�݂��Ƃ��Ȃ��B
�R�łȂ������d��i�G���j�����̃T�[�{�ň����グ��e�X�g�B�@���ʂƂ��Ă͂�͂莞��������̕��������g���N��������悤�ł��B�v�������͍����Ȃ������ȁB

��������g���N���������ȁB���̂������ƃ��X���傫������A���̌�^����������グ��J�^�`�ɂ��āA�ēx�g���C�B�r�̒���20�Z���`��630�O�����������グ��̂ɐ��������̂�12.6kg�Ecm�@�r���d������A���̕����v�Z������A���15kg�Ecm�ł����B�X�y�b�N��21kg�cm�Ȃ��ǁA����g���N���Ƃ���Ȋ����Ȃ̂��낤���H
���Ȃ݂ɒ�~�g���N����20kg�Ecm�ȏ�͂���܂��ˁB
���V���P�P����
�]�|�����s�̃o�O����̂킩�����B
��̑傫�Ȗ�肪�����āA�܂��ЂƂ͈ȑO�ɋC�Â��Ă������ƂȂ̂����A���x�N���ł̓]�|������s���ꍇ�A���̂Ƃ��̎p�����l�����Ă��Ȃ����ƁB�܂�A���x��������x�ȏ゠��Ύp���ɂ�����炸�ɓ]�|�����s���N�����Ă��܂��B���쑬�x���������邱�Ƃ��炭��]�|�́A���̃��[�h�œ]�|�������̂����A�Ɍ������Ă����ԂŋN�����Ă��܂��Ɩ��Ȃ��ƂɂȂ�B�@�]�|����J�n���̎p���������x�Z���T�[�̃f�[�^�Ŏ�荞�ނ悤�ɂ����Ƃ���A�]�|�����Ƃ͋t�ɌX���Ă���p������]�|������N�����Ă��邱�Ƃ��킩�����B�i��������Ȃ�͕̂K�R�Ȃ̂����j
���ɁA�]�|�����s�̌v����s���ۂɁA���̓f�[�^�̂����A�]�|�Ɋ֗^��������̑��x�̉������i���̃v���O�����ł�5���j����͑��x�Ƃ��Čv�Z���Ă���B�X�ɂ͓��͂ƂȂ�]�|�����̑��x�́A�U�q���o���ɍ����|���������̑��x������Ă���A�]�|����̒��ł����Ƃ����x���������Ȃ鎞�̑��x���g���Ă���B����̓u���[�L�̊T�O���K�v���Ǝv���A�O�͂ɂ�����x�t��������Ƃ��C���[�W���Ėڌ��肳���Ă���̂����A�ꗥ�ł��̂悤�ɂ��Ă��邽�߁A�M���M���]�|����悤�ȑ��x�̏ꍇ�ɂ�5�����������߂ɓ|���U�q�̓]�|���������]���Ă��܂��P�[�X����������\�����������B
��̃P�[�X�����킳��ꍇ�A�]�|���m���̎p�����A�|���U�q�̏d��Ǝx�_�̊W���傫���X���Ă���P�[�X�ŁA�]�|�����s�̌v�Z��̏������������Ƃ����P�[�X���������Ղ��Ȃ�B�@���̂��߁A�����o���������t�]����A�x���r���t�ɂȂ�A�����˂���Ă��܂��Ƃ��������ۂ��������Ă��܂����Ƃ��킩�����B
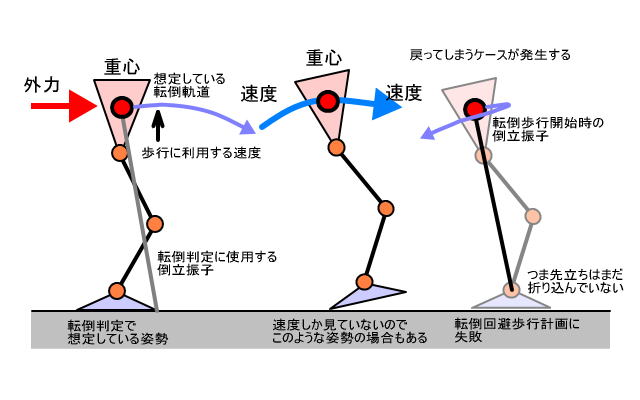
�����b���A�]�|���s�v��ɂ͐܂荞��ł�������x�Z���T�[�ɂ��p����]�|����ł͐܂荞��ł��Ȃ����ƁA����ƁA�������邱�Ƃɂ��|���U�q���s���j�]���邱�Ƃւ̔z���̓���R��Ă����Ƃ������Ƃ��B
�ł́A�ǂ̂悤�ɉ��C���邩�Ƃ������ƂȂ̂����A�]�|�����s�̌��ʂ̖ڕW�p�������]���Ă��܂����ɂ��Ă̓K�[�h���邱�Ƃ��ł���̂����A�]�|���]�̕����ǂ����悤���B
�]�|���莮�ɉ����x�Z���T�[����̎p���f�[�^����荞�ޕK�v������͖̂��������A�ڒn�_���r���ŕς��|���U�q�ƂȂ�̂Ōv�Z�����G���B
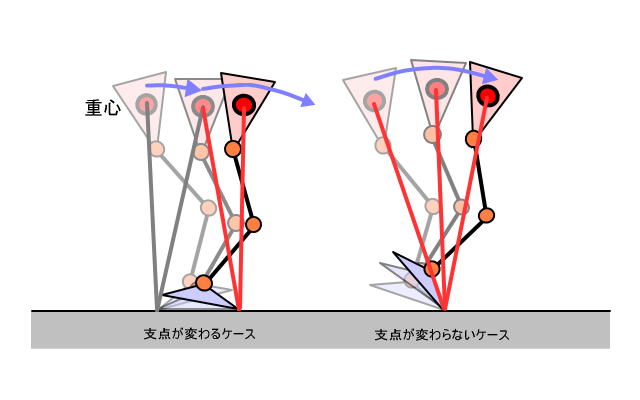
�P�[�X�Ƃ��āA�@�x�_���ς��P�[�X�@�A�x�_���ς��Ȃ��P�[�X�ɕ�������B�@
�@�̏ꍇ�A�x�_����ւ��_�̏d�S�_�̑��x�x�N�g�����v�Z�ł�����Ƃ͏]���̌v�Z�Ŕ���ł���B
�A�̏ꍇ�A�͂��܂܂łǂ���̌v�Z�Ȃ̂����A���̎p���Ƃ��ĘH�ʂ̌X�i���̏ꍇ�͂ܐ旧���A�������j���l������ƕ��G�ɂȂ�B����͌X���p�����[�^�ɓ��ꂽ���ƂŎx�����p�`�̌v�Z�����܂łǂ���ɂ͍s���Ȃ��Ȃ����W�ŁA�x�����p�`��������_�ɂȂ�P�[�X���������邱�Ƃ��ǂ̂悤�ɔz�����ׂ����Ƃ������ƁB
���Ƃ��ƁA�H�ʂ̌X�𑫂̎p���Ɏ�荞�̂́A���́A�X������Ԃ̃R�P�����Ă���r���̎p����\�����邽�߂������̂ŁA�A�̈�ʉ��ɂ��Ă͍l�����Ȃ��ł����܂�Ȃ����낤�B�@�Ȃ�v�Z�ł��������B�R�P�����Ƃ��킩��̂ł���Α��������ǂ��B
���V���P�S����
�]�|�����s���ǂ���������̂��킩��Ȃ��̂ŁA�����̐v�Ƃ��J�����̌����Ƃ������Ă݂�B
���̃J���[CCD�J�����������_�ɓ��ڂ��悤�Ǝv���Ă���̂����A���삪�����̂ŁA�ׂ̃h�A�J�����̒��L�p�����Y�𓋍ڂ��悤�Ǝv���Ă���B�ł��A�����Y�}�E���g�͌a��1�~���Ⴄ�̂Ń}�E���g����H���Ȃ���Ȃ�Ȃ��B�s���g���������ǂ������������B
 �@�@
�@�@ �@�@
�@�@
��p���r����ƁA�@�����J���[CCD���ʂ̃J�����A�E�����L�p�����Y
 �@�@
�@�@ �@�@
�@�@
�����ʒu����B�e���Ă�����ȂɈႤ�B�@��p�ɂ��āA70�x��120�x���炢�̍��B���\�傫�ȍ��B�@�{����150�x�Ƃ�180�x�Ƃ��������L�p�����Y���~���������̂����A�������Čy���Ĉ����̂͌�����Ȃ��̂ł���ł��������ȂƁE�E�E�B���L�p�ɂȂ�Ǝ��ӂ̂Ђ��݂����ɂȂ邩�Ǝv���ĕ�̐������l�����肵�Ă����̂����A���ꂭ�炢�Ȃ����Ȃ��Ă�����������Ȃ��B�n�t�ϊ��Œ������o����Ƃ����Ȃ����܂������ł���B
���āA���܂������Y�̈ڐA���ł��邩�ǂ����B�B�B
�}�E���g�̋K�i�ɂ��Ă�����ƒ��ׂĂ݂�ƁA�{�[�h�J�����Ɏg���Ă���̂̓~�j�����Y�ƌĂ�Ă��āA�}�E���g�̋K�i�̓�12P0.5�ƃ�13P1.0�ɑ�ʂ����݂����ł��B�X�s�[�V�[�Y���{�b�g�ɂɂ��Ă����J�����ƁA�������ă����_�ɍڂ��悤�Ƃ��Ă���J�����̃����Y�̓�12P0.5�A�ŁA���L�p�����Y�̓�13P0.75�Ƃ������̂ł����B���ނނ��A�K�i����̂킩�����̂Ń�12P0.5�̃~�j�����Y�Œ��L�p�����Y��T���Ă݂��Ƃ���A�������݂���܂����B���̉摜��f1.9mm F2.0�Ƃ������L�p�A5800�~��@�����ЂƂ͂�1.78mm F3.0�@6200�~��@�������A�s���g���������ǂ��������B�s���g������Ȃ��ƃS�~������ȁB����Ƃ��낾�B
 �@�@
�@�@
�œ_�����Ɖ�p�̊W�ƎB�e�摜�̔�r���f�ڂ���Ă���y�[�W���������B
��p170�x�͖��͂����A�f�J���d�������̂ɔ�ׂĉ�p150�x�͂��������B4800�~�����A������Ă݂悤���ȁB��1.9mm�̂͂ǂ����������B��r�̃y�[�W�ł����t���s�ɂȂ��Ă邵�A�s���g������Ȃ��悤�ȋC������B
���V���P�T����
�����Y�T���̑���
f1.24mm F2.0�Ƃ����̂��������B�i���̉摜�j9800�~��B�����6200�~�̂�菬������ɉ�p�͂����ƍL���Ǝv����B�ł��A�Љ�Ɂu�قځA360�x�ɋ߂��͈͂��ʂ����߂�B�v�Ƃ������̂����A�����180�x�̌�A�ł��ˁB��u�u�����A�������I�v�Ǝv���Ă��܂����B�@�������Ƃ����Ă��\���ł����Ē����A�y���Ƃ����Ă�����̂Ɣ�ׂ�2g�y�����x�B180�x�̎���ɂ͎䂩��邯��ǁA����ς�i�E�̉摜�j�������̂������Ă悢���ȁ[�Bf2.45F2.0 4800�~��B
 �@�@
�@�@
�]�|�����s�̌����ŁA�\�[�X�R�[�h�߂Ă�����A�������@�ׂ����˂ܐ旧���@�Ƃ����p�^�[�������e���Ă���̂ɃR�[�f�B���O���Ă��Ȃ����ƂɋC�Â����B
�ǂ�����A�V�r���A���ԂɈڍs����̂����A�����ɂ͂��邩�A��ɓ��邩���قȂ�B�@�����͂킩���Ă�̂ŁA�������ƃR�[�f�B���O�����Ⴄ�����Ǝv�����̂����A�҂Ă�H�`���g�ƃp���p������̂����A�`���g�́�0�@�p����0�ˁ@�Ƃ����p�^�[���̎��͂ǂ�����H�@�قƂ�ǂ��肦�Ȃ��g�ݍ��킹�Ƃ��v����̂����A������Ƌ����{�ʂŌ������Ă݂��B
�}�͎x���r�̑�����\���Ă���B�Ԋۂ͐ڒn�_�A���͈ڍs�������B
���ܑΉ����Ă���ڍs�p�^�[���͍���̐}�B�@���łɎ������悤���ƍl�����̂��E�̃p�^�[���B�����A�����̎��̃^�C�v���Ή��������Ȃ�B���̈ڍs�^�C�v�͒����I�ɂ͈ڍs�ł��Ȃ��̂ŁAA�̌o�H���l������BB�̌o�H�͒��S���ڒn�_�ƂȂ�͓̂��ٓ_�Ȃ̂ŏI�[�ɂ����u���Ȃ��B���̂��߁A�V�r���A���Ԓ��Ɉڍs���邱�Ƃ��l�����A�o�H�ɂȂ�B
�����A���ہA�����̊p�Őڒn���Ă����肵�Ȃ��̂Ŏ�����g���Ȃ������ɂȂ�B
�����ŁA�p���ڍs���ԁi1���̎��ԁj��4�����x���������ԁi�d�S�ړ����ԁj�ł���̂ɒ��ڂ��AB�̌o�H������������@�ɋC�Â����B�܂�A�}����̈ڍs���������Ԃɍs���A�}�E��̈ڍs��V�r���A���Ԃɍs���O���[�ƃs���N�̌o�H�̑g�ݍ��킹�ŕ\�����ڍs�p�^�[���͂��ׂđΉ��ł��邱�ƂɂȂ�B
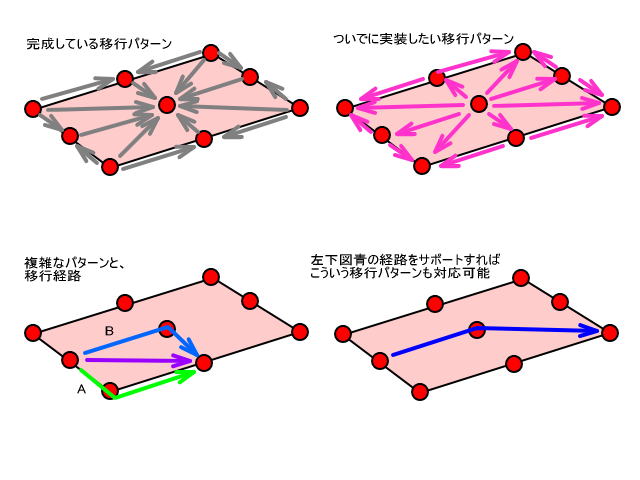
�}����̃^�C�v�Ȃ痼���x�����ԂɈڍs����̂ň��肵���ڍs�����҂ł���B�@�����A�������Ԃ͒Z���ꍇ������̂ł��̕ӂ�Ő�������������BA�o�H�͎�����P�p�X�Ȃ̂ɑ��ĂQ�p�X�ɂȂ�̂��C�ɓ���Ȃ��Ƃ����C�ɓ���Ȃ��B
���Ȃ݂�B�o�H��p�x�̕��������]����悤�Ȉڍs��V�r���A���ԂɈڍs�����i���Ȃ��킯�ł͂Ȃ��B��̓|���U�q��A�������悤�ȋO�����l����Ή\�B
�������Ԓ��ɑ����̎p����ύX����Ƃ����l���́A�V�r�ɂ��K�p����Ε����g��̍ۂɖ��ɗ��B�@����A�����Ƃ������ƂŎ����������n�߂��Ƃ���A���Ⴂ�ɋC�Â����B
�Q�p�X�ɂȂ�킯�����A���ǂ͎x���r�̐ڒn�_���ύX���邱�Ƃɂ͕ς�肪�Ȃ��B��̓|���U�q�̘A���͕K�{�������B�@�������������炢�܃T�|�[�g���Ă���ڍs�p�^�[�������ł��������Ԃł̈ڍs�^�C�v�̃v���O����������ċ�����Ă݂邱�Ƃɂ����B
�}�N���Ő�ւ��ăR���p�C���ł���悤�ɂ��Ĕ�ׂĂ݂����A�V�r���A���ԂɈڍs����^�C�v�̕����Ȃ�Ƃ�������̊�������B�������ԂɈڍs����^�C�v�͎���ĕt���������B�@�����J�ڎ��ԁi0.4�b�j�Ȃ̂ɉ������ԂɈڍs����^�C�v�͂��čs���ĂȂ������B
�ǂ������D��Ă��邩�͏ŕ������̂��낤�B�J�ڎ��Ԃ������Ƃ��͓��R�������ԃ^�C�v�A�Z���Ƃ��͗V�r���A���ԃ^�C�v�Ƃ������Ƃ��납�B�d�S�ʒu�ɂ���Ă�����s���肪���肻���Ȃ̂ŁA�����Ƃ��������đI���ł���悤�ɂ��Ȃ���Ȃ�Ȃ��̂�������Ȃ��B
�|���U�q�̎x�_�ړ��i��̓|���U�q�̘A���j�̌��͂܂������@�����B
�]�|�����s�ɂ��Ă��S�R�i��łȂ��킯����Ȃ��B
����
�@�O������̏����Ɍ������E������B�����̍Œ�l�����Ȃ���Ȃ�Ȃ��B
�A�]�|���莞�Ɏp���i�����̈ꕔ�������Ă��܂��Ă����ԁj�f���Ȃ���Ȃ�Ȃ��B
����2�_�ł���B
���ɇA�͖��̓|���U�q�̎x�_�ړ�����������ꍇ���l�����Ȃ���Ȃ�Ȃ��Ƃ������ƁB�@�͋O���G�l���M�[����t�Z����ΊȒP�ɎZ�o�ł���B�l���˂Ȃ�Ȃ��͍̂Œ�l���l�����������̌���菇�B
�ܐ�˂ׂ����@�ƁA�@�ׂ����˂ܐ�p�^�[�������L�ł���v���O�����L�q���v�����Ă��܂����̂ŁA���ǁA�}��A���[�g�̈ڍs���@��g�ݍ���ł��܂����B�����Ǝg��Ȃ����낤���A�{���͓|���U�q�̎x�_�ړ��������������������̂����A�܂��������낤�B�p�Y�����������悤�Ȃ������������C�������Ȃ��ł��Ȃ��B(*^_^*)
���������͓]�|�������낤�B
���V���P�U����
�]�|�����s�̂��߂̐��������낢��B
���܂܂ł͍����p�����[�^������Ԃ�����Ƃ��Ă����̂����A�����ɕύX�B�����̌X���p�����[�^�ɉ��������Ɉ�C�ɕύX���ׂ��������̂����A�e������������̂��ʓ|�������̂Ő摗��ɂ��Ă����B
�ׂ����˂ܐ旧���@�̃p�^�[���ŁA�����̃p���p�������Ƃ�����Ɠ��삪���������B�U�X�Y���A�|���U�q���샂�[�h���P���U�q�̏ꍇ�ɂ��������Ȃ�炵���B���`�|���U�q����Ȃ���Ȃ��B�ʏ�g���̂͒P���U��q�Ȃ̂ł�����ƃ��������Ȃ̂����A�����̏��݂��킩�����̂ł��������������@���l���悤�B
����Ɋ֘A���āA�P���U�q����Ɏg���U��q������̌������������B���܂܂ł͐ڒn��_�𒆐S�ɉ�]�����Ă������A����������Ԃ��ʼn�]������悤�ɂ����B
�����������������قڏI������̂ŁA�O������i�]�|���j�̎p����]���l�����̂����A���\����B�����̌X������ꍇ�Ȃǂ𐳊m�ɍl����Ɠ]�|���̍l�������ς���Ă��Ă��܂��B�����I�Ȑ��ł�����x�p�����i�荞��ōl���˂Ȃ�Ȃ����낤�B�@���Ȃ݂Ɍv�Z������e�͂����̍��W��]�Ȃ̂ŊȒP�B���ׂĂ̏�Ԃ��l���ăv���O��������̂�����Ƃ������ƁB
�������E�̍l�������܂Ƃ܂�Ȃ��B���̏�Ԃ��ƃv���O�����ł��Ȃ���ȁ[�B�C���[�W���܂Ƃ܂�Ƃ��邷��Ɛi�ނ̂����B
���V���Q�P����
����͒������������Y���͂����̂ő����J�����Ɏ��t���ċ�����Ă݂��B
���R�B�B�B�@�S�R��p�������B�B�B�@���85�x���炢�B�B�@�����������킩��Ȃ��Ȃ�X�ɂ��낢�뒲�ׂĂ݂���A������Ƃ킩���Ă����B

��p�͏œ_�����Ō��܂�̂ŁA�P�œ_�����Y�̏ꍇ�͌����ʂł̉�p�͌���B�������A�B���ʂ̖ʐςŎ�ς���Ă��邽�߁A���ۂ̉摜�̉�p�̓J�����ɂ���Ă����E�����炵���B
f=2.45�Ȃ�CCD��1/3�C���`�Ȃ��p105�x�A1/4�C���`�Ȃ��p80�x���炢�Bf=2.45mm�ʼn�p150�x���Ă̂͂��肦�Ȃ����낤�ȁB��A���A������������Ίp��p�ŕ\�������Ă���̂��B�@�ł��A�����Y�����ʔ̃V���b�v�͉�p���f�ڂ��ĂȂ��������炱����̃~�X�ł��Borz
�����ʼn�p��90�x���x���Ă������Ƃ�CCD��1/4�C���`�������̂��[�A����A1/3�C���`��CCD�J������Ȃ���Ȃ�Ȃ��A�A�Ǝv���Ē��ׂĂ݂��̂����A�ǂ���玝���Ă���J�����͂��ׂ�1/3�C���`�炵���B1/3�C���`��CCD�B���ʂ�4.8�~3.6�A1/4�C���`�̏ꍇ��3.6�~2.7�B�@�����Ă���J�����ׂ�ƌ����ڂɂ�1/3�C���`�B�@����A�L����f�͈͂��`���C���߂Ȃ̂����m��Ȃ��B�T���v���摜�Ɣ�ׂĂ݂Ă��A1/3�C���`����4���ɃP�������o�����炵�����P�����͂܂����������Ȃ��B�@�ǂ���烌���Y�̉�p��肹�܂߂ɂ����B���ł��Ȃ��炵���B�V���{���B�B�J���������������������������ȁ[�B
�����܂Œ��ׂ�Ԃ��Ռ��I�Ɉ����ʔ̃V���b�v���I�@�Ȃ�ƁAf=2.45�̃����Y����1800�~�I�@�I���~�X������ɍ��߈����Ă��܂����B��`�����{�B�B�@�܁A�ς��Ƃ͎d�����Ȃ��B�������������Ƃ�������������炱���Ń����Y���������B
���͂��Ȃ��������ɏオ���Ă����A�ł���f=1.78 F=2.5�A����Ə�����f=1.78 F=3.0�B�@���������������̂����A�Â��̂��C�ɂȂ�B�Î~��B�e�Ȃ�Ζ��Ȃ��̂����A����B�e�ɂȂ邽�߁A�V���b�^�[�X�s�[�h���x���Ȃ�i�I�����Ԃ������Ȃ�j�ƁA���[�V�����u���[���傫���Ȃ��Ă��܂��Ȃ��i�Ǝv���j�@���̂��߂ɂ킴�킴CMOS�J������CCD�ɕύX���Ă���̂Ƀ����Y�ő���������������Ȃ��B���̒��x�̖��邳�̍��Ȃ�A���O�Ȃ�Ζ��Ȃ��̂����A�����͈ӊO�ƈÂ��̂ʼne���͑傫���i�Ǝv���j
�X�ɂ͏��������͒Z���̂Ńs���g������Ȃ��\��������B���̎��̓J�������̃}�E���g���������Ȃ���Ȃ�Ȃ��B�@��������Ƃł������̃����Y�͎��t���Ȃ��Ȃ�\���������B�܂��܂��`���̗\���B�Ђ����`�B�@�����Ăł��������Y�͂�͂�ł��߂��邩�ȂƁA�炪�ڋʐe���ɂȂ��Ă��܂��̂��C�������A�Ȃɂ��d�������Y���u���u���ƐU��̂͂��낢��s���B�����͌y�����������B�@���Ȃ݂�9800�~��f=1.24�Ƃ����I��������̂����A����̓P�����̃G���A���傫�����ĕʂ̕s�����傫���B�l�i�����������̂Ƃ���̓{�c�B
 �@�@
�@�@
�e�p�����[�^���r���Ă݂�B
�T�C�Y �d�� �œ_���� ���邳 ���҉�p �V���b�^�[���x �ł������ ��30�~25mm 15g f=1.78 F=2.5 155�x 1.6�{ ����������� ��18�~15mm 5g���炢 f=1.78 F=3.0 155�x 2.3�{
�V���b�^�[���x�͕W���I�ȃ����Y�iF=2.0�j����Ƃ����Ƃ��̒x���ŕ\�����B���a���{���炢�Ⴄ�̂Ő��ʂ��猩���Ƃ��̖ʐς�4�{�Ⴄ�B�d����10g���x�Ǝv���邪�A����10g�͂قƂ�ǃ����Y��[�����ɏW�����Ă���B�V���b�^�[���x�̈Ⴂ�͋C�ɂȂ�悤�ȋC�ɂȂ�Ȃ��悤�ȁB�B
�ł�������̗p����Ƃ��ɂ̓����Y��[�ɏd�S����̂Ńu���u���U����Ƃ�O���ɂ������J�����̔z�u�����Ȃ���Ȃ炸�A���̌����ł͂܂����B�t�ɂ����������͌y���ď������̂Ŕz�u�ɂ͐����͂Ȃ����낤�B�@�E�E�E�@�d���ɑ��ăT�[�{�̃g���N�͏\�������A����܂�C�ɂ��Ȃ��Ă������ċC�����Ă����B
�����ł���̂͂ǂ���ɂ��Ă��T�����B�@���������l���Ă�����y�����I����Ă��܂��̂ł��̌��͓�����p�B�y�j���̖�ɒ������悤�B
���V���Q�Q����
�������ׂ����˂ܐ旧���ƂȂ�^�C�v��pan�p����������^�C�v�̓��삾�������܂������Ȃ������̂����A����Ƃ��ꂪ���������B
���������z�d�S�_���g�����P���|���U�q����ɂ���Ƃ������Ƃ�˂��~�߂��̂ŁA���炭�l����̂���߂Ă����̂����A�ӂƉ��������C�������̂ł�����Ǝ�����Ă݂��B���s����̏ꍇ�͕��𑫂�����������肷�邾���ŕ�ł����̂����A��]����ƂȂ�Ƃ����P���ł͂Ȃ��A��{�p���̏d�S�_�̈ʒu���Ⴄ���Ƃł��������Ɍ덷���łĂ��܂��̂������������B
���`�|���U�q�p�̃I�t�Z�b�g�p�����[�^�p������A����ɂ͏����p������I�t�Z�b�g����`�����������肵�Ă���Ɨ����������B�ӂ��B�B
�ŁA���������͓]�|�����s�ɐi�W���A�Ƃ������ƂŒ��肵���B
���ǁA���낢��ƌ��������̂����A�]�|����͗����Ƃ��ɂׂ����ŁA���ʂɗ����Ă��鎞���l���邱�ƂɌ��肵���B�����āA�x�����p�`�̕ӂ��ł͂Ȃ��A�x�N�g���Ƃ��đ����i�܂���������j�A�����ɓ������[�����g�x�N�g���̕����œ]�|�����肷�邱�Ƃɂ����B
�x�����p�`�̎Z�o������]�|�����𒊏o���ă��X�g��������x�N�g���������肷��悤�Ƀv���O�������C�����Ă������ƂƂȂ�B
����A��Ύg��Ȃ��̂��낤���A��������������u�ׂ����˂ܐ旧���v�����]�|�����s�̊��ɓK�p�����肵�Ă����̂����A����e�X�g���ɂ��܂�ɂ��]�|�����s���������ȓ��������̂Łi������Ȃ��o�O�������Ŕ������ĂԂ����j�A��莋���Ă���ߎp�����̕������폜���ē��삳�����Ƃ���A���̂˂��ꌻ�ۂ����������B
���Ȃ����l���Ă����d�S�ʒu�̖�肾���ł͂Ȃ������̂��[�B�@�Ƃ������ƂŁA�x�܂��Ȃ���A���샍�O���̎�ł���悤�Ƀv���O�������C���B�������Ă���Ԃ͗l�X�ȃ��O���t�@�C���Ɏc���Ă����悤�ɂ����B�Ƃ肠�����̓��O�����ӂ�Ȃ��悤�ɒʏ���s�Ɠ]�|�����s�̂ݏڍ׃��O����邱�ƂɁB
���O�����Ȃ��瓮�삳���Ă݂āA�Ƃ��Ƃ��������ȕ����ɓ˂����������I�@�]�|������J��Ԃ��āA�������Ȏp���ɂȂ��Ă���Ƃ��ɒʏ���s���s���Ƃ��̌�̓]�|�����s�ő����˂���o���炵���B�@�ڍ׃��O����ꂽ�̂ł������������͉𖾂ł��邾�낤�B
�J�����̌������ACMOS�J�����ɂ����t���Ă݂��B����̓X�s�[�V�[�Y���{�b�g�W���̃J�����Ȃ̂ŃA�v���ŕ\���B����ς�P�����͏o�Ȃ��炵���B��O�̘p�ȓx��CCD�����傫���悤�ȋC������ȁB
�����k�ʼn摜�𑗂�Ƒ�ς��B1�t���[��31kB������B�@���k���邩�Ԉ��������Ȃ��ƂȁB�@�摜��������ɂ��Ă����ꂶ��傫�߂��ď����Ɏ��Ԃ��������Ă��܂��B

�N���オ������p���ł̓�����l���Ă����炾�N���N���Ă����B���낻��㔼�g�N���X���l���悤���ȁB
���s�ȊO�̓����������Ă݂����Ȃ��Ă����̂łƂ肠�������[�V�����Đ����R�[�f�B���O���悤���ȁ[�Ƃ��B���ΊȒP���낤���B�B
���V���Q�R����
����̖�ɒ������[�����o���������Y�B�@�̃��[���ł����ɑ���U���݁B�@�����̂����ɔ����̘A�������܂����B�����ɂ͓͂����ȁ[��@����A���X�N���肠�肾����C���������߂āI
�]�|�����s�̂������ȋ����͊ȒP�ȃo�O���ЂƂ����B�����܂Ƃ��ɓ����悤�ɂȂ����B�@�d�S���ς�����������őO�ɂ����͌��\�Ȋm���œ]�|����ɐ�������B�ܐ�Ƃ���������K�v�Ȃ��������[�Ǝv�킹��قǁB�@�w�����|���|���Ɖ����Ă�����1�����i��ŕ����Ă��������B�u���������A�����s���Ȃ����B�v���ā[�����B�@�ł��A�@�̂̃o�����X���悭���ē������悭����̂��ĈႤ���Ĉʒu�Â��ŊJ�����Ă�̂ł���͂���A����͂���B���ς炸���ɑ��Ă͑S�R�_�������B
���Ȃ݂ɓ]�|����̎��́i���̏d�S�o�����X�ł́A�Ƃ����O�u�����K�v�����j�@���z�d�S�_�̐ݒ���N���A����ƈ��肷��B�@���s�́A���z�d�S�_�{�������ԑ�A�܂��͉��z�d�S�_�Ȃ��{�������ԏ��@�Ŕ�r�I���肵�ĕ����B�@�������A���z�d�S�_�Ȃ��̏ꍇ�͕����n�߂ɃR�P�����Ƃ������̂ł܂��������K�v�B�@�C�Â������ł����B
�]�|�����s�̊g���̌��́A�]�|���̒��o���������A�]�|�����X�g�Ƃ��ĊǗ�����`�ɂ����B����̓]�|���͂����̃��C������Ȃ��āA�x�N�g�������Ȃ̂ŕ���������B���C���̂Ƃ��͌X����-90�x�`+90�x���������ǁA���������邩��-180�x�`+180�x�܂łɂȂ�B���̕������]�|�������l����̂ɖ𗧂̂��B
���V���Q�T����
�����Y�����������I
�����J�����Ɏ��t���āA�s���g�����������m�F�B�B�B�@�������`�A�s���g�͈͓����I���̉摜�́A�J�����摜��\�����Ă���f�B�X�v���C���g�тŎB�e���Ă�摜�Ȃ̂ʼn掿�����܂����B���Ă������J�����������������ƂȂ��̂ł��Ƃ��Ƃ���Ȃ��Y��ȉ摜����Ȃ��B ���A���ǁA�w�������̂͂����������̃����Y�ł����B�����������������������A�����s���g������Ȃ���}�E���g�������H����Ȃ�Ƃ��Ȃ肻�������A�Â��������l�b�N�Ȃ̂����ACMOS�ł͂Ȃ��ACCD���g�����ƂłȂ�Ƃ��Ȃ邩�ȂƂ������f�B
��p�͖ڎZ�ł�160�x���炢�B�����ˁ[�A���ꂭ�炢�Ȃ王�삪�L�����Č����������B�@�E�E�E�ł��A�P�������ق�̂킸�������Ȃ��B�������ǁA�Ȃ�ł��ȁH

��p�̍L��������킵�Ă݂�ƁA�A�@�������������Ŗ��̕����ɃJ������������ƁA

������ƌ����ɂ������ǁA�ۂň͂����Ƃ���ɐԂ��o�b�e���[���ʂ��Ă�B��

�����ڂɂ͖��邳�͖��Ȃ����A�����������ǂ��ʂ邩�����B����̓L���v�`���[���Ă݂Ȃ��Ɗm�F�ł��Ȃ��B
�܂��͂��̃����Y�Ői�߂悤�B
�摜�Ɋւ��ẮA�J�����摜����荞���CDT�ŐF���o���ł���悤�ɂ���A�Ƃ����̂����ۑ�Ƃ��āA���L�p�摜�����ăp�m���}��ʂ����Ƃ������Ƃ�����Ă݂����ȂƎv���Ă���B�@���{�b�g�������摜�Ȃ̂Ől�Ԃ�����K�v�͂Ȃ��A�܂�͐l�Ԃ����₷���悤�ɕ����K�v���Ȃ��̂œ�̎��O�̎��̎d���Ȃ̂����B�@����ɂ́A���炭�͎�������Ȃ��̂����u��Ԕc���v�̈�ŁA�������\�����钼���𒊏o���ċ�Ԃ̍\���i�\���H�j��F������A�Ƃ����̂��l���Ă���B�摜���璼���𒊏o����̂̓n�t�ϊ����g���̂���ʓI�����A�Ђ��摜����ł͂��܂��s���Ȃ��͂��B�����̂Ђ���ł��Ȃ����������Œ��o������Ď�����邪�A�A�A�������l���悤�B
�A�C�{�ŊJ���������̔F���v���O�����̈ڐA�͂��炭��ɂȂ邩�ȁ[�B�܂��̓��{�J�b�v�����{�[����F�����ăg���b�L���O�ł���悤�ɂ��邱�Ƃ��挈�B
��������A���{�����T�b�J�[�ŁA�u������r�����Ȃ��v���ď����Ă��̂������o�������邪�A�{�[�����Ă�����T�b�J�[�{�[�����������̂ł͂Ȃ��������H�܂��T�b�J�[�{�[���������܂��F������͓̂���ȁB�́A�A�C�{�̃J���t�@�����X�ŃT�b�J�[�{�[����F�����邱�Ƃ��e�[�}�Ɍ������Ă���l�����\���Ă��o��������B����Ȋ���������u�r�����Ȃ��v���Ă̂͌������ŁA������͎����r���ɂȂ�������Ă�ȂƎv�����B
�]�|�����s���U�߂����˂Ă����Ԃ̂����A����낤�Ƃ��Ă���u�p�����l�������]�|����v�ƁA�u�p�����l�������]�|�����s�i�ܐ旧���T�|�[�g�j�v��܂荞��A���ʂ͂ǂ�����A��x�J�������ɂ��悤�Ǝv���B��̎v�����Ƃ���͂��ׂĎ������邱�ƂɂȂ邵�A���{�b�g�̂悤�ȑ������u�͊e���ʂ�t�@���N�V�����̃o�����X���厖�ƍl����B���̂��Ƃɂ��͂����Ȃ���ˁB
�ł��A���͍��̋����͓]�|����ł��Ȃ��A�摜�����ł��Ȃ��A�N���オ��Ȃǂ̓�����ǂ̂悤�ɕ\�����邩�A�Ƃ������ƂȂ̂��B���̉����g�p���\���͗����Ă��邱�Ƃ��O������ɂȂ��Ă��āA�����Ă��鎞�E�Q�Ă��鎞�E�G�����Ƃ������p���͕\���̔��e�ɂȂ��B�����Ă��鎞�ȊO�̎p���̕\���ƁA�㔼�g�̎p���A������n�ʂɎ��t���Ă���Ƃ��̂悤�Ȏp�����l���A�����ׂĎl���̎p����\��������A����Ńn�C�n�C��������A�������痧���オ�蓮���\��������Ƃ������Ƃɋ������o���Ă���B�@�����オ�蓮��r���ŃA���o�����X�ɂȂ�����A�]�|����ň�����ݏo�����肷��l�q���v�������ׂ�Ƃ�����ƃ��N���N����B�@�i�A�g���h���Ă킯����Ȃ����A�A�A�A�g�����͂��߂Ċo�������Ƃ��ɂӂ�ӂ痧���オ��l�q�B�����n�ł��悤�Ȑ���ˁj
���V���Q�V����
���Ƃ��������Łu�p�����l�������]�|����v�̊����o���オ��B�Ђ��Ђ��B�B�@�Ȃ��킩��Ȃ����Ȃ��Ȃ��i�܂Ȃ��B
�����Y��t���ւ���CCD�J������RPU100�ɐڑ����邽�߂ɃJ�����p�d������郌�M�����[�^��H�����˂Ȃ�Ȃ��B8V�Ȃ��ǁA��̃T�[�{�Ɏg��RS302CD�̓d���Ƃقړ����B�S���̗e�ʂ��܂��Ȃ���悤�ɂ������̂����ARS302CD���čő�d���͂ǂꂭ�炢�Ȃ̂��ȁH�J�����ƃT�[�{�̓d�����ꏏ�ɂ��Ă��܂��̂͂܂��������BRS302CD�p�̃R�l�N�^��爳�̓Z���T�[��d�����o�Ɏg���I�y�A���v�����܂Ƃ߂Ĕ����������̂����i������蕔�i��̕����������Đ����Ȃ̂Łj�@��H�v�͋��Ȃ̂ŕ��i�����܂�Ȃ��B�@�T�[�{��H�̎����̂��߂�DualFET�Ȃ��������Ă��������̂����ARS�R���|�ɂ͔����ĂȂ��݂����B
���َp���ɂ��Ă͏����܂Ƃ߂Ă݂��B
�l������p���^�C�v�́@�@���ʁ@�A�G�����@�B�G�Ŏl���@�C�G���グ�Ďl���@�D���ʁ@�E�Q�ʁi�����ނ��j�@�F�Q�ʁi���ނ��j
������㔼�g�Ɖ����g�ɕ������
�����g�@�@���ʁ@�A�G�����@�B����
�㔼�g�@�@���ʁ@�A��t���i�n�ʂɎ��t������ԁj
���Ƃ��Ώ㔼�g�F���ʁ@�����g�F���ʁ@�˗��ʁ@�@�㔼�g�F���ʁ@�����g�F��t���@�˕G���グ�Ă̎l���@�Ƃ����������ō\�������B�Q�ʂ����傢�Ɠ��ق��ȁB
�ł����̎p���^�C�v�Ԃ̈ڍs������Ă̂��l���đ��݈ڍs����B�@�����˕G�Ŏl���˕G���グ�Ďl���˗��ʁ@���Ċ����ňڍs���Ȃ��痧���オ��B
�G���グ�Ă̎l���͂S�����s����������B�@�ŁA��Ƒ��̊Ԋu�����߂Ă����ǂ����łQ�����s�i���ʁj�Ɉڍs������Ċ����ɂł��Ȃ����ȁB�@���̂Ɏ����Ȃ����炻���܂ŏ_��ȓ���̓������ۂ��ȁB
���V���Q�W����
�ߑO������u�p�����l�������]�|����v�̑����B
���ǁA���̂Ƃ���͓|���U�q�̎x�_����ւ��^�C�v�E���̂܂ܓ]�|����^�C�v�E�E�ȂǂƂ����^�C�v�ʂ��Đ�ւ��^�C�v�͐�ւ��^�C�~���O�ׂāE�E�Ƃ��������̋L�q�ɂȂ��Ă���B�܁A���ꂵ���Ȃ����ȁB
�Ƃ��낪�A������ƍl�@�s���������āA�����ʒu�A�������x�A�ڕW�ʒu���킩���Ă��Ă��ڕW�ʒu�ł̑��x�A�ڕW�ʒu�܂ł̑J�ڎ��Ԃ��v�Z���邱�Ƃ��ł��Ȃ����ƂɋC�Â��ĂȂ������B����J�ڎ��Ԍ�̈ʒu�����������Ɂ@sinh�@�Ɓ@cosh�@������A���̒��ɑJ�ڎ��ԁ@t�@���łĂ���̂Ł@t=�E�E�@�̎��ɕϊ��ł��Ȃ��̂������B�Ƃɂ����J�ڎ��Ԃ����߂�Ƃ����Ȃ�ڕW�ʒu�ɒB����J�ڎ��Ԃ�T���˂Ȃ�Ȃ��B
�]�|����̓C���^�[�o�����Ԗ��Ɏ��{����̂ŒT���̂悤�ȏ����͂ł��邾����肽���Ȃ��̂��B�@���x�͂���قǕK�v�Ȃ��̂łȂɂ��ȒP�ȕ��@�ŋߎ��ł��Ȃ����낤���H
�����A�C�f�B�A���o�Ȃ�����ق��̎������悤���ȂƎv���Ă���Ђ�߂����i���Ăقǂ���Ȃ��ȁB�C���t�����A���ȁj�@�O���G�l���M�[����t�Z��������̂������B���̏ꍇ�J�ڎ��Ԃ͕s�v�ŖڕW�ʒu�ł̑��x���킩������̂��B�������A�ʒu�����x���킩�����̂őJ�ڎ��Ԃ��Z�o���邱�Ƃ��\�B�悩�����[�B��ɐi�߂�B
���ꂩ��o�����Ȃ���Ȃ�Ȃ��̂ł����܂łŃX�g�b�v�B�܂��]�|����{�̕����̋L�q���������Ă��Ȃ��B�������ɋC�����Ȃ���B�����͖�B
���V���Q�X����
�u�p�����l�������]�|����v�͍��A�R�[�f�B���O���������ăf�o�b�O���B
�������̃o�O�����z���āA�ǂ����v���ʂ�ɓ����Ă͂���炵���̂����A�]�|����̐��������Ⴂ�B���ɑO�ɓ|��鎞�̔��肪�ł���߂ɂȂ�X��������B
���̓f�[�^�Ƃ��Ă͉����x�Z���T�[�f�[�^�ƃW���C���Z���T�[�f�[�^�����A�����x�Z���T�[�f�[�^���瓷�̕����̎p���p�x���Z�o���Ă���B�W���C���Z���T�[�͓��̂́i�Ђ��Ă̓��{�b�g�S�̂́j�ړ����x�i���m�ɂ͊p���x�j�Ă���B
������e�́A���ݎp���Ɠ��̎p������H�ʂƂ̐ڒn��ԁi���̂ǂ����ڒn���Ă��邩�j��ǂݎ��A�p���x��������]�|����������A���p���i�ׂ�����ԁj�ɖ߂낤�Ƃ���������f����B�]�|��������Ȃ炻�̂܂ܓ]�|����ցA���A�����Ȃ琳�p���ɂȂ�����Ԃł̏d�S�_�̑��x���v�Z���āA���̑��x���g���Ă̓]�|����ւƐi�ށB
��ɔ�����ԈႤ�̂͏����p�����ׂ����ł͂Ȃ��A���A��������ւ̊p���x�����ꍇ�A�p���x�����肸�ɕ��A���ł��Ȃ��Ɣ��f�����p�^�[�����B
�l�����邢�����̖��Ƃ��Ă͉����x�Z���T�[�f�[�^�̒x���Əd�S�_���W�̌덷���l������B
�����x�Z���T�[�f�[�^�̓m�C�Y�������̂Ńm�C�Y���_�N�V�������s���Ă��邽�߁A��������ɂԂ��Ǝv����B�@�d�S���W�ɂ��Ă͉����g�̏d�S�͗����̌Ҋ߂̒��_�ɂ���ƋK�肵�Čv�Z���Ă���B���ۂɂ͂���ɏ㔼�g�̏d�S���I�t�Z�b�g���Ă���̂Ŏ����f�^�������B���ۂɂ͂����ƒႢ�ʒu�ɏd�S������B
�Ȃ̂Ɏ����Ɏ�œ]�|�ԍۂ̏�Ԃ����A�����x�Z���T�[����̃f�[�^�ɂČv�Z���Ă݂�Ɓi�Î~��ԂȂ̂Œx���͊W�Ȃ��j�T�˓]�|���ɏd�S���ڂ��Ă���悤�ɑ��肳���B
���A�l������덷�������ЂƂ������B�����x�Z���T�[�f�[�^�̕ϊ����[�g���B�����x�Z���T�[�͎�����A�d�͉����x�𑪒肵�Ă���̂����A�O�p���ɂĊp�x�ɕϊ����Ă���B���̂��߁A�X�����傫���Ȃ�ƕ���\�������Ȃ�X���ɂ��邪�A30�x���炢�܂ł͖��Ȃ��͂��Ȃ̂����B�@����ɉ����x�Z���T�[�f�[�^�̌덷���x�z�I�ł���A�O������둤�������悤�ɂ��Ĕ���~�X����͂����B
�Ȃ�ɂ���A���������f�[�^���W�߂A�e�p�����[�^�̒������K�v�Ȃ̂��낤�B�@���낻��S�g�̏d�S�_���v�Z���Ȃ���Ȃ�Ȃ��̂��ȁB
�㔼�g�̏d�S�_���b�`�c�f�[�^�Ōv�Z���Ă݂��B
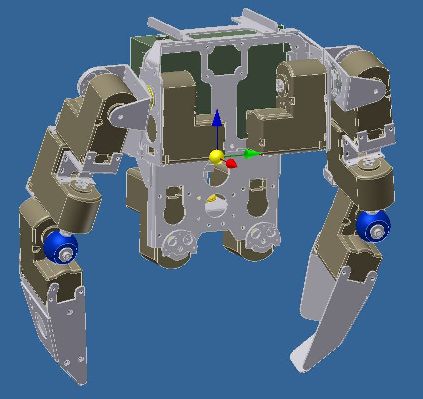
�v�Z��̏d�S�_�ł���A�Ҋߒ��_�Ƃ̃I�t�Z�b�g�l�́@X=0mm, Y=-32mm, Z=54mm�@�@���̐ݒ�́@X=0mm, Y=-28mm, Z=50mm�@�Ȃ̂Ŏ�����������B���A�e���x�����ȁB���ړI���͑��ɂ���ƌ����B
���̃y�[�W�������Ȃ����B�U���̃A�^�}���炾����܂�܂�Q�������A�W������͐V�y�[�W�ɐ�ւ��悤�B�@�U���Q���̓���������Ɓu�]�|����ŏI�́v�Ƃ������Ă�B�S�R���ȁB��͂�A�]�|���̃C���v�������Ŋw�m�̑��_���炢�͏�����l�^���낤����A�P�����ŃJ�^�`�ɂ���Ƃ��������̌v��ɖ������������Ƃ������ƂȂ̂��낤�B���ς���͓���B���C�����ł̓_���Ȃ̂��B�\��̐��x���グ�邽�߂ɂ̓h���C�Ȕ��f�A�q�ϓI�Ȕ��f���K�v�B
�܂��܂����Ⴂ���Ă����B�d�S�̂���͉����g�̏d�S�����Ă������߂��B�@���傤�ǒނ荇���Ǝv������v�Z�ł͓]�|�Ɣ��肵�Ă��܂��Ƃ������Ƃ͏d�S�͂����ƒႢ�Ƃ������Ƃ��B�@�㔼�g�͍��̂Ƃ��듮���Ă��Ȃ����ߒ萔�ŗ^���Ă����Ȃ����A�����g�̏d�S�_�͒萔�ŗ^����킯�ɍs���Ȃ��B�p�����ς��Əd�S�_���ς�邽�߁A���{�b�g�S�̂̏d�S�_���ς��B���悢��d�S�_�̊Ǘ������˂Ȃ�Ȃ����B
���Ȃ݂ɉ����x�Z���T�[�̕ϊ��W���͂Ƃ肠�����K�������B�S�T�x���炢�܂ł̌X���ɑ��Ă͑傫�Ȃ���͂Ȃ������B�@����ȏ�̌X���͂��ꂪ�傫���Ȃ邪�W���̖��ł͂Ȃ��B���p����Ȃ�y���Z���T�[�p����悤�ȏ����ɂ��ׂ����낤�B
�㔼�g�����Ə㔼�g�̏d�S�_���ς��B�㔼�g���x���Ă��鉺���g�͂��̕ω����Ēނ荇���悤�ɓ����A�Ƃ������Ƃ����������̂����A�����g�̏d�S�_���e�����Ă���ƂȂ�Ɩ��͕��G�B�㔼�g�̏d�S�ړ��ɍ��킹�ĉ����g�p����ς��邱�Ƃ͉����g�d�S���ω����邱�ƂɂȂ�A����͂܂������g�p���̕ω���K�v�Ƃ���B�B�@�P���ɂ͍s���Ȃ��̂ŏd�S�Ǘ��ło�h�c�t�B�[�h�o�b�N���������肵�Ȃ���Ȃ�Ȃ����B
�l���Ă݂�Ɠ]�|���Ƃ����̂͂Ȃ��Ȃ��I���˂��e�[�}�������悤���B�|���U�q���g���ē]�|��\�����A�ܐ旧���p�����T�|�[�g���A�Ƃ��Ƃ��d�S�_�Ǘ��܂ł��˂Ȃ�Ȃ��Ȃ����B�@���̂�����肽���ȁA�ƍl���Ă������{�b�g����̂����ȗv�f���K�v�ŁA����������u���Ȃ���Ȃ�Ȃ��Ȃ�v���������{�b�g�������ɋ߂Â��čs���Ă���B
�]�|�����s�𑁁X�ɏI��������肾����������������ɂȂ肻�����B�d�S�Ǘ��Ƃ����Ă����[�����g�܂Ō������͂Ȃ��ÓI�d�S�_�̎Z�o�����ł������낤�B�߂�ǂ����������Ōv�Z�͊ȒP�B���W�ϊ��Əd�S�����̃J�^�}���ɂȂ�B
�Ƃ͌����Ă��A�����̐��ʂƂ��ē]�|����̈ꉞ�̊����������������B�@�b��I�ɉ����g�d�S�Ə㔼�g�d�S�����������S�̏d�S��ɔ��f������悤�ɂ��Ď������Ă݂����A�ǂ����Ă����ꂪ�L��炵���A�v���ʂ�ɂ͓����Ȃ��B�@���܂܂ł̊ȈՓI�ȓ]�|����ɔ�ׂ�Ƒ����V�r�A�ɂȂ��Ă���B�d�S���̐��x�������Ȃ���Ύg���Ȃ��Ƃ������Ƃ��B�K���Ȓl�����Ē������悤�Ƃ��Ă݂����A�߂ɂȂ�p�����d�v�Ȃ̂őO��̂��ꂾ���ł͂Ȃ��㉺�̂�������킹��K�v������B��͂肫����ƌv�Z���Ă݂Ȃ���Ȃ�Ȃ��̂��낤�Ȃ��B
CCD�J������RPU-100�ɂȂ��ł݂��B���삪�L�������ɉ𑜓x���Ⴂ�B�@�̂̓o���t�H�[�J�������Y�𓋍ڂ��ăY�[���ł���悤�ɂ������ȁA�Ƃ��l���Ă������A�����܂ł̉�p���G���A�Ɏ��o���t�H�[�J�������Y�͂Ȃ����낤�BCCD�̉𑜓x���グ����Ă̂������I�ȓ������ȁB�@�J�����Q�@�𓋍ڂ��ăe���p�ƃY�[���p���Ă̂��������B�@����A�Q��ڂ�����Ȃ�X�e���I�r�W�����̕����������B
���̃J�����͓d���d��8V�Ȃ̂����A�莝���̒�R�̊W��7.77V�œ������Ă���B����A�����̐���Ɏg�����Ǝv���Ă���RS302CD�̓d���d���͈͂�7.2�`7.4�u�i�E�E�E���܂��j�@���Ԃ�A�J���������̓d���ł��������낤���烌�M�����[�^��H����{�����Ă��܂������������낤�ȁB�T�[�{�̓˓��d�������������āA�d���~���N��������͂��Ȃ����낤�B
���āA�J�������Ȃ��������Ƃ����A�摜�֘A�̃v���O�����ɂ����肵�����Ȃ��ƂȁB���x�����������ƏI��点�邼�I
�d�S�v�Z�̎d�g�݂��\�z���B
�e�u���b�N���̏d�S���W�Əd�ʂ��Z�o���I������̂Ń��f����������������B�A�C�{�ł������悤�ɏd�S�v�Z���������Ƃ��������̂ł��̓����̃v���O���������Ă݂��̂����A�A�C�{�͊e���̎��R�x���R�����Ȃ��B�����x���Ōv�Z����W�J���Ĉꔭ�ŎZ�o����悤�ɂ��Ă����B�����_�̏ꍇ�͂��ꂶ��[�Ȃ��B�B�B�@���͂U���R�x�A�r�͂S���R�x�A���͂R���R�x�ōl���Ă���̂ł��ꂼ��̓W�J����p�ӂ���͔̂n�����ۂ��B�ŁA�ߖ��ɏd�S���W�Ɗߏ��Ɛڑ������������N���X���쐬�B�@���X�g�łȂ��ŏ��ɏd�S���������Ă����悤�ɂ����B�@�����̂����ɑS�g�̏d�S���f�����\�z�ł��邩�ȁ[�Ǝv�����̂����A�N���X������ăR���p�C�����ʂ����Ƃ���Ŏ��Ԑ�B�����͖����B
�d�S�v�Z�̂����݂��l����ƁA�㔼�g���������Ȃ��Ă����B�㔼�g�N���X������ē�������悤�ɂ��悤���ȁB�㔼�g�̏d�S�̓����ɍ��킹�ĉ����g���o�����X�ێ��̂��߂ɓ����悤�ɂ���B���[�����g�Ƃ��܂Ōv�Z���Ȃ��Ă��g�����ɂȂ���̂��ǂ����B�B�B�@���܂܂ł̌o���ł͂����ƃ��[�����g���v�Z���Ȃ���Ȃ�Ȃ��Ȃ�낤�Ȃ��B�B�d�S�����̂悤�ɊȒP�Ȍv�Z�ł͍ς܂Ȃ��̂��낤�Ȃ��B
 �@�x���r�̌X�Έڍs
�@�x���r�̌X�Έڍs