
開発日誌(38)
■8月3日■
日曜日(7月31日)にパンツァーウォリアーズの見学に行ってきました。 見学のつもりだったのだけど、あちらのメンバーとこちらのメンバーを合わせて3チームに分かれてがっつりとフルコースでゲームを楽しんできました。
ジオラマ風だけど、芝生は人口芝、木はクリスマスツリー、建造物はMDFボードという具合にお金はかけないでいい見栄えになっている。 すばらしい。
熟練しているメンバーはずばずば~っと川を使って回り込んだりする。 川に入れるのはよいけど、川を通る方が早いのはいかがなものかとちょっと思ったり。

操縦席。 オーナーの森さんのこだわりで、操縦士と砲手が分かれている。 ・・・のに、12人で3チーム作ってたのでそれぞれ操縦士が砲手も兼ねることになっていた。 6人2チームで砲手作った方がいいなーとか思ったり。

ほぼすべて市販の装置を組み合わせてのシステムなので膨大なACアダプターが稼動することになっている。 名物のACアダプターモニュメント なかなかの異彩を放っている。

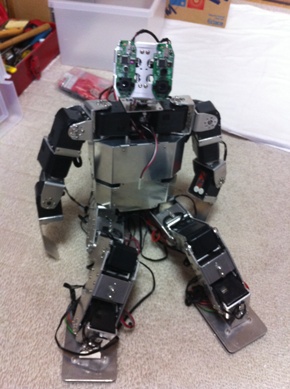
サバゲ用に改造パーツをつけられたサアガと、スタローン サアガはこのフィールドの中でも問題なく歩き回っていた。 ラムダがあんなふうに悪路を歩けるようになるのはいつなんだろうか。
前日深夜まで一生懸命整備をしていたシグマ。 色々不具合点が発生したので持っていくのはやめました。
シグマのサイズだと操縦を誤らなければぎりぎり歩ける程度の広さ。 シグマはちょっと育ちすぎたかなぁ。
実は週末からこっち夏休みです。 といっても外出の予定があるわけではないのでロボコロッセオに向けてシグマの整備を続けています。
パンツァーワォリアーズに持っていくのを断念した不具合というのが、
① 3カメラにしたが、自動起動がうまく行かない。(原因はわかっている)
② 3カメラだと画像がすぐ落ちる。 安定しないなぁ。。。
③ ちょっと動かすとサーボが熱で落ちる。(601は保護のため勝手に落ちちゃう)
というもので、バッテリーで動かすのに、立ち上げるたびにマニュアルでコンソールを立ち上げてカメラ用のプログラムを起動するのは無理だなぁと思いました。 そして②は結構テンション下がる思い。 こんなに早く落ちたっけ??? 1分くらいで落ちちゃいます。 シグマ、ダイエットしないといかんね。
自動起動については、カメラデバイスを認識する際にドライバーとネゴシエーションをする時間がかかってるので、ドライバーの登録が完了する前に自動起動がかかってしまって起動に失敗しているらしいので最悪はウェイトを入れればよいかと思ってます。
それよりもサーボがすぐ落ちる件も含めて歩行動作がイマイチ気に入りません。 アナログスティックで速度と方向を調整できるように歩行モーションをスムーズに接続できるプログラムを作ったはずなのに。。
ということで色々と確認かたがた整備していくことに。
・ サーボの動きがガクガクしていてスムーズさが無い ⇒ 制御周期を50Hzから100Hzにしてみる。 ⇒ 効果なし
RS601は、内部では1ms周期で補間制御しているらしいのだけど、移動コマンドを実行し、動作を開始する前に次の移動コマンドを受けた場合にトルクが落ちるというバグがあります。 たしかこのバグは解消したはずだけど、移動時間を20msとか10msとかの短い時間にして時分割で角度指定コマンドを送り込むとうまく動きません。
100Hzで動かしてもダメなのでこれは諦め。 最新のファームにしたらなんとかなるのかなぁ?
・ 逆キネがおかしくなることがある ⇒ 付け根と足先の距離がある程度以上小さくなるとおかしい ⇒ 修正
これは既知ネタ。 わかってたけど修正する間がなくて放っておいた件。 でもすっかり忘れていたので再検討した結果上記のとおりで場合分けをしないといけない。 まだ設定禁止領域があるので逆キネ関数はまだまだ未完成です。 あと、関節角度の移動可能範囲を反映して冗長性を活かして関節角度を同定するってのをやらなきゃならないのだけどこれも今回も見送り。
・ 歩行モーションに不自然さがある ⇒ 補間関数の間違い
書くと簡単だけどこれは解決するのに結構悩みました。 関数を作った時の検討メモを見ていて間違いにやっと気づいた。 多分これで思い通りに動いているはずなんだが。。。
・ サーボの起動に失敗する場合がある(結構多い) ⇒ 起動時に動作範囲を超えている場合に失敗するらしい ⇒ 動作範囲を少し広げた
逆キネ関数が不完全なものだからサーボに動作範囲外の角度指令が来た場合に機械的なストレスを避けるため、動作範囲をサーボで制限しています。 ところが、この範囲を超えている場合にトルクをONにしてもうまく動かないようです。バグなのか仕様なのかはわかりませんが。
これは動作範囲を機械的な限界より少しだけ大きくしました。
・ 急にトルクが抜けるサーボがある ⇒ はんだ付け不良による断線障害
ちゃんと通電しているように見えるのに、いつのまにかトルクが抜けてまた復活する。見たところケーブルも不具合は無かったのだけど、よくよくみるとテンプラはんだでした。 見つけるのに苦労した。
あと、サーボのばたつきを抑えるためにコンプライアンスマージンを少し大きめに取るのだが、あらかじめサーボを設定しておくのではなく、制御プログラムからいちいち設定するようにします。その方がいいかなーと。
サーボが熱ですぐ落ちる件は、どうも動作不良のサーボが絡んでいたようです。 そういえばすぐ落ちる脚は動作不良のサーボの隣の脚。 サーボが落ちてトルクが抜けているところを隣の脚が支えていたので過負荷になった模様。
熱でサーボが落ちた場合に、フォローするように歩行モーションを切り替えるってのもやりたいんだけどな。
あと、STBeeに各種設定を保管しておけるようにフラッシュの操作をせねばならない。間違ってDFU消しちゃいそうで怖いな。JTAG持ってないので。
■8月6日■
シグマのプログラム整備の続き
シグマのサーボはフタバのRS601。 これでサーボの情報を取得しようとすると、コマンド送信のリターンに希望のレジスタ値を乗せて送ってくるという方法とレジスタ値取得のための命令を送る方法があります。
前者だとレジスタ値取得のための命令を送らなくても良いのだけど、リターンに載せてくるレジスタ情報の範囲が大雑把にしか指定できないのでリターンパケットが長々としてしまいます。サーボ毎に長いデータを送られてもなんなので、シグマでは後者の方法を取って、1周期(20ms毎)に1サーボから情報を得るようにしました。
これだと全部の脚の動きをリアルに取得できないのだけど、まぁ仕方ない。 とりあえず全サーボの角度情報を順繰りに取得するようにしました。 そしてリターンパケットに付属してくる警告フラグを監視して、熱でやばいサーボ、熱でダウンしたりトルクオーバーでダウンしたりするサーボの情報を取得できるようにしました。
そして、歩行の基本姿勢を変更する汎用モーションを作って基本的な実装は大体できたかな。 随分と安定してきたので高速歩行も試してみたところ、オサル君の6足サバゲ機体くらいの速度で動けるようになりました。 シグマは全方向移動ができるのでなかなか脅威です。
あとはカメラだなー。 シングルカメラならもういいんだけど、せっかくだから3カメラにしてみたいな。 もうちょっとあがいてみるか。。
■8月7日■
金曜日1日の出勤日をはさんだ夏休みが終わってしまった。
今日は主に構造設計と、ラムダのサーボ設定フェーズがどうもうまくいかないのでその部分のデバッグ。
ラムダではサーボのストレッチやスピードを動的(モーションに組み込んで)操作できるようにしているのだが、そのリターンパケットの取得がうまくいかない。 うまく行かない場合は受信フェーズ自体に入らない事から時間的な問題が絡んでいるらしい。
そうなるとデバッグが困難で、状態表示でコンソールに文字出力をさせるとタイミングが変わってしまったり。
リターンパケットの検査を強化したり、パラメータ設定コマンドの場合はウェイトを少し大きめに取ったりすることで制御ループが少し乱れる程度で済むようにはなったのだが、どうも釈然としない。
ところで、ロボコロッセオって9月のアタマ。 来週末はお盆で神戸に帰省することになっているので土日は2回しかないわけだ。 ううむうううう。 カメラは現行バージョンで諦めざるを得ないか。
■8月20日■
やっと長いトンネルを抜けました。
ここんとこ、シグマの制御をSTM32で行うためのプログラム作成を続けておりました。 サーボの監視を行うため、サーボの制御周期毎に1つのサーボからデータ取得をするというようにしたいのだけど、どうもうまく行きませんでした。
途中、帰省したりしてましたが、結構な時間をここのデバッグに費やしてしまった。
主な問題はSTM32のペリフェラルドライブの問題でした。
ライブラリのサンプルを参考にプログラムしていたのだけど、USARTを2本、SPI1本、タイマー4本を駆使し、DMAで突き放し制御しているとなかなかサンプルプログラムの記述だけではカバー仕切れません。 データシートくびっぴきで調べたり、オシロで信号確認しながら試行錯誤したり。。。
最後まで残った不具合というのが、USART2の設定によってUSART1の動作がおかしくなる場合があること。 タイマーのリロードレジスタの値によってUSART1の動作がおかしくなること。
結局の原因は、USARTをDMAで送受信処理をさせているところで、いちいちDMA許可フラグをON/OFFせねばならないこと。 それとDMA許可フラグを立てた状態ではペリフェラルの設定をいじっちゃいけないらしいこと。 前者のことはデータシートにきちんと書いていたのを守っていなかったからだったのですが、後者の方は記述がありません(みつかってないだけかもしれないけど) 処理順序を色々変えてみてやっと解決しました。
タイマーのリロードレジスタの件は、レジスタの値をちゃんと unsigned short にキャストして渡していなかったことでした。 他のレジスタ値も壊していたんだと思います。
サーボの監視の部分は、絶対必須機能じゃなくてすっとばしてもコロッセオには問題ないのだけどできるはずのことができないままスルーってできないタチなんですよね。 あと、悪路歩行には必須機能なので今後絶対に要る部分だからすっとばして先送りしたくなかったので。
あと、思った以上にサーボからのリターンパケット送信タイミングにばらつきがありました。 トルクがOFFの状態だと500~700usくらいのウェイトで安定しているのだけど、サーボにトルクが入っている状態で、コマンドを受け取った直後だと、1msから2msくらいのウェイトがありました。 24個のサーボにデータを送るのに460800baudで5ms程度で完了するのに1個のサーボからパケットを受け取るだけで2ms以上かかるわけだから話にならんです。 601って通信速度を1Mbpsにまで上げられるんだけどリターンのウェイトタイムは変わらないんだろうなぁ。
そういったわけで予定の作業が大きくずれ込んでしまったのでカメラ周りはでっちあげ状態になってしまいそうです。 自分的にはサーボ監視やらなきゃなぁと思ってたのができたので満足ですけどね。
■8月28日■
ロボコロッセオ前の、最後の土日だったのですが、土曜日は急な仕事で出勤。 慣れない仕事だったりその足で秋葉原に立ち寄ったりして疲れちゃったりで土曜日は作業できず。
そして本日、日曜日が最後の休日となりました。 いくつ積もうかと悩んでいたカメラシステムは、色々不安定なところが残るので、 結局1つにし、アプリは uvc_streamer にしました。 ひとつになった代わりオートフォーカスです。 そして電源入れれば立ち上がるようになっているので比較的安心。
mjpg_streamer にはudpを使ったプラグインも用意されているので、通信状態が悪いときでもデータがフンづまったりしないので有利じゃないかと思っていたのですが、用意されているクライアントが静止画を受信できるだけのアプリだったので諦めました。 ストリーム系の一般のクライアントと通信確立させるようにするにしても、自分でクライアント作るにしても、 これは、、、敷居が高いな。 ということで当面ボツ。
そして、ビーグルボード側の設定をし、カメラで操縦の練習でもしてみようとしたところ、、、、あれ?サーボが反応しない?? なんで???
調べたところ、電源ラインに150kHzくらいの周期でスパイクノイズが入る。 これDCDC電源のノイズですね。 マイコンだけだと発生しないけど、ビーグルボードの電源を入れると発生します。 3Aまで取れる電源なんだけどなー。
マイコンもビーグルボードもノイズがあっても動いてます。 動かないのはサーボ。 サーボの電源ラインはグランドだけはDCDC電源と共通なんだけど、距離があるのでノイズはほとんど気にならない。 なのにマイコンの電源はふらふらしてるのでサーボの信号がエラーだらけになるらしくってさっぱり応答してくれません。
スパイクノイズの発生はアースパターンの引き回しとショットキーダイオードの性能で決まるらしい。 出力段の平滑コンデンサをセラミックにするというのも効果があるかも(ただし発振する恐れもある) ショットキーも大容量のセラミックコンデンサも手持ちがないのでアースパターンの強化と、負荷供給部分にノイズ対策にコンデンサを入れたのだけど普通のノイズだからほとんど効果なし。 というか、ビーグルボードにUSBデバイスがなければなんとか動くんだけどフル実装だとさっぱり。 ノイズは負荷に連動してるんですね。
もともとの原因はDCDCの発振出力にものすごいオーバーシュートが出てるのでそのせいだと思うのだけどショットキーダイオードの選定をミスったかなー。。。 DCDCのチップ選定ミスかなー。 とりあえずショットキーを何種類かと大容量積層セラミックをRSコンポーネントに発注しておきました。 間に合うかな?
間に合わなかったときのために、電動ガン用の電源からマイコンに電源供給。 これでサーボへはノイズが行かなくなります。 電動ガンのモーターノイズは気になるほどじゃないからこっちの方がマシだろう。
結局、メカ・ハード的には今日のうちに完成させようとしていたのに、さっぱり作業は進みませんでした。 それにしてもこないだまではどうして動いていたんだろう。 ハード的にはRS485にターミネータを入れたくらいだし、入れて通信エラーが激減したんだけどな。
カメラが安定しないのは電源ノイズだったんだな。
今夜はもうちょっとがんばろうかな。
■8月29日■
シグマのコントローラはSTM32なので3.3V系です。 ADCの入力可能電圧はVref-からVref+なのですが、BGAタイプとかLQFPタイプでなければピンが出ていないので、事実上0から3.3Vが測定範囲となります。
ロボでサバゲの被弾センサーは太陽電池の起電力を測定して判断しています。コンパレータを使った外部回路でデジタル信号にしているボードも用意されているのですが、せっかくADCがあるのにわざわざ外部回路持つのもなぁ、、、ってことで太陽電池の電圧を測定していました。
ところが、太陽電池はモノによって起電力が違うものがあり、同じ光量でも電圧が高くなるものがあるようです。問題は軽く3.3Vを超えるものしか手元にないということで動作がうまくないようです。 STM32のADCは10チャンネルくらいを切り替えて測定しているようですが、印加電圧がVrefを越えると隣のチャンネルの測定値にも影響を及ぼすようです。(正確には未確認です)
そこで、パッシブなデータを使うのではなくアクティブな方法で光量測定をするようにします。 まぁ、センサーにCDSを使うだけなんですけどね。
CDSは光が当たると光量に比例して抵抗値が少なくなるセンサーです。 CDSに流れる電流値をオペアンプで電圧値に変換することで測定電圧がADCの測定可能電圧範囲を逸脱しないようにします。
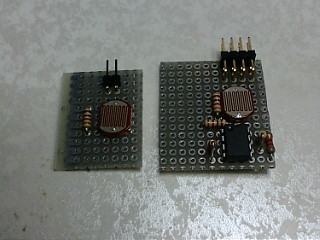
右のが一つ目のセンサーで親基板。 左のが二つ目のセンサーです。
ちなみにこのサイズのCDSは1個150円 オペアンプはなんでもいいんだけど、これは1個150円のやつ。
明日、被弾センサーボックスに実装して実験してみて感度に問題がなければ、静岡はこれで行きたいと思います。
■9月5日■
ホビーロボットコロッセオに行ってきました。
各地に多大な被害を与えた台風12号の影響で、行きも帰りも高速道路の通行止めにあってしまいました。 行きは早めに出たし、朝だったので交通量も少なく問題なかったのですが、帰りは御殿場から通行止めになっており、246の大渋滞に巻き込まれてしまいました。
途中休憩でメールを確認すると、みっちーさんが自宅に到着したという投稿がサバゲMLにされてる。。。 四国まで帰るより遅いのか。。 家についたのは日が変わったあとでした。
コロッセオは、まぁ予想どおりSF大会の人たちはこちらに流れてくるというわけでもなく盛大な合宿状態でしたが、楽しかったです。関西の人たちはあまり会う機会がないので久しぶりの人、お初の人などたくさん話ができてよかったです。
出場した競技は「ロボでサバゲ」だけだったのですが、今回は前回までの問題をほぼ解消してきたにも関わらず、まだまだ問題がたくさん発生しました。 ゲームでやられるのは仕方ないのだが、6ゲーム出場したうちの1回はトリガーコネクタが外れて電動ガン動作不能に。 2回はマイコンが暴走して動作不能に。 マイコンの暴走に関しては原因追及がむずかしそうなのでWDTを仕込む方向で。 使ったことないんだけどな、WDT。
課題整理
■問題点
・マイコンのリセットボタンが必要
・DCDCコンバータのノイズ
・電動ガンのコネクタが抜けやすい ⇒ コネクタはロック付きにして、ONOFFスイッチをつけたい
・マイコンの暴走 ⇒ とりあえずウォッチドッグを入れておく
・歩容生成 フル前進からフル反転すると、足の可動範囲を超えてしまいおかしくなる。(高さを守った代替値生成を実装したい)
・ビーグルボードに緩んだネジが落っこちる可能性あり。防護方法を検討する。
■作り込み
・バッテリー収容・固定
・レーザーサイト取り付け
・受信機搭載 ⇒増槽の中に入れちゃう 無線LAN操縦にする
・被弾LED表示
・足先⇒部品を用意したけど組み込まなかったユニバーサルジョイントがあるのだが、ダメかも。スーパーボール状のものを足先端につける方法を考える。
・モーション再生機能
■良かったところ
・バッテリー交換用外部電源供給
・カメラマウントは問題なかった
・高速歩行 ⇒ オサル君のブタンクより早く動けた。(ゲームではやられっぱなしだったけど)
・無線LANカメラは比較的安定していた。TCP通信でパケットがたまるとカクカクすることもあり。やはりUDPにしたい。
・CDSを使った被弾センサー
■ゲーム
・広いフィールドはよかった
・番地は読む余裕はなかった (作ってもらったのにスイマセン)
・ストラクチャはロボットが押しても動かないようにならないものか
・被弾弾数はもっと増やしても良いのでは 3発⇒5~6発
■前回の気づき一覧
済 無線LANの不安定さを解決 → 電動ガンのノイズ対策
・ UVC-streamerをストリーム化できないか?
済 電源周りの見直し 電池のパラ化と待機時には安定化電源から電源供給できるようにできないか。 → 安定化電源からのラインに逆流防止ダイオード入れれば良い? バッテリー側には入れたくないので、バッテリー側にスイッチを入れる。 両方接続する場合はバッテリー側のスイッチを切っておくようにすれば長時間バッテリーに電流が流れ込むことは(運用で)防げるはず。
・ バッテリーの交換方法を再検討。 上からは無理っぽい。 せっかく2個まで格納できるようにしたのに使えず。
・ ビーグルボードの付けはずし構造 再検討
△ ビーグルボードのUSBポートが全部使えるように再検討
△ CPUブロックから上部への配線方法再検討
・ リセット状態では電動ガンが発射状態となる。 論理を反転した方が良いか。 (現状は正論理)
・ バッテリーの過放電防止機構を検討する。 CPU用リザーブバッテリーとメインバッテリー切り替えはできないか?
・ つま先のブーツを付け外し可能なものにする。 (今はビニテ)
済 電動ガンの電源は別にしたい → ノイズ対策と、5Vだとちょっと弱い。
当面不要 弾倉をABSで作り直す。 スチロール板はいまいちの気がする。
不要かも 操縦をアナログ指示しているのをやめる。 思い通りに進まないので。。
・ 方位指示はちょっとディレイしてアナログスティックのふらつきを排除する。 ブルブルしすぎるので。。
・ チームフラッグを取り付けられるようにする。LEDも対応する。
・ マイコンのリセットボタンを作る。 (作らないと困るかも、 と思っていたが今回は困らなかった)
今回のフィールドはとても広くてたのしかったので、予定ゲームが終わって空き時間になってからもエキシビジョンゲームをやろうってことになったのだけど、抜けたサーボコネクタがうまくはまらなくて四苦八苦しているとシグマのボディから煙が。。。 でも、分解するのはたいへんなので帰って修理することにして、店仕舞いしました。
今日、仕事から帰って早速煙の出所を修理しようと分解したのだが、被覆がとけた場所が見当たらない。ネジが一本外れていたからそいつがどこかに接触してショートでもしたのだろうか。煙出るくらいだと壊れちゃってもおかしくないんだけどな。 ビーグルボードも無事のようです。
つまり、ビーグルボードの上にあるねじは緩んで落っこちないようにしないとまずいね。
さぁ、今回の気づきを改修しつつ、軸足をラムダに置いていきたいと思います。 ビーグルボードもう一台発注しよっと。
■9月10日■
異様な盛り上がりを見せるFaceBook。 チャットができるのがいいのかな? 複数人数でのチャットにはコメント欄での会話が便利です。 「いいね!」の応酬もけっこうキモチ良いです。
ということでこないだふとした投稿で始まったFeceBook上での会話。 スレッドは訳あって消してしまったけどもったいないので編集して掲載。 登場人物はよっしー、網ちゃん、わたくししまけんの3名です。
夜な夜なこんな会話をすればすごいアイディアが浮かぶかも。 会話している間は手が止まってるんですけどね。(^_^;)
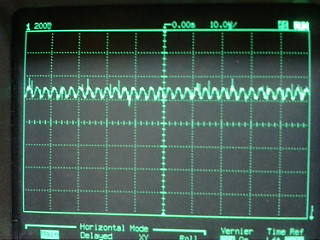
注文していたBECが届いたので波形観測
まず、自分で作ったスパイクだらけのDCDC電源の波形
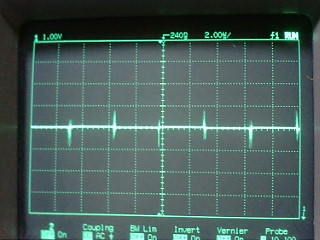
スパイクが1V近くも!
で、期待のBEC。 値段から言ってそんなに期待はできないなとは思ったが、

これはもうリップルとは言わないか。 1Vp-p こっちの方がましかなー。 シグマを動かしてみていないのでわかりません。
いま注文しているDDCモジュールが到着したら比べてみます。 そいつが一番期待できるはず。 これだと今の段階で組み込む気持ちにはならないなぁ。スパイクと違ってリップルなら部品追加で抑えられるはずだから対策して採用の可能性も少しだけアリ。
7月から掲示してたKRS-6003HV譲りますの件はとうとう完売しました。予想通り2個ずつ売れました。これでしかかり在庫が解消してスッキリです。 最後の2個を買ってくれたのはフロさん。 引渡しの折りに先日のロボコロッセオの話やもろもろの話をしていたのですが、Frostyがあの広いフィールドで思いっきり走ってる姿を見たかったなと。
あと、前回のROBO-ONE on PCで優勝されたドクターゲロさんが会場に見学に来ていました。 色々会話する中で、自転車を走らせてるんだーって言ってたのがこれらしい。 もう出来てるんならもう少し突っ込んだこと聞けばよかったなー。研究中かと思ってた。(>_<)
■9月18日■
「もんじゃー!」 ということで、みっちー東京出張お疲れ様もんじゃに行って来ました。 DreamDriveのみっちーさんとはロボコロッセオでのロボでサバゲでご一緒したのが初顔合わせだったのですが、近々出張があるということでその時は飲みに行きましょうってことで静岡で別れたので、その流れでの開催です。
実は当日(16日)は私めの誕生日でして、先に誕生日を迎えた石川さんと、更には8月に誕生日だったトビーさんも含めて祝っていただきました。
 みっちーからいただいたさぬきうどん さぬきうどんは出張行った時食べたけどすごくうまいです。
みっちーからいただいたさぬきうどん さぬきうどんは出張行った時食べたけどすごくうまいです。
 くままさんからいただいたおなかがクリーナークロスになってる銀の犬(^。^) 使ったら汚れるやん。
くままさんからいただいたおなかがクリーナークロスになってる銀の犬(^。^) 使ったら汚れるやん。
 そして、トビーさんからいただいたコロ助のフィギュア。 どんなロボット目指しているの?って聞かれるとコロ助と答えてます。
そして、トビーさんからいただいたコロ助のフィギュア。 どんなロボット目指しているの?って聞かれるとコロ助と答えてます。
友達で平和で役に立たない愛すべきロボットです。 そんなロボットを私は作りたい。。。
 これはトビー・石川・しまけん用にくままさんが用意してくれたカップケーキ。 プリンベースです。 オレがプリン好きだってこと知ってたんですね。 >くままさん
これはトビー・石川・しまけん用にくままさんが用意してくれたカップケーキ。 プリンベースです。 オレがプリン好きだってこと知ってたんですね。 >くままさん
もんじゃの会では例によって激しいクロストークで何話したかわからんのですが、元々の目的のみっちーとの技術的な話はそこそこできました(#^.^#) 打倒V-sidoでがんばってください>みっちー(^。^)
その後、「徹夜でカラオケ」が勃発したんだけど、この3連休で作業進めたかったし、前日の金沢出張の夜に散々歌ったのでおとなしく帰ってきました。
とにかく、FACEBOOKとツイッター含め、こんなにたくさんの方に祝いの言葉をいただいたのは生まれて初めてかも(^^♪ ありがとうございました。
明けて昨日と今日、ラムダをコロ助に近づけるべくずーっとCADに向かっています。まだ作業終わってません。 今回搭載するカメラはロジクールのWebカメラをばらしたものなので基板の形状がへんちくりんです。それも二つ載せなきゃならないので「かわいく」とか「かっこよく」とかもう無理。 なんとか最低限の機能を盛り込んで設計してみました。
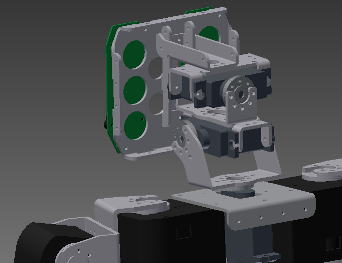
いわゆる萌え軸ついてますけど萌えるためじゃなくて、歩行時の画像の安定化を図るのに必要かなと思いまして今回は積みました。 チルトとパン(カメラ画像を基準に軸名を振ってます)で正面以外を見るとロール軸が回転してしまうので画像を回転処理しなければならないのだけど、ロール軸があればその分逆に回転させることで計算量が減るという利点もあります。
あとは、背中にバックパックイメージでビーグルボードを積めば大体できあがりなんですけど、どうしても大仰になってしまうので出来るだけに簡素に確実に固定できるような構造を検討中です。
来週の練習会までに作りたかったけど間に合わないかなー。
■9月23日■
少し前に、注文していた電源モジュールが届きました。 RSコンポーネントでの仕様が[689-4738]村田製作所の電源モジュールです。 組み立てていたラムダの上半身も次の部品待ち状態になったので、波形を見てみます。
表面実装モジュールなので端子にケーブルをはんだ付けして無理やりブレッドボードで組んでいます。 抵抗は出力電圧調整用です。 このモジュールで出力は5Aまで出せます。すげー。
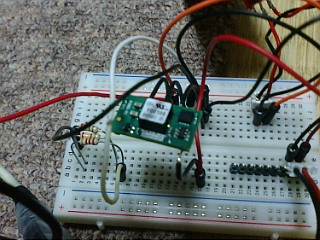
これが無線LANモジュール、USBカメラを二つつけた状態での電源波形。 ちらちらと出ているスパイクはコンソールをつないだら出てきました。 リプルは、200mV/devでの表示なので100mVp-pくらいかな
いいですねー。 採用です。 表面実装モジュールだからユニバーサル基板にはんだ付けするのが難しかったけど、いままでの電源基板サイズに取り付けてさっそくラムダに組み込みました。
ラムダにもビーグルボードを積むので、バッテリー交換時に電源を落とさなくても済むように外部供給電源端子をつけたいのだけど、相当ばらさなくちゃならないためその作業は見送り。 まだまだ運用には程遠いので、何かの機会で分解することもあるだろうからその時にします。
↓ ラムダの頭部の制御に使うコンドーのチビサーボです。 オールメタルだし、サーボホーンもアルミタイプがあるし、薄くて小さいし、ICS3.0が使えます。 アタマのサーボは負荷は軽いのだけどこけた時の衝撃が半端じゃないのでプラギアだとすぐにかけてしまいます。 メタルにすりゃ解決かというとそういうわけではないのだけど、その他の対策はまた別途。
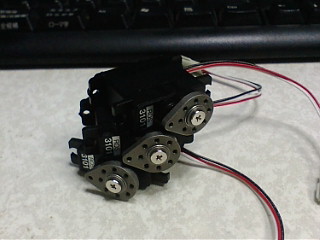
まこ君から買ったサーボ(DS450だっけか)もトルク的には十分とは思うし、コレより軽いし、ギアもメタルなんだけど、そっちでは手を作るつもり。 しかし、小径アルミホーンって1個1000円もする。 高い。。。(ーー;)
DS450はホーンが問題なんだよなー。 こけるたびにセレーションなめちゃいそう。
ラムダの頭部の部品が届いたので早速組み立て。 基板むき出し状態だけど、ステレオカメラでパン(左右回転)・チルト(上下回転)・ロール(視線回転)をつけました。
こないだの3連休で設計したんだけど、チルト角が物足りない。下向いたままパンできない。

ロール軸つけるとやはり表情が出る。(*^_^*) 表情使うほどのアプリができるのかって問題のほうがでかいけど。

組み立ててみたのだけど、ROS-3101って片持ちだと使えない感じ。 軸が弱よわしくて多分すぐに壊れちゃう。 パン軸だけは2552辺りに取り替える必要がある。
更にはチルト軸部分のブラケットに衝撃吸収?クラッチ?なんてのかこけたときに逃げる構造が要るので追加設計。
昨日の練習会で、こけた時に受身を取る方法を色々考えた末、肩がだっちゅーの関節になってるってことで胸にクッションつけたらいいんじゃないかって話になったんだけど、よく考えたらオッパイつけたらせっかくチルト軸つけてるのに下が見えないから却下です。
ちなみに練習会で聞いた話ではDS450もすぐ焼けちゃうとか。 ちっさいサーボはなんにしても難しいです。