開発日誌(32)
■1月1日■
あけましておめでとうございます。 今年こそは自律に着手していくことで進めて行きたいです。。。。 去年も言ってたなぁ。(^_^;)
さて、紅白歌合戦を見ながらサーボを入れ替えて、股関節ロールにテンショナーを入れ、トリムをしっかり取った結果、
歩けるようになりました。
動画では歩幅100mmですが、120mmくらいまでいけそうです。 リンク脚のマーキュリーの時は70mmくらいがいいところだったので進歩です。 各関節の再生具合を見ても、大きなズレはないようで、補正の仕組みを色々と考えていたのだけど、補正の甲斐がなさそうなくらい。
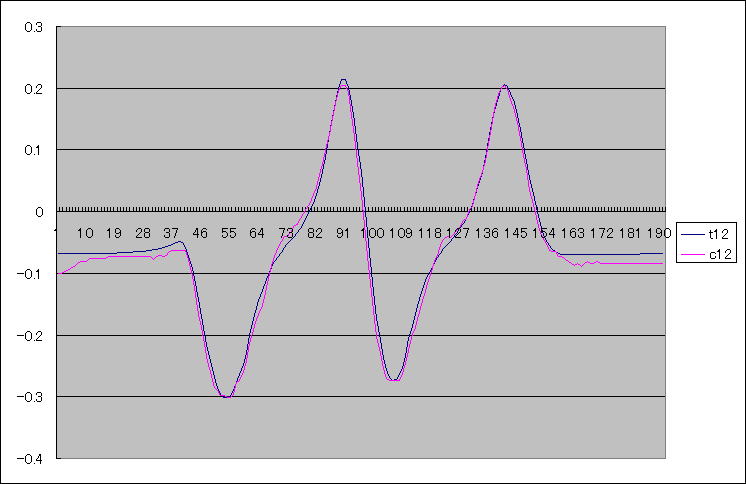
各関節の再生具合がいいということは重心が出ているってことで、問題にしていた足首ピッチ関節もこんな感じです。↓
ゼロクロスするあたりの、少しだけ角度ズレが起こっているところが着地衝撃です。
どうすっかな。歩行はこれでまとめて、あたま(カメラ)の開発にとりかかろうかな。 おせち食べながら考えるか。
■1月2日■
1月1日の日誌は、実は大晦日からの続きで日が変わってからアップした去年の話です。
ラムダがそこそこ歩き出したことで、正月休み中にやることが変わってきました。 計画では冗長構成を使った逆キネで、適正な補正値を学習するプログラムを作るつもりだったのだけど、年末のハード故障と、そこそこ歩き出したことで自分のテンションがハード(メカか。。)になってきた。
大晦日に寝床に入るときも、年が明けたら胴体フレームの見直し設計と、アタマの設計に着手しよう。 あと、beagleboardのケースの設計と、、 てな具合に考えていました。
起きてすぐさまSEMB1200Aのケースの見直しをしたところまではよかったのだが、初詣から帰って来たら状況が一変。 CADが立ち上がらなくなってしまった。
結局、緊急的にInventor LTのお試し版をインストールしてテンショナーフレームの修正設計だけは済ませました。 LTってシートメタル機能はないんですね。 不便だ。。 というより無償3DCADでシートメタルをサポートしているものは無いようで、みんなどうしてるのかな。 手で展開するのはちょっと勘弁だなー。(って、元々仕事でやってたことなんだけど(^_^;)
せっかく見直したSEMB1200Aのケースも部品ファイルすら開けない。(ビュアーでは見れるけど、意味無いし。。(ーー;)
↓テンショナー入れたので、脱力状態だと股広げ状態です。はしたない。。

新型ラムダは、膝が二つあるせいで足長です。 こうして見るとちょっとかっこよい。 ラムダは子供なんで、このプロポーションは要らないんだけどな。肩もいかってるけど、これも要らない。足はどうせ歩くときは曲がるので良いとして、腕は自由度増やしたり、まだ改良する必要があるのでその時に考えよう。 前のラムダのような顔が似合うプロポーションにしたいのだ。このままだと8頭身モナーみたいになりそうで。。。
テンショナーフレームの干渉を対策したつもりだったのにまだ干渉するし、テンション強すぎ。 調整できないのって手抜き構造ですね。 もうちょっと考えて調整できるようにしたいな。
あと今、ラムダはモーション再生ができない。 手抜き逆キネで動いているので起き上がりモーション中の姿勢は姿勢表現できないのだ。 そういや関節角度表現もサポートしているからできるっちゃできるのか。 コントローラを使ったモーションエディタが対応していないので大変すぎてやる気起きないし。
何から手を付けてよいのか、、、わからん。
■1月3日■
とにかく何か片付けなきゃ休みが終わっちゃう。 ということで、腕の制御をどうするか、ヤコビヤンって昔プログラムしたけど、どうやったっけ?とか復習しながら、姿勢を含めた順キネと逆キネを作ることにしました。
マーキュリーは自由度が低かったので逆キネは簡単だったのだけど、新型ラムダは初代ほどじゃなくても自由度が高いので逆キネ関数は複雑。 初代と違って単純な軸構造だし、逆キネで散々苦労した蓄積が活きたようで比較的簡単にできたようです。 基本的なパラメータなら問題なく動いている様子。

じゃぁまぁいい感じでできてるし、歩行安定化の検討と共に腕の設計、頭の設計を始めて「わんだほー」に向けての準備を進めることにしよう。
しゃがませた上にお辞儀させたら急にのけぞって吹っ飛びました。 逆キネ関数の臨界点を超えたらしい。 (^_^;)
■1月10日■
仕事はじめから、(仕事上の)一大イベントがあったので、ウィークデーは不在だったり打ち上げ帰りだったり。。 仕事のイベントも無事完了したので三連休は完全フリーです。
新しいInventorも届いたので新型ラムダの胴体構造の見直しと、シグマの構造見直しと、ビーグルボードのケースの設計と、SEMB1200Aのケースの再設計を進めていました。 構造設計は構造の決定に悩まされるのだけど、バグで悩まされることがなくてある種幸せです。
古いPCをCAD専用にしようと思い、新しいInventorをインストールしたところ、動きません。 うーむ、どうやらグラフィックチップが気に入らないらしい。新しいPCのグラフィックドライバーも動作確認済みリストに載っていない。 もしかしたら大チョンボをやらかしたのか? と思いながら新しい方のPCにインストールすると無事動きました。 よかったー。
どうやらレンダリング機能の強化をしているらしく、設定すれば、床面に設計物が写るところや、それがぼやけているところが再現されます。 こんなんいらねーから安いPCでも動くようにしてくれよ〜(ーー;)
足の逆キネが完成したので下半身の逆キネ関数の整備。 たとえば腰をひねったり、傾けたりすると、股関節の位置が変わるので足の長さやら色々変わります。 腰の姿勢を足の座標に反映する関数を整備せねばなりません。(なので3日の画像は腰部のピッチだけしか試せなかった)
 画像だとうまく表現できないなー。。
画像だとうまく表現できないなー。。
姿勢のテストをやってたら、このラムダだったらミニ電動ガン持ってサバゲに出場できるかも、と思い始めた。 今回、鎖骨(というか、胸を狭めたり広げたりする関節)をつけてみたので少し人間らしいポーズが取り易くなっている。 シグマと一緒で、両足で腰の姿勢を表現できるので銃の照準も取れるかも。
問題は電動ガン持って歩けるかどうかってとこだな。 今でも相当重いので銃持って歩くのはきついかもしれないな。 カメラと手がついたらやってみよう。
そういや、年明けに着手しようと思っていた頭の設計は全然できなかった。
とうとう楽しい楽しい三連休も終わってしまった。 続きはいつできるんだろう。
■1月15日■
相変わらずウィークデーは作業できない。
今日は、ずーーーーっと前からやらなきゃなぁと思ってたZMPのシフトサポートのプログラム。
ZMP規範での歩容生成の実装方法は色々あるだろうが、うちの場合は、目標ZMPを足裏の中心、直行となっている足首関節のポイントとして計算している。 なので、少し前のめりにすれば、、とか、左右のスウィングをもう少し小さく、という調整ができない。 この調整は、目標ZMPを足裏のどこのポイントにもっていくかの調整となるので、それをサポートしなければ、たとえば初期姿勢をまえのめりにしたとしても計算結果は「ちょうどいいところ」に修正されてしまう。 (デタラメな手段としては、質点データをいじって、重心点をずらすというのも考えられるが)
目標ZMP列から歩行パターンを生成する関数は、結構作るのが大変だったので、この上にZMPをシフトさせるような記述を追加するのが大変そうだったのでイヤだったのだ。
新型ラムダが歩けるようになったとはいえ、それほど安定しているわけじゃないのでやっぱZMPシフトは実装せねばなぁということで重い腰を上げました。
そして、、、バグらないように注意をしてやっと直進のケースのみ実装が完成しました。
歩かせてみたところ、、 ふむ。 調整範囲は数ミリってとこ。 10ミリくらい動かすと歩けない感じ。 結構微妙だなー。
ではカーブとかターンの関数にも適用を拡大しよう。
股関節以外の関節もやっぱりガタガタで安定しない。 リンクは偉大だなー。 全関節にテンショナー入れたい。
■1月15日(おまけ)■
カーブとターンもZMPシフトできました。
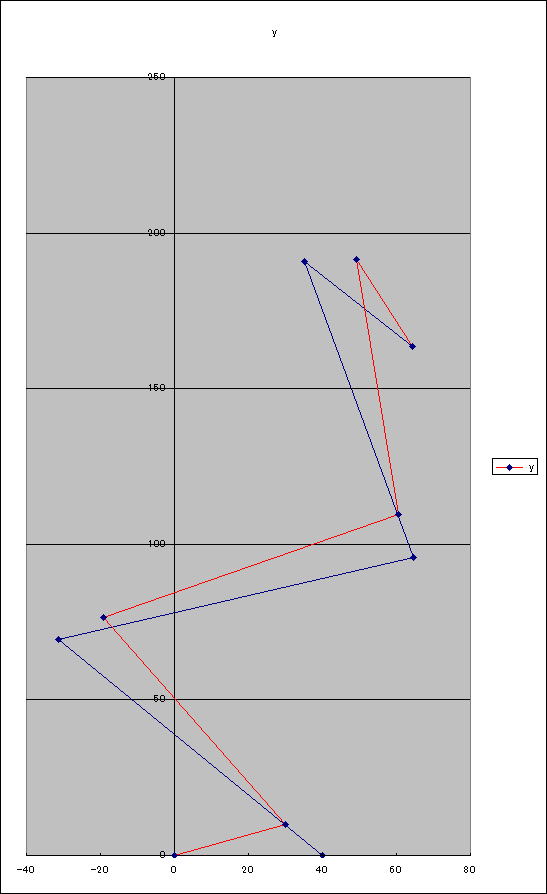 青がZMPシフトしない場合、赤がシフトあり。内側に10mm、前に10mmシフト
青がZMPシフトしない場合、赤がシフトあり。内側に10mm、前に10mmシフト
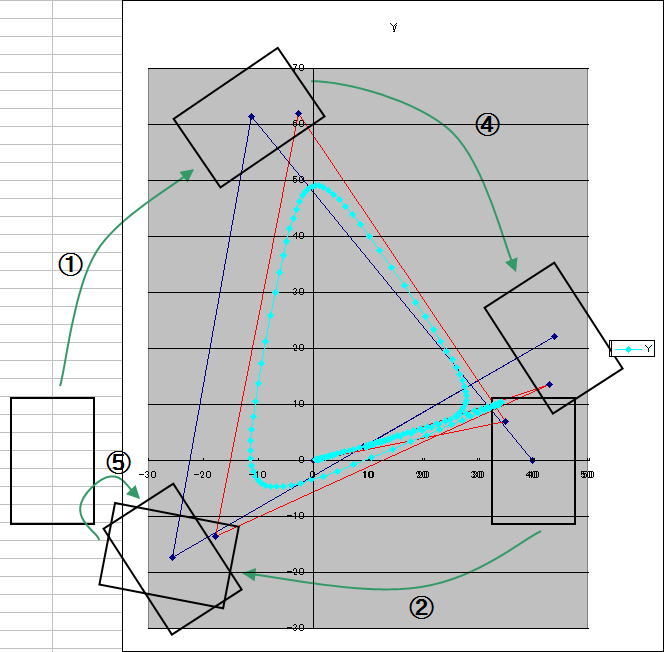
ターンは分かりにくいので、足跡と、重心軌道も入れてみました。青線の場合も赤線の場合も足跡の位置は変わりません。
■1月16日■
ZMPのシフトができたので、ビーグルボードのケースを作ってました。

アルミ板厚1ミリなので自分で切り出しから加工。 角穴が多いのがちょっと大変だけど、1ミリならハンドニブラーも使えるし、小さな穴はヤスリで広げる。
曲げ機がぼろぼろになってきていて、曲げ加工が大変なんだけどなかなかうまくできたー(^.^)
と思ったら、基板がはいらねぇ。 ケースが小さい。。 設計ミスったか? と思ったが、どうもプリントアウトした時にプリンターが用紙に収めるためにちょっとだけ縮小したらしい。 サイズ調整「なし」というオプション指定にしたら2ミリほど大きく印刷された。 これがアタリなんだろうな。(ーー;)
1ミリのアルミ板はもう足りないし、せっかくだから少し改良設計して次の休みまで持ち越しです。
CADをインストールしたあたりから、Windows7が四六時中HDDをカリカリさせて動作がメチャ重。 リソースモニターで動きを見てもよーわからんがディスクアクセスは頻繁に実行してるなぁ。 以前はどうだったっけかなぁ。 治らないかなぁ。 ものすごくストレスある。
■1月19日■
HDDへのアクセスが延々と続いている異常状態は依然として続いている。 カリカリしている間は漢字変換もままならない状態です。このかりかり、結局なにをやっているのかわかっていないのだが、再起動するとブート時に必ずハードディスクエラーで停止することを発見。どうやらハード故障らしい。 するとHDDの中身がだんだんと失われている可能性もあるのでさっさと修理に出すことにする。 7月に買ったばかりなんだけどな。 使って半年だからアラが出る頃か?
家用のDELLパソといい、はずれが続いている。。(ーー;)
金曜日〜土曜まで出張で、PCを引き取りにくるのが日曜日なので今晩はバックアップデー。 しばらくバックアップしてなかったので大変です。 あ、このサイトのデータも更新したからバックアップしなきゃな。
2月20日にサバゲが計画されているのだけど、参加が怪しい。 怪しいっていうのはロボットが未整備という意味で。 新年早々CADが使えなくなり、やっと復旧したと思ったら今度はPCが。ビーグルボードを使った無線カメラが立ち上がっていればそれを試すためにも参加って感じにもなるところだがそれもまだまだだし。。 どうも悪い流れが続いてしまっているような気がします。
新年早々すっころんでるなぁ(-_-;)
■1月23日■
出張で北海道に行ってました。 北海道は初上陸です。
雪がある環境での機器の性能評価ということでこんな感じのところで作業してました。 気温はマイナス2℃くらいで、風がなかったので寒さ的にはまだまだだったらしいです。 来週からは女満別から陸別というところに入って次の測定をする予定だけど、そっちは別働隊にお願いすることになりました。 雪に慣れてない人だと遭難しそうな勢いの場所らしい。

で、開放されたので夜のさっぽろに。

ぶらぶらとすすきのまで出て食事する店を探していたんだけど、風俗の客引きがうるさくって仕方無い。 華の舞とか行きたくないねぇ、っていうことで地元の店っぽいところに入ったけど失敗でした。 大した料理ないし、なんか高いし。
口直しに途中で見つけた立ち食いのすし屋に行ってみることに。 お好みで頼めるし、べらぼうに安いしで一人2000円くらいで腹いっぱい食べました。 食べ終わったあと振り向くと、向かいの店は同じ値段で椅子がついてた。 立ち食いだから安いってわけじゃないのね。
次の日(22日)は時間が空いたので、市内観光に。
って言っても北大ぶらぶらしてお土産買っただけだけど。
同行者に北大出身者が居て、じゃ、北大でも行きますか、ってことになりました。 なんのセキュリティもなしに入れるからいぶかしんでいたら、観光スポットなんですね。 なるほど、ポプラ並木とかクラーク博士の像やらいろいろみどころあるしね。 売店には新渡戸稲造のブロマイドが売ってました。 誰が買うんだろう。
私がウニ丼食べたいっていうので、同行してたヤツが観光で北海道来た時に寿司を食った店に行くために二条市場へ。 観光客向けのお店が並んでいます。正直高いのか安いのかわからんのだけど、北海道らしい土産ってことで、タラバガニをお土産に。 今日鍋で嫌というほど食べました。ちょっと食傷気味。

ウニ丼はカニを買ったお店で教えてもらったすし屋っぽい料理屋に行って食べました。この日のお勧めがウニ丼。 この値段でこのウニが食べられるなんてお客さんは幸せ者だよ!みたいに言われたけどやっぱ高いのか安いのかわかんない。 でも、これは美味かった〜。 おかみさんに食べ方教わったんだけど、卵かけご飯みたいにウニをつぶしてご飯と混ぜて食べるんです。って、おいしいけどたまごかけご飯みたいな味になるなぁ。

雪祭りに向けて工事中。何になるのかは不明。 大きな雪像は中に骨組みが有って、張りぼてになってるんですね。

半年前に買ったパソコンは修理に引き渡すことに。 仕方ないので古いパソコンにソフトインストールして当座の作業ができるように設定してました。
でも、CADはこのパソコンじゃ動かないんだよね。 どうにも落ち着かなくてテンションが上がらない。
修理には10日程度かかるらしい。10日程度のために、古いPCに開発環境を構築するのはなんだなぁと、しかし、その間ホントに何にもしないってのもなんなので、二つのひざ関節にもテンショナーを入れる改造をすることに。 出張する前の夜にテンションスプリングを固定する部品を設計して工作する準備をしておきました。
今日はその作業をすることにしていたのだけど、どうも考慮不足でうまくない。 更には工作精度の問題で作った部品もうまく取り付かない。部品追加だとうまくいかなそうなので、一部フレームを作り直さなくてはならないようです。 これ以上はCADがないと進められない。
しゃあねぇなぁ、開発環境の構築やるかな。。。
■1月29日■
北海道の次は、高松に出張。 四国は何度も行ったことがあるのだけど香川県はもしかしたら初めて。
こちらの営業と落ち合って、昼飯には事務所近くのうどん屋でうどんを食べました。 このへんはうどん屋だらけで安くて美味い。 とにかく高い店や不味い店はやってけないのでどこも美味くて安いそうです。 最近じゃ値上げがあってかけうどん一杯120円くらいだけど、以前は90円くらいだったとか。
仕事が予定通り早く終わったので、んじゃ、帰路につきつつもう一杯讃岐うどんを食べに行こうかなと、空港行きのリムジンバスの時間より1時間くらい前に事務所をあとにしました。
高松って行っても高松駅じゃなくて栗林公園近く。 栗林公園というはさっぱり知らなかったのだけど日本一広い庭園らしい。入場料400円。
でも、周りは閑散としていてうどん屋がない。 リムジンバスの時間まではそんなに無いのであんまり派手に動き回れないので、堅いところで栗林公園駅に向かうことにしました。
ところが、栗林公園駅について愕然。。 なんかものすごくシンプルで駅前だからといってお店がたくさんあるってわけじゃなさそう。 時間もなかったので諦めてリムジンバスで空港でうどん食べました。 かけうどん一杯350円、 でも美味しかった〜。
ちなみに喫茶店はあちこちにあったんだけどあれがもしやうどん屋だったのか??(んなわけないか)
出張から帰ると修理に出していたノートPCが帰ってきていました。 マザーボードとHDDが交換になったそうです。 ブルースクリーン・HDDカリカリ・バッテリー故障診断の三重苦だったのでマザボが怪しいとは思っていましたが。
HDDも交換になったのでアプリはすべて再インストールです。
Windowsアップデート、アンチウィルス、Inventor、そしてCygwin(+SEMB1200A開発環境)、VMWare、eclipce、その他のアプリ、そしてOfficeとホームページビルダーをインストールしてやっと日誌の更新ができるようになりました。 ふぅ。
当面の最低限のソフトはインストールできたので、明日はロボット開発に入れるはず。 あ、プリンタードライバがまだだ。
今日は一日CADにかじりつきでした。
新型ラムダは、歩けるには歩けるのだけどどうも不安定。 日によって歩けたり歩けなかったりします。 原因はやっぱりリンク脚とは違う再現性の悪さなのだろうと踏んで主要な関節にテンショナーを入れようとしています。
いままで負荷に対して補正値を入れることで再生精度を上げるようにしてきたけれど、PID制御のサーボでそのような処理をすることはやはり無理がある。 やはりサーボのトルク内で動作させねばいかんともしがたいということらしい。 それの解が今のところテンショナーです。
加えてシグマ。 シグマでサバゲに参加しているのだけどこちらもいつまでたっても仕上がらない。 こちらも冗長関節にしてちょっといい感じになってきたので本格的に構造の見直しをしたいと思ってます。
手が動かしやすい構造設計にばかり作業が行ってしまうのは、次は「腕の制御を考えねばならない」からです。 それが停滞しっぱなしだからです。
今回のラムダは腕の構造がちょっと変わっていて、肩がだっちゅーの関節です。これだと後ろに腕が回らないので起き上がりのときにはエビゾリになるか、上腕を後ろにひねって上体を起こす必要があります。
そのような動きを逆キネで生成する方法を実装せねばならない。
手先の姿勢まで指定すればすぐにでも可能なんだけど、それだとモーションを用意するのと変わらないので意味がない。
腕の動かし方についてはずいぶんと前からどうやって取り組めば良いのかわからなくてもんもんとしていたのだが、今年のテーマが冗長関節制御ということで本格的に考えねばならないときが来てしまった。
冗長関節構成での逆キネといえばヤコビアンの応用(?)である擬似逆ヤコビアン行列というのがあって、冗長構成での最適解(各関節の動作速度・加速度がもっとも小さくなる角度組み合わせ)を生成する手法があるのだけど、あくまで幾何的解決なので各関節の可動角度範囲までは対応できないのです。
どうやら可動角度範囲を拘束条件として解く手法があるらしいのだが、いまんとこ具体的にどうするのかわからん状態です。
やりたいのは幾何的な解決ではなくて、誤差逆伝播手法のような方法なんですけどね。 考えねば。