
奐敪擔帍(35)
仭俆寧侾擔仭
崱擔偐傜俆寧丅丂偍傕偄偭偒傝榖偺搑拞偩偗偳夵儁乕僕偟傑偡丅
懌棤僙儞僒乕偺僨乕僞傪僼傿乕僪僶僢僋偡傞偨傔偵SEMB1200A偵庢傝崬傓丅
STBee-MINI懁偺嬻偒偑UART偟偐側偄偺偩偑丄SEMB懁偱嬻偄偰偄傞偺偼RS485巇條偲側偭偰偄傞UART2偟偐嬻偄偰偄側偄丅丂尩枾偵偼僒乕儃憖嶌偵巊偭偰偄傞1WireUART偑1億乕僩嬻偄偰偄傞偑丄奐曻偡傞偺偑柺搢側偺偲崱屻偺僒乕儃憹愝偺偨傔偵嬻偗偰偍偒偨偄偺偱丄丄丂偦偆尵偭偪傖偆偲RS485傕嬻偗偰偍偒偨偄側偀丅
嶐擔傑偱偼PC偵偮側偄偱偨STBee偺弌椡傪RS485 僪儔僀僶乕傪夘偟偰SEMB偵愙懕丅傕偆偩傫偩傫偲偖偪傖偖偪傖偵側偭偰偒偨丅
庢傝崬傫偱儌僯僞乕偟偰傒偨偲偙傠丄僨乕僞棊偪偑昿斏偵婲偙傞丅丂側傫偱偙偺掱搙偱僨乕僞棊偪偑婲偙傞傫偩丠丂捠怣懍搙偼115200baud偲戝偟偰懍偄傢偗偠傖側偄丅
峫偊傜傟傞偺偼儌僯僞乕偺偨傔偵庴怣僨乕僞傪乮庴怣懍搙傛傝抶偄懍搙偱乯僐儞僜乕儖弌椡偟偰偄傞偲偙傠丅丂僙儞僒乕僨乕僞偺検偑昞帵検傪挻偊偰偟傑偭偰偄傞偺偐傕偲巚偄丄僨乕僞昿搙傪棊偲偟偰傒偨偑僨乕僞棊偪偺嬶崌偼曄傢傜側偄丅丂SEMB懁偺張棟傪妱傝崬傒偱傗偭偰傒傞偐側乕丅妱傝崬傒梫場傪憹傗偡偲怓乆柺搢偵側傝偦偆側偺偱旔偗偨偐偭偨偺偩偑丅
ZMP偺僼傿乕僪僶僢僋偼傗偭偮偗巇帠偠傖側偄偺偱偙偺楢媥偱偙側偦偆偲偼巚偭偰偄側偄偺偱丄僴儅傝偦偆側偲偙傠偼旔偗偰徚壔検廳帇偱偙側偄偟偨偄偺偩偑丅
偙偙偱僴儅傞梊掕偼側偐偭偨傫偩偗偳側偀丅
仭俆寧俁擔仭
偊偊丄僴儅偭偰傑偡丅丂UART偺妱傝崬傒張棟偵丅
偲偵偐偔UART偺妱傝崬傒傪摦偐偡偲怓乆偲摦偐側偔側傞丅丂挷傋偰偄偔偲丄UART偼丄UART1/UART2/CSI偱摨偠妱傝崬傒僠儍儞僱儖傪巊偆偺偩偑丄CSI偼妱傝崬傒偺僨傿僙乕僽儖偑偱偒側偄傜偟偄丅丂側偺偱丄傑偢偼CSI偺妱傝崬傒傪姞傝庢傝傑偡丅丂偱傕丄側傫偱CSI偺妱傝崬傒傪僨傿僙乕僽儖偱偒側偄傫偩傠偆丅
偡傞偲丄傏偪傏偪偲UART2偱偺庴怣偑偱偒傞傛偆偵側偭偰偒偨偺偩偑丄妱傝崬傒偱張棟偟偰偄傞偺偵儊僀儞儖乕僾偱億乕儕儞僌庴怣偟偰偄傞帪傛傝傕暥帤棊偪偑懡偄丅丅丅丂偄傗丄傛偔尒傞偲摨偠僨乕僞傪2搙庴怣偟偰偄傞丅丂儅僯儏傾儖傪挷傋傞偲丂庴怣僨乕僞偺懚嵼僼儔僌偑偳偆偄偆傢偗偐傢偐傜傫偑丄庴怣偑姰椆偡傞慜偵僼儔僌偑棫偭偰偟傑偆傜偟偄丅丂偦偙偱僼儔僌偑棫偭偰偐傜偪傚偭偲偩偗懸偭偰偐傜庴怣偣偹偽2廳庴怣偟偰偟傑偆偲丅丂偪傚偭偲偩偗偲偄偆偺偼嵟戝偱僗僩僢僾價僢僩暘丅丂側偺偱丄115200baud偱捠怣偟偰偄傞偺偱9us傎偳丅丂偱傕丄僂僃僀僩傪擖傟傞偲2廳庴怣偑傂偳偔側傝傑偡丅丂傢偭偐傜傫側乕丅丂偝傜偵丄傆傓乕乕偲擸傫偱偄傞偲丄UART2偼FIFO偑OFF偵側偭偰偄傞偙偲偵傗偭偲婥偯偔丅丂仈偩偭偰丄UART1偼FIFO偼ON偵側偭偰傞傫偱偡傕傫丅丅丅
偙傟偐乕丄偦偆偩傛側偀丅偲偐巚偄側偑傜FIFO傪ON偵偟偰摦偐偡偲丄傑偭偨偔庴怣偟側偔側偭偰偟傑偭偨丅丂偄傗丄嫇摦偑巚偄捠傝偵側傜側偄丅懡廳妱傝崬傒偵側偭偰偟傑偭偰偄傞偺偐丠
偦傠偦傠弌偐偗傞帪娫偑偣傑偭偰偒偨偺偱敿偽掹傔婥枴偵僜乕僗傪挱傔偰偄傞偲丄丄丄偁傜丄儊僀儞儖乕僾偱偺庴怣張棟傕惗偐偟偰偨丅丂偦偆偄傗嶐擔丄憖嶌儈僗偱STBee-MINI懁偵12V傪報壛偟偰偟傑偭偰丄摦嶌妋擣偺偨傔偵儊僀儞儖乕僾張棟偵栠偟偨偺偱偁偭偨丅丂偡傞偲丄擇廳庴怣偼偙偄偮偺偣偄偐丠丂仈捠怣儗乕僩偑廫暘偵掅偄偲塭嬁偟偰偔傞偲巚傢傟傞丅
偲偄偆傢偗偱丄傗偭偲UART2傪妱傝崬傒張棟偱憖嶌偟偰僙儞僒乕儃乕僪偐傜偺僨乕僞庴怣偑偱偒傞傛偆偵側傝傑偟偨丅
峫偊偨傜丄FIFO傪ON偵偟偰丄億乕儕儞僌庴怣偡傝傖偄偄偺偐傕丅丂傑丄偙偆偄偆偺偼妱傝崬傒偺曽偑偄偄偺偱偙傟偱峴偒傑偟傚偆丅丂傑偩彮偟庴怣偵幐攕偡傞偺偩偑丄僞僀儅乕妱傝崬傒偲僙儞僒乕偐傜偺妱傝崬傒偺偳偪傜偺桪愭搙傪忋偘傞傋偒側偺偐偪傚偭偲峫偊偰張棟偡傞偙偲傪峫偊傛偆丅丂偁偲丄僙儞僒乕儃乕僪偐傜偺僨乕僞偵僠僃僢僋僒儉偲偐偮偗側偄偲偹丅
偝偰丄偙偺愭偼儔儉僟偵僙儞僒乕梡儅僀僐儞傪搵嵹偟偰偐傜偵偟傑偡丅丂僶儔僢僋偺傑傑偱儘儃僢僩摦偐偟側偑傜偺奐敪偼柍棟側偺偱丅丂僙儞僒乕梡儅僀僐儞傪愊傓応強偑柍偄偺偱崢晹偺峔憿傪尒捈偦偆偐偲巚偭偰傑偡丅丂偮偄偱偵僕儍僀儘偲壛懍搙僙儞僒乕傕愊傕偆丅
仭俆寧係擔仭
崱擔偼僔僌儅傪摦偐偡丅
僔僌儅偼丄儔儉僟偺儌僯僞乕僜僼僩偲偱偒傞偩偗僜乕僗傪嫟梡偡傞嶌嬈傪恑傔偰偄傞搑拞丄偝傜偵埑椡僙儞僒乕偺摦嶌妋擣偺偨傔偵僜乕僗傪偄偠傝夞偟偨偲偙傠側傫偩偐摦偐側偔側偭偰偟傑偭偰偄偨偺偩丅
僐儞僜乕儖偑傠偔偵摦偐側偔側偭偨傝丄僐儞僩儘乕儔偑偝偭傁傝摦偐側偔側偭偰偄偨傝偱偳偭偐傜庤傪偮偗偰傛偄傗傜敾傜側偄忬懺偩偭偨偺偱丄傑偲傑偭偨帪娫偑庢傟傞傑偱曻抲偟偰偄偨偺偱偟偨丅
寢嬊丄僐儞僩儘乕儔偺僜乕僗嫟梡偺偁偍傝偲丄儔僀儞僄僨傿僞偺僜乕僗嫟梡偺偁偍傝偲丄ADC晹暘傪揔摉偵廋惓偟偨偁偍傝偱摦偐側偔側偭偰偄偨偺偱偟偨丅丂偮偄偱偵儘儃偱僒僶僎偱摦偐偟偰偄傞帪偐傜僫僝偱偁偭偨丄揹尮ON偱僒乕儃偑ON偟偰偟傑偆尰徾偺僶僌傕庢傟傑偟偨丅傆偆丄旀傟偨丅
偲偄偆傢偗偱柍帠僔僌儅偑摦偒弌偟傑偟偨丅丂偁偲偼丄柍慄僇儊儔傪愊傓偨傔偺岺嶌傪偡傞偺偩偗偳丄崱搙偼價僯僥偱屌傔傞傫偠傖側偔偰偪傖傫偲嶌傝偨偄側偀丅
偡偖偵擬傪帩偭偰偟傑偆懌偺晅偗崻偺娭愡偵僥儞僔儑僫乕傪擖傟偰帺廳傪嶦偡傛偆偵偟偰傒偨偺偩偗偳丄傑偀傑偀岠壥偼偁傝偦偆偱偡丅帺廳偱偺僒乕儃偺偨傢傒傕彮側偔側偭偨傛偆偱丄曕峴壒偑彮偟惷偐偵側偭偨傛偆偱偡丅
柧擔偼偲偆偲偆UVC僇儊儔偵庢傝慻傓梊掕丅
仭俆寧俆擔仭
崱擔偼楢媥嵟廔擔丅丂傑丄堦擔弌嬑偟偨傜搚擔側傫偱偡偗偳偹丅丂懡暘媥擔弌嬑偼偟側偔偰傛偄偼偢丅
UVC僾儘僌儔儉偺挷嵏偲丄儔儉僟偵僙儞僒乕儃乕僪傪搵嵹偡傞偨傔偺峔憿愝寁偺尒捈偟傪丅丂偮偄偱偵僔僌儅偺儃僨傿峔憿傕偪傚偭偲尒偨傝偟偰偰偳偪傜偐偲偄偆偲峔憿愝寁偺曽偵斾廳偑偁偭偨堦擔偱偟偨丅
堦擔嵗偭偰偨偺偱尐傕崢傕僶僉僶僉偵側偭偰偟傑偭偨丅
峔憿偺曽偼戝懱屌傑偭偨偺偩偗偳丄僙儞僒乕儃乕僪傪搵嵹偡傞梊掕偺崢晹暘傪曄峏偡傞偲忋敿恎偑庢傝晅偐側偔側偭偰偟傑偆偺偱偳偆偟偨傕偺偐丅丂忋敿恎偺峔憿偺尒捈偟傕峫偊偰偄偰愝寁拞側傫偩偗偳丄偦偭偪傪懸偭偰偄傞偲帪娫偑偐偐偭偰偟傑偄偦偆側偺偱傾僟僾僞偱傕嶌偭偰崱偺忋敿恎傪搵嵹偱偒傞傛偆偵偟傛偆偐側丅
UVC僾儘僌儔儉偺曽偼丄僜乕僗撉傫偩傝怓乆帋偟偨傝偟偰丄戝懱傢偐偭偰偒偨丅丂僇儊儔擇偮偺摨帪僉儍僾僠儍乕偼傑偩枹僩儔僀偩偗偳壗傗傟偽傛偄偐偼敾偭偰偒偨偺偱廡枛偵偼壗偐偱偒偦偆側婥偑偟偰偒偨丅
夋憸張棟傪偡傞娭學忋丄JPEG傗傜MJPEG偩偲庢傝埖偄偵晄曋側偺偱YUVU宍幃偱張棟偟偨偄丅丂偡傞偲崱搙偼儌僯僞乕偑偱偒側偄丅丂YUVU->MJPEG偵偟偰僗僩儕乕儈儞僌偭偰偲偙傑偱峴偔偵偼帪娫偐偐傝偦偆偩側丅
丂
偙偺僑乕儖僨儞僂傿乕僋偼傎偲傫偳弌偐偗偢偵嶌嬈偽偭偐傝乮偭偰柊傝偙偗偨傝偩傜偩傜僥儗價傪尒偰偨帪娫傕憡摉偩偭偨偗偳乯傗偭偰偰側偐側偐廩幚偟偰傑偟偨丅丂儘儃僇僢僾娤偵峴偙偆偐偲傕峫偊偨偗偳僗儖乕偟偰傛偐偭偨傫偩傠偆側丅丂乮儘儃僇僢僾偑偮傑傜側偄偲偄偆堄枴偱偼側偄偱偡傛乯
巇帠偺崌娫偵傗偭偰偰僌僞僌僟偵側偭偰偨彅乆偑彮偟偢偮宍偵側偭偰偒偨偺偱傗傞婥傕弌偰偒傑偟偨丅丂堷偒懕偒婃挘傝傑偟傚偆丅
仭俆寧俈擔仭
UVC僾儘僌儔儉傪挷嵏拞丅
fswebcam偲偄偆惷巭夋傪僉儍僾僠儍乕偡傞僾儘僌儔儉傪巊偭偰挷嵏偟偰偄傑偡丅丂偙偺僾儘僌儔儉傪夵憿偟偰擇偮偺僇儊儔偺摨帪僉儍僾僠儍乕偺僥僗僩傪偟傛偆偲偄偆帋傒偱偡丅
摨帪偵僉儍僾僠儍乕偡傞偵偼擇偮偺僨僶僀僗傪摨帪偵奐偄偰僩僩儞偲擇偮傪弴偵僉儍僾僠儍乕偡傞丄偲偄偆宍偱峫偊傑偡丅丂摦嶌偑懍偄偲擇偮偺僇儊儔偺夋憸偑帇嵎埲忋偺嵎偑偱偒偰偟傑偭偰傑偢偄偺偱偡偑丄摨婜偝偣傞偺偼柍棟偭傐偄偺偱偙傟偱変枬丅
儘儃偱僒僶僎梡偵攦偭偨儘僕僋乕儖偺C910偲C510偑偁傞偺偱擇偮傪摨帪偵偮側偄偱僥僗僩偱偡丅
偡傞偲丄擇偮栚偺僇儊儔偺僨僶僀僗傪僆乕僾儞偡傞偲偙傠偱幐攕偟傑偡丅丂挷傋傞偲丄僆乕僾儞偟偨屻偵僗僩儕乕儈儞僌傪ON偵偟偨偲偙傠偱幐攕偟偰偄傞傛偆偱偡丅丂偱偼僗僩儕乕儈儞僌巊傢側偒傖偄偄偠傖傫偲傕巚偊傞偺偱偡偑丄扨弮側儕乕僪偱傕幐攕偡傞傜偟偄丅丂梫偡傞偵擇偮傪摨帪偵巊偊側偄両
偱傕丄僱僢僩偱挷傋偰傒傞偲暋悢摨帪偵摦夋庢摼偼偱偒偰偄傞傜偟偄丅丂側偺偱壗傜偐偺曽朄偼偁傞偼偢丅丂OpenCV偱偱偒偨偭偰偺偑偁偭偨偺偩偗偳丄OpenCV傪巊傢偹偽側傜側偄偺偐丠
怓乆挷傋偰傒傞偲丄USB偺懷堟傪巊偄愗偭偰偄傞偺偑尨場傜偟偄丅丂側傜偽偲儗僝儕儏乕僔儑儞傪巚偄愗傝彫偝偔偡傟偽偆傑偔偄偔偐傕偲巚偭偰帋偟偰傒偨傜崅夝憸搙偺C910偼曉帠偝偊曉偭偰偙側偔側偭偰偟傑偭偨丅
傕偟偐偡傞偲丄懷堟埑敆偺尨場偼C910偺崅夝憸搙偵偁傞偺偱偼丠丂偲丄晹昳敔偐傜愄1500墌偱攦偭偨Web僇儊儔傪偮側偄偱傒傞偙偲偵丅丂偡傞偲丄摿偵側傫偺庤傪壛偊傞偙偲傕柍偔擇偮偺僇儊儔偱摨帪偵僨僶僀僗僆乕僾儞偟偰僉儍僾僠儍乕偑偱偒傞傛偆偵側偭偨丅
丂
帋偟偵100僼儗乕儉偺僉儍僾僠儍乕偺帪娫傪挷傋傞偲丄丄丄6昩丅丂6fps偟偐弌偰側偄丅丂偊偊偉乣丄偦傫側乕丅丅
偄傗懸偰傛丅丂埨暔偺僇儊儔偼埨暔偩偐傜偙偆側傫偠傖側偄偺偐丠偲巚偭偰屄暿偵挷傋偰傒傞偲丄C910偑25fps丂C510偑24fps丂偦偟偰僶僢僼傽儘乕偺埨暔偑6fps
偙偺埨暔偑懌傪堷偭挘偭偰偨傫偩側丅丂梊掕偱偼C510傪擇偮偮側偖偮傕傝偩偭偨偺偱壜擻惈偼偁傝偦偆偱偡丅丂埨暔偵斾傋傞偲C510偼惈擻崅偄偺偱擇偮摨帪巊梡偑偱偒傞偐偳偆偐怱攝偱偼偁傞偗傟偳丅
憗懍傕偆傂偲偮C510傪攦偭偰帋偦偆偲偟偨傜丄傾儅僝儞偱攦偊側偄丠丠丂側傫偱丠丂壙奿僐儉偱挷傋傞偲堦偮栚傪攦偭偨帪偵斾傋偰憲椏崬傒偱1000墌傕崅偔偮偄偰偟傑偆丅丂恖婥偱昳愗傟側偺偐側乕丅丂2010擭廐敪攧偺怴偟偄惢昳傜偟偄偐傜傕偆偪傚偭偲條巕傪尒偰傒傞偐丅
仭俆寧俉擔仭
崱擔傕嶐擔偵堷偒懕偒UVC僾儘僌儔儉偺挷嵏丅
崱擔偱僑乕儖僨儞僂傿乕僋偼姰慡偵廔傢傝丅丂偢偭偲婘偵偐偠傝偮偄偰偄偨偨傔丄旀傟傕僺乕僋偵側偭偰偄傞丅楢擔屵慜3帪傑偱偍偒偰偨偺偩偗偳丄嶐栭偼侾帪崰偐傜柊偔偰偳偆偟傛偆傕側偔偰憗傔偵晍抍偵擖偭偨傝丅丂崱挬傕丄俈帪偵婲偒偨偺偼偄偄偗偳挬斞怘偭偨傜僜僼傽乕偱侾帪娫偔傜偄怮偰偟傑偭偨丅
偱傕丄崱擔偱堦楢偺媥傒偼嵟屻側偺偱婃挘傞丅
丂
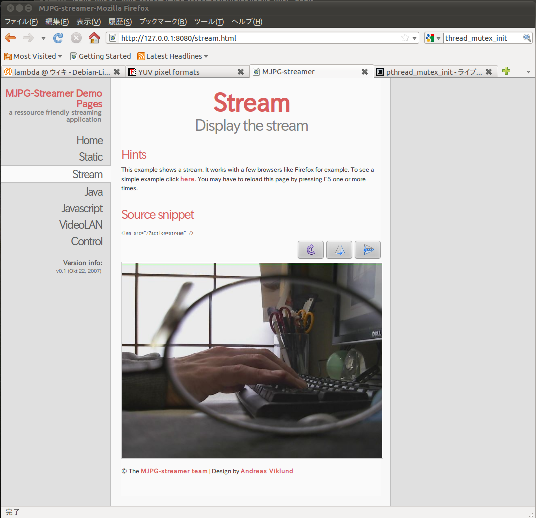
崱擔偼杮柦偺僗僩儕乕儈儞僌僾儘僌儔儉偺挷嵏丅丂儘儃偱僒僶僎偱偺柍慄僇儊儔専摙偺愜偵僲儃儕僒僇偝傫偵徯夘偟偰傕傜偭偨mpg-streamer偲偄偆僾儘僌儔儉傪巊偆丅
偙傟偼擖椡晹暘偲弌椡晹暘傪僾儔僌僀儞偱巜掕偡傞偙偲偑偱偒傞傛偆偵側偭偰偄傞丅丂夋憸張棟偱偼YUYV宍幃偺夋憸僨乕僞傪張棟偟偨偄偺偩偗偳丄儌僯僞乕偡傞偵偼揱憲検傪峫偊偰傕JPEG宍幃偑傛偄丅丂偙偺僾儘僌儔儉偩偲丄僇儊儔偐傜偺YUYV宍幃傪夋憸張棟偟丄僨僶僢僌傗摦嶌妋擣偺偨傔偵儌僯僞乕偡傞偲偒偵偼儌僯僞乕僨乕僞傪YUYV偱梡堄偡傟偽JPEG偵偟偰Web僽儔僂僓乕偱儌僯僞乕偡傞偙偲偑偱偒傞丅
偝傜偵偼奺庬僐儞僩儘乕儖傪峴偆偨傔偺僼僅乕儉傕偁傞偺偱夵憿偟偰巊偆偺偵偆偭偰偮偗丅
偙偺僾儘僌儔儉偼僗儗僢僪傪巊偭偰偄傑偡丅丂僗儗僢僪僾儘僌儔儉偼傛偔抦傜側偔偰偪傚偭偲偟傝崬傒偟偨偺偩偑丄暘嶶張棟偭偰傢偗偠傖側偄偐傜摿偵栤戣側偝偦偆偱偡丅丂嶐擔挷傋偨寢壥傪棅傝偵僜乕僗傪撉傫偱偄偔偲掱側偔偍偍傓偹偺棳傟偼攃埇偱偒傑偟偨丅
崱擔偼僉儍僾僠儍乕僨乕僞傪庢摼偟偰偄傞尰応傪墴偝偊傞偙偲偲丄僨乕僞偺奿擺宍懺乮峔憿懱偲偐乯傪挷傋傞偩偗偵偟傑偟偨丅丂僇儊儔偺僣僀儞壔偼屻擔峴偄傑偡丅
偁偲偼BeagleBoard偲SEMB1200A偺捠怣傪妋棫偡傟偽婎杮揑弨旛偑惍偄傑偡丅丂偱傕丄SEMB懁偵傕偆億乕僩偑側偄側偀丅
偲偙傠偱丄mjpg-streamer偼VMware忋偺FireFox偐傜丄儘乕僇儖儂僗僩傪巜掕偡傟偽摦夋傪尒傞偙偲偑偱偒偨偺偩偗偳丄uvc_stream偩偲儘乕僇儖儂僗僩偩偲偆傑偔偮側偑傜側偄丅Windows偐傜crome偱儌僯僞乕偼偱偒傞傫偱偡偗偳偹丅丂側傫偱偩傠偆丠
丂
偦偺傎偐丄僇儊儔傪擇偮搵嵹偟偨摢晹偺峔憿専摙傪奐巒偟傑偟偨丅丂偱傕丄怴偟偄懌峔憿偺専摙偽偭偐傝傗偭偰偨側丅丂摢晹偼晹昳傪寉偔攝抲偟偨偩偗偱廔傢偭偨偺偵懌峔憿偼姰惉偟偰偟傑偭偨丅丂偆傓乣丄偳偆偟傛偆丄婥偵擖偭偰偟傑偭偨偧丅怴偟偄懌峔憿丅
仭俆寧侾侽擔仭
嶐栭丄側傫偲偼側偟偵帺暘偺僒僀僩傪挱傔偰偄偰嬃偄偨丅丂偢偭偲擔帍傪偝偐偺傏偭偰偄偔偲丄ROBO-ONE丂onPC偺崰偵CPG偺婰帠偑嵹偭偰偄偨丅丂偦偆偄傗丄CPG傪巊偭偰曕偐偣偨偄偲巚偭偰摨婜怣崋傪嶌傞偨傔偵懌棤僙儞僒乕傗僕儍僀儘僙儞僒乕偵庢傝妡偐偭偨偺偱偁偭偨丅丂偁傑傝偵傕偡偭偐傝朰傟偰偄偰傃偭偔傝偟偰偟傑偭偨丅丂偳偆傕棳偝傟夁偓偩側偀丅偪傖傫偲栚揑堄幆傪帩偨側偗傟偽偄偐傫丅
丂
夛幮偐傜婣偭偰偐傜僙儞僒乕梡偺CPU儃乕僪偲揹尮儃乕僪偺慻傒棫偰傪傗偭偰偍傝傑偟偨丅
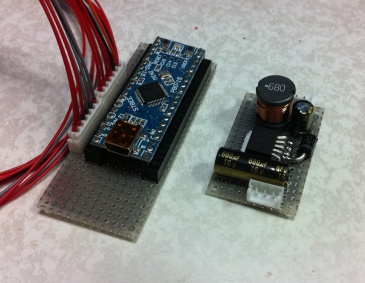
姰惉丅丂CPU儃乕僪偺壓偵偼RS485僪儔僀僶乕偑塀傟偰偄傑偡丅丂塃偼俆V俁A偺DCDC僐儞僶乕僞婎斅丅僇僞儘僌偳偍傝側傜偽岠棪80%偔傜偄偱12V傪5V偵曄姺偟偰偔傟傑偡丅
偁偲偼傾儈僄偝傫偐傜拲暥偟偨晹昳偑撏偔偺傪懸偮偽偐傝丅
仭俆寧侾俆擔仭
嬥梛擔偵夛幮偐傜婣傞偲傾儈僄偝傫偵拲暥偟偰偄偨晹昳偑梊掕捠傝偵撏偄偰偄傑偟偨偺偱憗懍慻傒棫偰丅
崢晹暘偵儅僀僐儞儃乕僪偲揹尮儃乕僪偑廂梕偝傟偰偄傑偡丅丂偝傜偵崱夞丄揹尮僗僀僢僠傕庢傝晅偗傑偟偨丅丂崱傑偱偼儔僕僐儞棳偵僶僢僥儕乕僐僱僋僞傪敳偒嵎偟偟偰偄偨傫偱偡偗偳丄僗僺乕僪嫞媄傪偡傞傢偗偠傖側偄偺偱僗僀僢僠偑擖偭偰曋棙偵側偭偰傕儘僗偱崲偭偨傝偼偟側偄偩傠偆偲丅
偄傑傑偱丄俆V乣俋V偱摦偔SEMB1200A偵懳偡傞揹尮偼僶僢僥儕乕偺11.1V偐傜儗僊儏儗乕僞偱棊偲偟偰擖椡偟偰偄傑偟偨偑丄DCDC僐儞僶乕僞傪庢傝晅偗偨偺偱岠棪偺埆偄儗僊儏儗乕僞偼庢傝奜偟傑偟偨丅丂偝傜偵BeagleBoard偲僇儊儔傕搵嵹偡傞偮傕傝側偺偱岠棪傛偔偟側偄偲偹丅
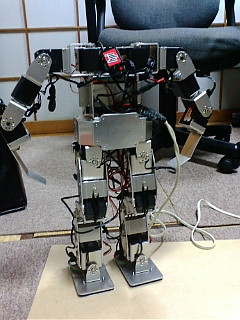
偝偰丄偙傟偱懌棤偵ZMP僙儞僒乕偑偮偄偰丄崢晹暘偵偼僕儍僀儘偲壛懍搙僙儞僒乕傕偮偒傑偟偨丅丂僙儞僒乕僼傿乕僪僶僢僋僾儘僌儔儉丄懌摜傒摦嶌傪拪弌偟偰CPG偱偺曕峴丄偦偟偰俀娽偺僇儊儔偲丄傗偭偲儘儃僢僩傜偟偔側偭偰偒偨偧丅
丂
偲偙傠偱崱夞丄崢晹暘偺峔憿傪曄峏偡傞嵺丄惉傝峴偒偱乮崢晹暘偩偗乯奜憰偑偮偒傑偟偨丅丂偙傟偭偰傕偺偡偛偔婥帩偪偄偄丅丂摲懱傕奜崪奿宆偵偟傛偆偐側丅
仭俆寧侾俇擔仭
崱擔偼挬偐傜戝嶃弌挘偩偭偨偺偩偗偳丄栚揑抧偱偺懾嵼帪娫偼栺30暘偱偟偨丅丂偦偺傑傑偲傫傏曉傝偩偭偨偺偱丄堦擔拞怴姴慄偵忔偭偰偨姶偠丅丂側傫偩偐柊偔偰柊偔偰偢偭偲怮偰偨乮婣傝偼價乕儖堸傫偱怮偰偨乯偺偩偗偳丄傎偲傫偳扤偲傕偟傖傋傜側偄堦擔偱丄偝傜偵妶摦傕偟偰偄側偄偺偱懚嵼姶偑彮偟婓敄偵側偭偨婥偑偟偰偟傑偭偨丅
丂
 丂丂
丂丂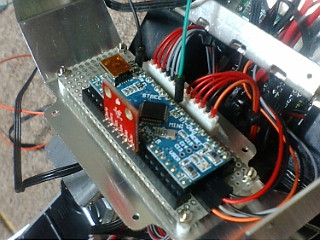
慻傒棫偰偨崢晹暘傪憗懍暘夝偟偰丄僾儘僌儔儉偺奐巒偱偡丅丂崱偼傾僗僉乕僐乕僪偱悢帤傪弌椡偟偰偄傞偺偩偗偳柍懯偵僨乕僞挿偑挿偔側偭偰偟傑偆偺偱HEX僐乕僪偱弌椡偡傞傛偆偵曄峏偟傑偡丅偝傜偵偼丄崱偺僥僗僩僾儘僌儔儉偼儖乕僾偱憲怣偟傑偔偭偰偄傞偺偱偡偑丄僞僀儅乕偱掕帪弌椡偟傑偡丅丂僒乕儃偺惂屼廃婜偑20ms偔傜偄乮25ms偩偭偗偐側丠乯側偺偱丄10ms掱搙偺廃婜偵偟傑偡丅偱偒傞偩偗嵟怴僨乕僞偱僼傿乕僪僶僢僋偑偐偐傞傛偆偵丅丅
偙傟丄僙儞僒乕儅僀僐儞傪曄峏偡傞偲丄Windows偺儌僯僞乕僾儘僌儔儉傕丄庴怣懁偱偁傞SEMB1200A偺僾儘僌儔儉傕曄峏偟側偗傟偽側傜側偄丅丂偡傞偲偆傑偔峴偐側偄偲偒偳偭偪偵僶僌偑偁傞偐傢偐傜傫傛偆偵側傞傫偱偡傛偹丅丂偁乕傔傫偳偔偝偄丅
偱傕丄儘儃僢僩偺奜憰傪偼偢偟偰働乕僽儖堷偒弌偟偰僨僶僢僌偟偰偄傞巔偭偰丄傾儉儘偑僴儘傪慻傒棫偰偰傞僔乕儞乮夞憐僔乕儞偩偗偳乯傒偨偄偱偄偄偱偡偹丅
偙偺僾儘乕僽慄傪庢傝晅偗偰偄傞偺偼STBee-MINI傪庢傝晅偗偰偄傞僺儞僜働僢僩偱偡丅丂STBee-MINI偵揧晅偟偰偄傞僿僢僟乕偲僺儞僜働僢僩偩偲柍懯偵攚偑崅偔側偭偰偟傑偆偺偱廐寧偱攚偺掅偄偺傪扵偟偰偨偲偙傠丄1楍傕偺偱偼尒偮偐傜側偔偰2楍傕偺偟偐偁傝傑偣傫偱偟偨丅
巇曽側偄偺偱偙偺2楍傕偺傪偮偐偭偰偄傞偺偩偗偳丄梋偭偨1楍偼STBee-MINI偺奜懁偵側傞傛偆偵攝抲偟偰丄怣崋堷偒弌偟偵巊偊傞傛偆偵偟偰偄傑偡丅僕儍僀儘仌G僙儞僒乕傕丄I2C偺怣崋偺暲傃偑堦弿偩偭偨偺偱偙偺梋偭偨1楍傪棙梡偟偰娙扨偵庢傝晅偗傞偙偲偑偱偒傑偟偨丅
憗懍僾儘僌儔儉偵擖傠偆偲偟偨傜丄Windows偺儌僯僞乕僾儘僌儔儉偑僄儔乕傪婲偙偟偰摦偐側偄丠丠丠丂偙傟偼僕儍僀儘仌G僙儞僒乕傪庢傝晅偗偨偙偲偱僄儔乕僐乕僪偑弌側偔側偭偰偟傑偭偨偺偱儌僯僞乕偺僨僐乕僪晹偑僄儔乕傪婲偙偟偰偨偲丅丂偟偐偟丄僄儔乕僐乕僪傪巊偭偰僨僐乕僪偡傞偭偰娫偵崌傢偣偵嶌偭偨偵偟偰傕偄偄壛尭夁偓偩偧亜1儢寧慜偺僆儗
僗儅僗儅偵弌偰偨杒愳宨巕傪娤偨傝偟偰偨偺偱庢傝偐偐偭偨偺偑抶偐偭偨丅傕偆抶偄偺偱懕偒偼柧擔偲偄偆偙偲偱丅丂
仭俆寧俀俁擔仭
偁傟丠侾俇擔偐傜擔帍傪峏怴偟偰偄側偐偭偨丠丠丂偦偆偩偭偗偐側丅
偊偊偲丄僙儞僒乕梡CPU偐傜偺憲怣僼僅乕儅僢僩傪僶僀僫儕乕偵偟偰僠僃僢僋僒儉偮偗偰抁偔偡傞偺偩偗偳丄Windows偱偺儌僯僞乕僾儘僌儔儉偵擄峲丅丂僥僉僗僩僨乕僞偱庴偗傞偺偼娙扨側偺偵僶僀僫儕乕偩偲偳偆偡傟偽偄偄偺偐側丠丂VisualC++偭偰傕偆偙傟偭偰C偱傕C++偱傕側偄偱偡偹丅偪傚偭偲挷傋偰丄僶僀僩偛偲偵僶僢僼傽偐傜庢傝弌偡儊僜僢僪傪巊偭偰傕巚偄捠傝摦偐側偄丅偳偆傕丄僶僢僼傽偵偁傞僨乕僞悢傪挷傋偰偦偺僶僀僩悢偩偗庴怣偟側偒傖側傜側偄偺偐側丠丂挷傋偨傝僩儔僀偡傞偺偑傔傫偳偔偝偔側偭偰Windows偺儌僯僞乕僾儘僌儔儉偼曻抲丅丂偁偲偱偳偆偡傞偐峫偊傛偆丅
偭偰偙偲偱SEMB1200A偺庴怣僾儘僌儔儉傪嶌傞偙偲偵丅
偲巚偭偰偄偨偺偩偑丄栘梛擔偺栭偐傜側傫偩偐懱挷偑偍偐偟偄偧丠丠丂嬥梛擔偼屵慜拞偩偗側傫偲偐巇帠偟偰屵屻偐傜偼憗戅丅丂偦偺傑傑搚梛擔乣擔梛擔偲偖偩偖偩偵側偭偰偟傑偄傑偟偨丅丂晽幾傒偨偄側姶偠側傫偩偗偳擬偼傎偲傫偳側偟丅偨偩偟摢捝偑傂偳偔偭偰摢巊偆傛偆側嶌嬈偼偝偭傁傝偱偒側偄丅丂偠偭偲偟偰偄傞偲摢捝傕帯傑傞偺偩偗偳摦偒弌偡偲揻偒婥偑偡傞傎偳摢捝偑偟弌偡丅丂偦偟偰傑偨怮傞丅丂偙偆偄偆偲偒偭偰偄偔傜偱傕怮傟傞傫偱偡偹丅
偦偆偟偰擔梛擔偺栭偔傜偄偵傗偭偲摢捝偑帯傑偭偰妶摦傪嵞奐偱偒傞傛偆偵側傝傑偟偨丅
丂
偦傟偐傜傕偁傟傗傜偙傟傗傜偁偭偨偺偱偡偑丄徣棯偟偰SEMB1200A偺庴怣懁偺僾儘僌儔儉偑偱偒傑偟偨丅丂僠僃僢僋僒儉晅偒偺僶僀僫儕乕僨乕僞偱憲傞偙偲偱埑椡僙儞僒乕偲僕儍僀儘亄壛懍搙僙儞僒乕偺應掕寢壥傪31byte乮僿僢僟乕崬傒乯偱憲傞傛偆偵偟傑偟偨丅丂10ms廃婜偱庴偗庢偭偰偄傞偺偱丄25ms廃婜偺僒乕儃憖嶌偲摨婜偼偟偰偄側偄偺偩偗偳廫暘偵棙梡偱偒傞僨乕僞偲側偭偰偄傞偼偢丅丂偢乕乕偭偲儔儞僯儞僌摦嶌偝偣偰偄傞偲丄3亾偔傜偄偺妋棪偱捠怣偵幐攕偟偰偄傞傛偆偱偡丅丂偍偦傜偔偼懠偺捠怣乮懡暘僒乕儃捠怣偄傗CSI捠怣偺壜擻惈傕偁傞偐乯偲偐傇偭偰偟傑偆廃婜偱庢傝偙傏偟傪偟偰偟傑偆傜偟偄丅丂儂儞僩側傜偍榖偵側傜側偄僄儔乕検側傫偩偗偳傑偀偄偄偐丅丂僄儔乕僨乕僞偼攑婞偱偒傞傛偆偵偟偰偄傞偺偱傛偟偲偟傛偆丅
傎傫偲偼嬻偒帪娫偵僨乕僞憲傟偭偰巜椷傪弌偡傛偆偵偡傞傋偒偩傠偆側丅丂捠怣椏傕尭傞偟丅
偙偙傑偱偼嶐栭偺榖丅丂嶐栭偼昦傒忋偑傝偱屵慜2帪偔傜偄傑偱傗偭偰偨偺偱偝偡偑偵擔帍傪峏怴偡傞嶌嬈偼傑偢偄偲巚偭偰怮偰偟傑偄傑偟偨丅丂偝偰丄偙傟偐傜嶐擔偺懕偒傪傗傞偐乕丅
丂
偦偆偄偊偽丄摍恎戝僗僐乕僾僪僢僌傪嶌偭偨KOGORO偝傫偑崱搙偼桘埑偱摦偔嫄戝儘儃僢僩傪嶌偭偰傞偲偐丄偦傟偺惂屼晹暘傪V-sido偺媑嶈偝傫偑扴摉偡傞偲偐丅丂偡偘乕両俀懌偺嫄戝儘儃偑偲偆偲偆曕偔偺偐両丠丂偲巚偭偨傜丄偙傟偼俀懌偠傖側偄傫偱偡偹丅係媟偱丄儌僨儖傪尒傞尷傝懌偺愭偵僞僀儎偑偮偄偰偄傞丅丂偆偆傓巆擮丅丂桘埑偠傖懍搙揑偵曕偔偺偼柍棟偐側丅
仭俆寧俀係擔仭
嶐擔偺擔帍傪彂偄偨屻丄傗偭傁儌僯僞乕娐嫬偑梫傞偱偟傚偆偭偰偙偲偱僙儞僒乕儃乕僪偐傜庴怣偟偨僶僀僫儕乕僨乕僞傪婛偵偱偒偰偄傞Windows偺儌僯僞乕僾儘僌儔儉偑棟夝偱偒傞僥僉僗僩宍幃偵曄姺偟偰弌椡偡傞傛偆偵偟偰傑偟偨丅
僙儞僒乕儃乕僪偐傜SEMB傊偺僨乕僞憲怣偼10ms枅側偺偩偗偳丄偦偺儁乕僗偱SEMB偐傜弌椡偡傞偲娫偵崌傢側偄乮SEMB偺儌僯僞乕偼柍慄偵偟偰偄傞偨傔偵懍搙傪抶偔偟偰偄傞乯偲偄偆偙偲偱10暘偺1偱偁傞100ms枅偵弌椡偟儌僯僞乕僾儘僌儔儉偱庴怣偱偒傞傛偆偵偟偰傑偟偨丅丂儌僯僞乕僾儘僌儔儉偼傕偆偡偖偍栶屼柶側偺偱偙傫側姶偠偱偄偄偱偟傚偆丅丂傑丄傕偺偡偛偔晄曋側傫偱偡偗偳偹丅丂側偄傛傝儅僔偭偰掱搙偐側丅
丂
偦偟偰丄憗懍ZMP應掕寢壥傪僼傿乕僪僶僢僋偟偰傒傞偙偲偵丅丂堦斣娙扨側偺偼ZMP偺X曽岦Y曽岦偺偢傟偵崌傢偣偰懌庱偺僒乕儃偵僼傿乕僪僶僢僋傪偐偗傞偙偲丅丂偙傟偩偲偡偖偵偱偒偦偆側傫偩偗偳堦偮怱攝偑丅
ZMP偑偢傟偰偄傞曽岦偵廳怱偑偢傟偰偄傞傢偗偩偐傜懌庱偵僼傿乕僪僶僢僋偟偨寢壥偝傜偵ZMP偼偢傟偰偟傑偆丅丂側傫偐敪怳偟偰偟傑偄偦偆偩側乕偲丅丅
傎偐偺僼傿乕僪僶僢僋曽朄偩偲ZMP偺偢傟偵偁傢偣偰忋懱傪孹偗傞偲偐偐側丅丂丂廳怱婳摴偦偺傕偺偵曗惓傪偐偗傞側傜曗惓偺寁嶼傪偟側偒傖側傜側偄偟丄偦偺梊應偭偰抧柺偑暯扲偱偁傞偙偲偑慜採偲側傞傢偗偩偐傜儘僶僗僩惈偵偐偗傞傫偠傖側偄偐側偲巚偭偰宧墦偟偰傞丅
丂
傑偀峫偊偰傕傢偐傜傫偐傜偲偵偐偔傗偭偰傒傞偙偲偵偡傞丅丂傑偢偼扨弮偵懌庱僒乕儃偵PID惂屼偱僼傿乕僪僶僢僋偟偰傒傞偺偩偑丄偙偺働乕僗偩偲愊暘梫慺偭偰晄梫偐側丅丂PD惂屼偭偰暦偄偨偙偲側偄偗偳丄愊暘梫慺偺學悢偑僛儘偩偲巚偊偽傛偄偩傠偆丅
偲偄偆偙偲偱偲傝偁偊偢P梫慺乮斾椺梫慺乯偩偗偱僼傿乕僪僶僢僋偟偰傒傞偲丄

棫偭偰傞偩偗偱偖傜偖傜偲乮徫乯丂偠偭偲偟偰傞偲偖傜偖傜偟偰傞傫偩偗偳丄偙偺忬懺偱曕偐偣傞偲傑偀傑偀曕偔丅丂僼傿乕僪僶僢僋偺岠壥傕姶偠側偄偗偳偹丅
偠傖乕D梫慺乮旝暘梫慺乯傕擖傟偰傒傞偐丅晛捠丄旝暘梫慺偭偰捛悘懍搙傪忋偘傞偨傔偵擖傟傞偗偳丄偙偺働乕僗偩偲旝暘梫慺偺學悢偼儅僀僫僗偵偡傟偽椙偄偺偐側丠丂丂丒丒丒偦傟偲傕忋懱偺孹偒偵僩儔僀偐側乕丄偦偭偪偼寢峔戝曄側傫偩傛側丄曄峏揰偑懡偔偰丅
偝偰丄偁偰偢偭傐偆偽偭偐傝偠傖側偔偰惂屼偺嫵壢彂傕挷傋偰傒傞偐丅
仭俆寧俀俇擔仭
嶐栭偼堸傒夛偩偭偨偺偱嶌嬈偼偱偒偢丅
PD梫慺偱學悢傪怓乆曄偊偰傒偰傕曄壔側偟丅
偱偼丄偭偰偙偲偱丄懌庱偩偗偠傖側偔偰屢娭愡傕媡埵憡偱僼傿乕僪僶僢僋偟偰傒傞偙偲偵偟偰傒傑偟偨丅丂懌庱偩偗偩偲廳怱偑曄壔偡傞慜偵懌棤偺埑椡偺曽偵岠壥偑弌偰偟傑偆偺偱偆傑偔側偄丅屢娭愡傕媡埵憡偱曄壔偝偣傞偙偲偱廳怱偼堏摦偡傞偗偳懌棤偵偐偐傞埑椡偼捈愙曄壔偟側偄丅
偲偄偆偺偱傗偭偰傒偨偲偙傠丄岠壥偑偁傞傛偆側婥偑偟偰偒偨丅丂側偵偣僼傿乕僪僶僢僋側偔偰傕偦偙偦偙摦偔偺偱寑揑曄壔偑婲偙傜側偄傢偗偱岠壥偺傎偳偑傢偐傜側偄丅
曄壔偲尵偆偲丄僼傿乕僪僶僢僋傪偐偗偨傎偆偑僈僔僈僔偲摦偔丅丂僼傿乕僪僶僢僋側偟偩偲僗僞僗僞乣偭偰姶偠側傫偩傛偹丅丂僼傿乕僪僶僢僋側偟偺曽偑僗儅乕僩側姶偠丅
偱傕丄曕暆傪曄偊偨傝怓乆傗傞偲丄僼傿乕僪僶僢僋傪偐偗側偄偲晄埨掕偵側傞傛偆側僷僞乕儞偱傕僼傿乕僪僶僢僋偑偁傟偽曕偗傞傛偆側姶偠偵側偭偰偒偨丅丂偱傕丄偦傟偱傕傑偩姰慡僌儕僢僾曕峴偼偆傑偔側偄傫偩傛側偀丅
偁偲丄屢娭愡傕摦偐偟偰偄傞偺偱惂屼検偑戝偒偄偲懌偑棈傫偠傖偆応崌傕偁傞丅丂儕儈僢僩傕庴偗側偄偲偄偗側偄側丅
丂
僕儍僀儘傕摦偐偟偰丄揮搢夞旔偵嵞僩儔僀偟偨偄側丅丂偦偺慜偵僇儊儔傪側傫偲偐偟側偄偲側偀丅
仭俆寧俀俈擔仭
僼傿乕僪僶僢僋惂屼傕側傫偲側偔惉壥偑尒偊偰偒偨偺偱俀娽僇儊儔偵庢傝慻傒偨偄側偲丅
偪傚偔偪傚偔傾儅僝儞傪僠僃僢僋偟偰偄偨傜攧愗傟偰偄偨C510偑擖壸偟偨傜偟偄偺偱攦偭偰偍偄偨偺偑撏偄偰偄傞丅丂憗懍俀戜偺C510傪愙懕偟偰傒傑偟傚偆丄丂偲嶌嬈傪偟偩偟偰巚偄弌偟偨丅偦偆偄偊偽C910偲C510偺慻傒崌傢偣偩偲懷堟僆乕僶乕傜偟偄栤戣偱俀戜栚偺僇儊儔偑巊偊側偄偺偱偁偭偨丅
C510亊俀戜偩偲偳偆偐両丠丂僟儊偩偲偣偭偐偔攦偭偨C510偼柍懯攦偄偩偭偨偭偰偙偲側偺偩偑丅丅丅
丂偭偰懄僟儊偑弌傑偟偨丅乮媰乯
儗僝儕儏乕僔儑儞棊偲偟偰傕僟儊丅壗偟偰傕僟儊丅丂傆偅丄幐攕偱偡偐丅
偱傕俀娽傗傝偨偄偐傜側偀丄偲偄偆偙偲偱傕偭偲懷堟偑嵶偦偆側僇儊儔傪扵偡偙偲偵丅丂僶僢僼傽儘乕傒偨偄偵埫偔偰抶偄偺偼梫傜側偄偐傜傗偭傁傝儘僕僋乕儖偐傜慖傇偙偲偵偟傛偆丅
儘僕僋乕儖偺Web儁乕僕偵峴偔偲丄丄丂偁傜傜傜傜丄C510偺屻宲偺C525偭偰偺偑嵹偭偰傞丅丂摨偠僒僀僘偱摨偠掕壙偱AF晅偱偡傛丅丂AF偺埿椡偼傕偺偡偛偄傕偺偩偐傜梸偟偄偗偳側偀俀娽偱偒側偄偐傜堄枴側偄偐丅丂乮偱傕偦偺偆偪攦偭偪傖偄偦偆乯丂偪側傒偵傾儅僝儞壙奿偱偼C510傛傝1000墌偔傜偄偼崅偄丅
偲偄偆偙偲偱丄偝傜偵奿壓偺C270偭偰偺傪攦偆偙偲偵丅丂傾儅僝儞偱1,500墌側偺偱堦婥偵2屄攦偭偪傖偆偙偲偵偟傑偡丅丂偙傟偱偩傔側傜C525偱1娽偱恑傔傞偐側偀丄偄傑偄偪忔傝婥偑偟側偄偗偳丅
偦偺懠偺曽朄偲偟偰偼USB儂僗僩傪2杮偵偟偰偦傟偧傟偵僇儊儔傪偮側偖偲偄偆偺偑偁傝偦偆偱偡丅丂偱傕BeagleBoard偵USB儂僗僩傪憹愝偭偰偺偼偱偒偦偆偵側偄偟偹偉丅
丂
ZMP僼傿乕僪僶僢僋偺曕峴偺條巕傪摦夋偱嶣塭偟傑偟偨丅丂僼傿乕僪僶僢僋偵傛偭偰寑揑側埨掕惈偑惗傑傟偨傢偗偱傕側偔丄僼傿乕僪僶僢僋偟側偄偱傕傑偀傑偀偒傟偄偵曕偄偰偄偨偺偱嵎偑偁傫傑傝傢偐傜側偄偺偩偗偳丄僼傿乕僪僶僢僋偐偗側偄偲偒偼懌傪崅偔忋偘傞偲晄埨掕偵側傝偑偪偩偭偨偺偑丄偁傑傝晄埨側偔曕偗偨傝偡傞偐傜偒偭偲岠壥偼偁傞偺偩傠偆丅
寑揑價僼僅傾傾僼僞乕偠傖側偄偺偑巆擮偱偡偑丅
偄傑傑偱屢娭愡崅偝愝掕傪230mm偵偟偰偄偨偺偩偗偳丄偙偺摦夋偼屢娭愡崅偝愝掕偼250mm偱偡丅偙偙傑偱懌傪怢偽偡偲寢峔尒塰偊偑偄偄偲巚偆偺偱偡偑偳偆偱偟傚偆丅丂傂偞嬋偘曕峴傛傝偼恖娫偵嬤偄偲巚偆偺偩偑丅丂傕偆堦懅偩側丅
仭俆寧俀俋擔仭
搚梛擔偼楙廗夛偱偟偨丅
夛応偼憪壛偺彜岺夛媍強側偺偱偡偑丄憪壛偼墦偄偺偱偄偮傕擇偺懌傪摜傫偱偟傑偄傑偡丅丂偝傜偵嵟嬤丄壸憿傝偡傞偺偑堎條偵寵偵側偭偰傑偟偰丄寢嬊儘儃僢僩傕偭偰峴偐側偐偭偨傝丅丅
崱夞偼峏偵峏偵揤婥偑塉側偺偱幵偱峴偔偙偲偵偟傑偟偨丅偱傕幵偩偲堸傔側偄傫偩傛側乕丅丂愄偼堸傑側偔偰傕惙傝忋偑傟傞偭偰巚偭偰偨偗偳嵟嬤偳偆傕僟儊偱偡偹丅丂庰偺椡傪庁傝側偄偲僥儞僔儑儞忋偑傜側偄丅丅
丂
崱夞傕塉揤偲偄偆埆忦審偵娭傢傜偢憡摉偨偔偝傫偺嶲壛幰偱偵偓傢偄傑偟偨丅丂嵟嬤偼戝妛惗偺僌儖乕僾偑偨偔偝傫嶲壛偡傞偺偱偄偄孹岦偱偡偹丅丂戝妛惗偨偪偼孹岦偲偟偰丄楙廗夛偵棃偰傕帺暘偨偪偩偗偱惙傝忋偑傞孹岦偑偁偭偨偺偱偡偑丄嵟嬤偼妛惗堦恖傂偲傝偑乽儘儃僢僩尒偣偰傕傜偭偰偄偄偱偡僇乕乿偭偰姶偠偱傗偭偰偔傞偺偱恑曕偱偡丅丂壗偑曄傢偭偨傫偩傠偆丠丠
偱丄崱夞偼幵偱嶲壛偭偰偙偲偩偭偨偺偱儔儉僟傕僔僌儅傕僩儔儞僋偵曻傝崬傫偱傗偭偰偒傑偟偨丅丂儔儉僟偼ZMP僙儞僒乕偑偱偒偨偺偱偪傚偭偲尒偰梸偟偐偭偨偟丅
偱丄儔儉僟傪尒偵棃偰偔傟偨妛惗偑丄乽懌偑2廳偵側偭偰偄傞偺偼側偤偱偡偐丠乿偲偄偆幙栤傪丅丂偍偍丄椙偔偧暦偄偰偔傟偨両丂乽偙傟偼ZMP傪應掕偡傞偨傔偺埑椡僙儞僒乕偑巇崬傫偱傞傫偩乿丂偲偐愢柧偟偨傜丂乽ZMP應掕偟偰壗偡傞傫偱偡偐乿丂偊乕乕乕偲丄丂偦偺幙栤偼憐掕奜偩側丅丂乽ZMP偭偰壗偱偡偐乿側傜傑偩偟傕丅丅丅
丂
僙儞僒乕偵斀墳偟偰偔傟偦偆側偺偼媑揷偝傫丄彫愹偝傫偔傜偄偐丅丂偱傕偍擇恖偲傕崱擔偼嫃側偄條巕丅丂偱丄偔傑傑偝傫偵乽媑揷偝傫偵尒偣偨偐偭偨傫偩傛側乕乿偲偐尵偭偰偨傜楙廗夛廔傢傝娫嵺偵媑揷偝傫搊応丅
傂偲偟偒傝弌棃嬶崌傪尒偣偨偲偙傠丄乽曕峴帪偺晧壸偺僇乕僽偼偳傫側姶偠偱偡偐乿丂乽斀墳懍搙偼丠乿丂偲偐僀僀斀墳偱偡丅丂偁丄偱傕偦偙傜偁偨傝偺暘愅偑傑偩偱偒偰側偄傫偱偡傛偹丅丂偲偄偆偙偲偱曕峴帪偺埑椡曄壔偺僇乕僽傪庢摼偟偰傒傑偟傚偆丅
丂
崱擔偺挬丄楙廗夛偺旀傟偐丄偄偮傕傛傝挬怮丅丂婲偒偰挬斞怘傋偰偐傜傕偆偲偆偲偟偰偄傑偟偨傜丄傾儅僝儞偐傜壸暔偑丅丂嬥梛擔偵棅傫偩C270亊2戜偑傕偆撏偄偨傛偆偱偡丅丂憗偄側偀丅丂奜憰偺愝寁傪偟偰偄偨偺傪拞抐偟偰憗懍2戜摨帪偵巊梡偱偒傞偐偳偆偐傪僥僗僩丅
側傫偐丄僞僀儉傾僂僩僄儔乕偑偱傗偡偄偺偑婥偵側傞傫偩偗偳丄2戜摨帪偵僨僶僀僗僆乕僾儞偟偰僌儔僽乮夋憸庢摼乯傕摨帪乮偲偄偆偐暲峴偭偰偄偆偐乯偵偱偒傑偟偨両丂傛偐偭偨乕丄摎偊偼偙傟偐丅丂3000墌偱嵪傓偲偙傠Web僇儊儔偵偄偭偨偄偄偔傜巊偭偨偩傠偆丅

懍搙傕2戜偱僉儍僾僠儍乕偟偰偄傞忬懺偱丄29乣31fps偔傜偄偱偡丅
偙偺傑傑俀娽僇儊儔偵撍擖偟偨偄婥帩偪傪梷偊偰奜憰愝寁偺懕偒偲丄ZMP僙儞僒乕傪巊偭偨暘愅傪傗傞偙偲偵丅
僙儞僒乕抣傪婰榐偡傞偵偼戝検偺儊儌儕乕偑梫傞偺偩偗偳丄曕峴帪偺娭愡妏搙抣傪婰榐偟偰偄傞偺偱偦傫側偵梋桾偑偁傝傑偣傫丅丂偲偄偆偙偲偱丄娭愡妏搙僉儍僾僠儍乕婡擻偵僗僀僢僠傪捛壛偟偰儊儌儕乕偵梋桾傪帩偨偣傑偟傚偆丅丂偮偄偱偵僗僀僢僠娭學偺曄悢傪摑崌娗棟偟偰丄丄丄丂偲偄偆惍棟傪傗偭偰偨傜帪娫偑側偔側偭偰偟傑偭偨丅
懕偒偼偁偟偨丅
嶐擔偺懕偒丄丂僉儍僾僠儍乕偱偒傞傛偆偵側傝傑偟偨丅丂10ms廃婜偺僨乕僞偱偡丅
傑偢丄ZMP僼傿乕僪僶僢僋側偟
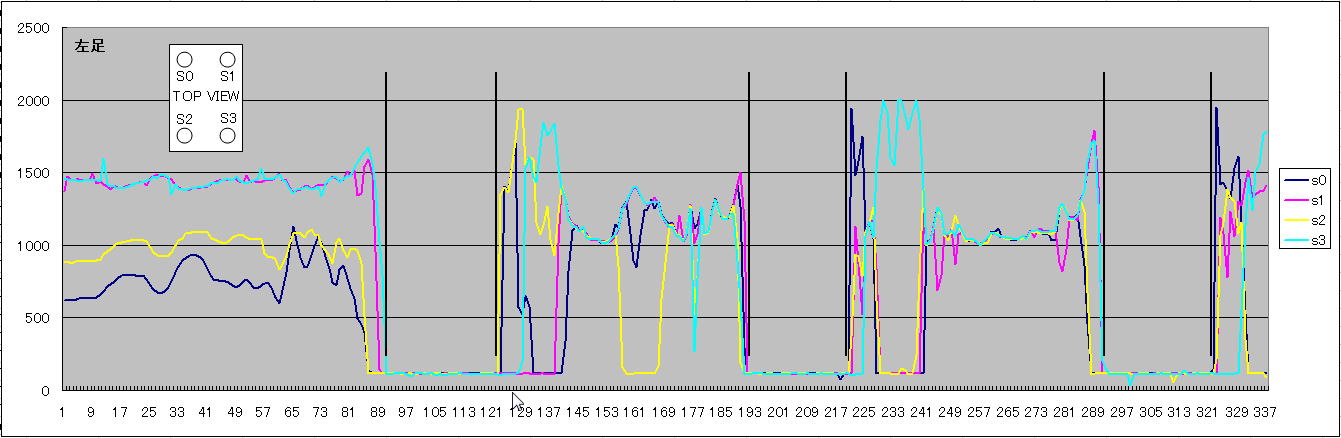
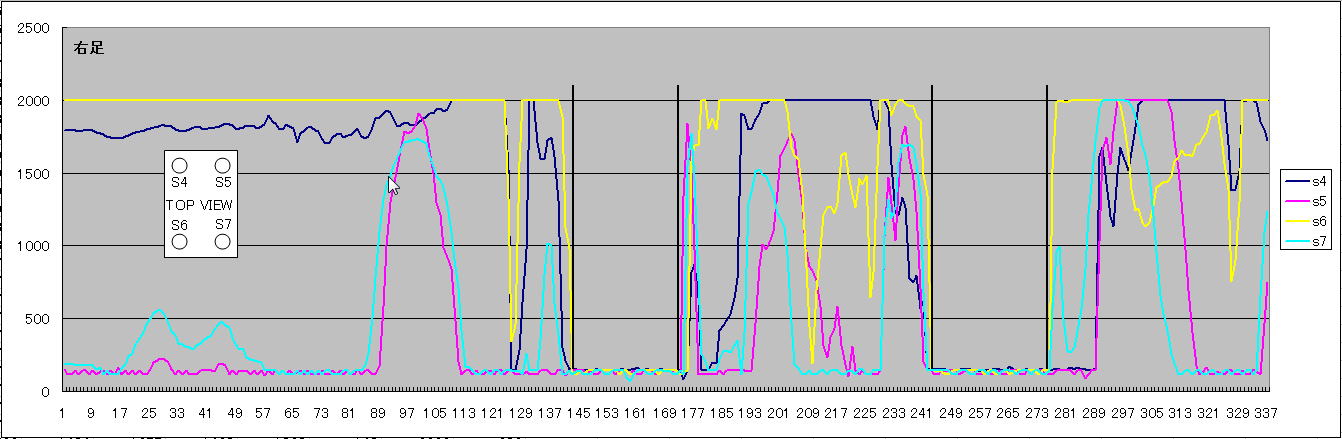
師偵ZMP僼傿乕僪僶僢僋偁傝丂嵍丄塃偺弴偱偡丅
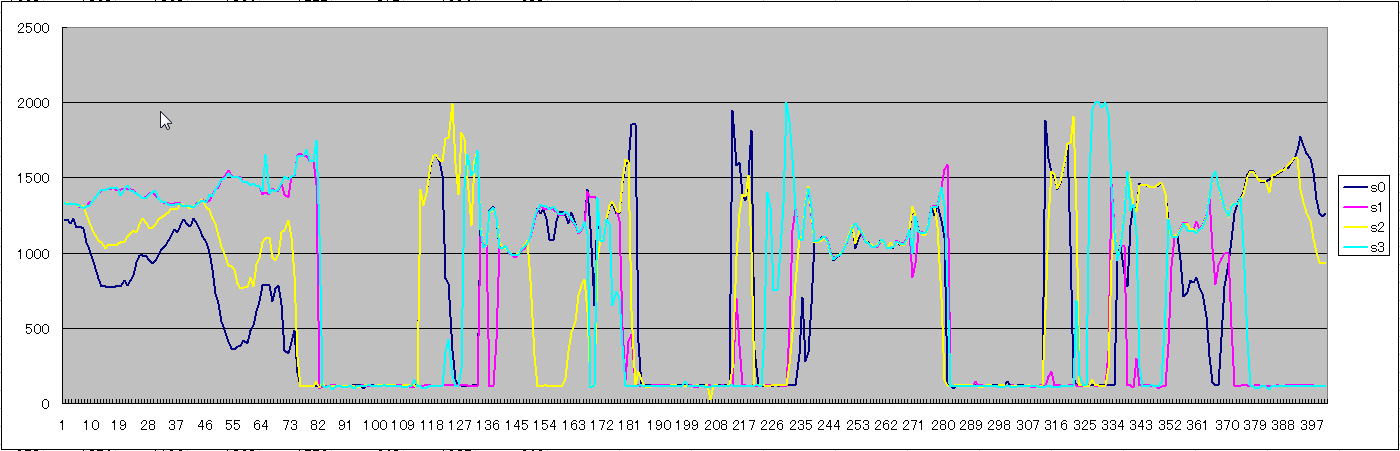
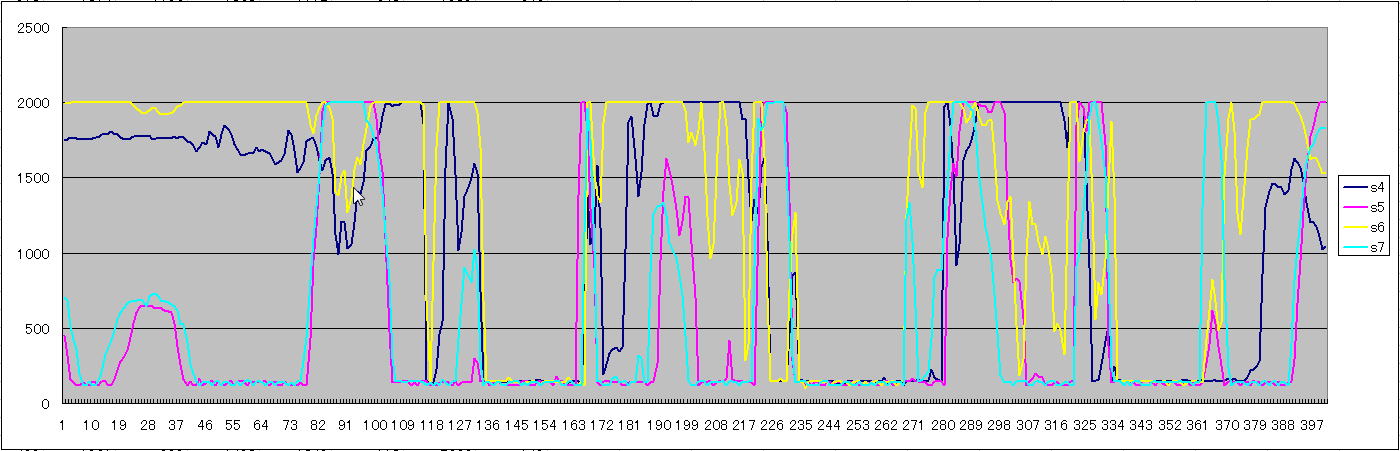
僈僢僠儍僈僠儍偱偡偹丅丂偦偟偰丄僼傿乕僪僶僢僋偺桳傝柍偟偼偝偭傁傝傢偐傜側偄丅
懌偑晜偄偰偄傞帪娫偑悘暘偲抁偄偱偡丅丂椉懌巟帩婜娫偼愝偗偰偼偄傞偗偳偙傫側偵偼挿偔側偄偼偢丅丂偙偺曈傝偑僼儖僌儕僢僾偱偼曕偗側偄偲偄偆偲偙傠偱偡偹丅丂懌忋偘娭悢傪偄偠偭偰傒傞偐側偀乣丅丂4曕栚乮嵍懌巟帩乯偺帪偼側偤偐僀僀姶偠偵ZMP偑拞墰晅嬤偵棃偰偄傞傛偆偱偡丅丂側偤偩傠偆丠丠
僗僞乕僩帪揰偱ZMP偑拞墰偵棃偰偄側偄偺偼椉懌愙抧帪偺僩儕儉挷惍偑晄廫暘丄傑偨偼屢娭愡偺僥儞僔儑僫乕偑岠偒偡偓偰偄傞偣偄偐偲丅