 �@�@
�@�@
�J������(30)
�g�b�v�֖߂�
�J�������C���f�b�N�X��
�O�̃y�[�W��
���R���V����
�܂��܂��d���͉��サ�Ă���̂ł����A���̋x�݂ɏo���邱�Ƃ��Ȃ��̂œy���Ƃ��x�݁B�@�C�����͂������������Ă���̂Ő��_�q����ǂ��Ȃ��ł��ˁB
���������̋x�݂Ȃ̂ŃV�O�}����C�ɐi�߂܂����B
�܂��͂Ƃɂ��������悤�ɂƌ������ƂŁA�y�j���̂����ɕ��s�̂��߂̊�{�I�d�g�݂Ƃ��āA�e�r�̊�{�p����\���ϐ��Ƃ͕ʂɓ����\���ϐ���p���āA�r��{�����̕��s����A�@�����ɓ����đ��������グ�Ė߂��A�Ƃ�����A�̓����g�ݍ��݂܂����B
�����č����A�Ƃ��Ƃ��R�������g���ċt�L�l�ŃV�O�}�������n�߂܂����B�@�A�����s����d�g�݂�g�ݍ��߂ĂȂ��̂ł܂�1�����}�j���A���ŃR�}���h����`���Ȃ̂ł����B
�O��̃V�O�}�͋r3�{���Z�b�g�ɂȂ��ĂQ���œ��삷��P���ȕ��e�������̂ł����A�݂�Ȃ����r�����n�߂����A����ł͖ʔ����Ȃ��̂Ŋe�r�̓��삪�قȂ�U���œ������Ă݂܂����B�@����͂Ȃ��Ȃ����[�V��������}�l�ł��Ȃ��ł���[�B�@�Ȃ�ƂȂ��O���b�v�������悤�ȋC�����܂��B�@�����ƋC�̂��������ǁB�B
����̓R���g���[���̃A�i���O�X�e�B�b�N���g���āA�S���ʈړ������������̂ł����A���s�̕������ς�邱�Ƃł̃��[�V�����̂Ȃ������̕���g�ݍ��߂Ă��Ȃ����A�����R���g���[���̐ڑ����܂��ł��Ă��Ȃ��A�}�C�R���ނ����{�b�g�Ɏ�������Ă��Ȃ����Ă��ƂŁA���R�ɕ������邱�Ƃ͌�ɂ��܂��B�@�܂������������ɂ͈ړ������̃x�N�g��������ė^���������ɕ����悤�ɍ�����̂ŁA�܂��ł��������R�����B
�������������s���g�ݍ��߂Ă��Ȃ��B�@����͒����{����Ƃ������삶��Ȃ��āA�J�[�u�����������̂ŁA��]���S���W���w�肷�邱�ƂŐF��ȃJ�[�u������������Ǝv���܂��B�@���{�b�g���S�ɉ�]���S��ݒ肷��ΐ�����s�ɂȂ�̂ŁA���삾����g�ݍ��ނ��Ƃ͂��܂���B
�~�j�d���̏Ə��p�̃T�[�{�͑g�ݍ��܂Ȃ����Ƃɂ����̂ŁA�p���ŏƏ������킹�邱�ƂɂȂ�܂��B�@������O��̃V�O�}�ł͑g�ݍ��܂Ȃ��������ƁB
�߂�ǂ������Ȃ��`�A�Ǝv�������ǁA����Ă݂����Ȃ�ł��܂����B�v�Z�ʂ����炷�H�v�����Ă��Ȃ��̂ŁA�܂��͓���m�F���x���ŁB�@Coron�̌v�Z���x�����E�ɒB������i���Ă������Ƃɂ��܂��傤�B
�����^���ʂɌ����Ă���ꍇ�A�@�E���̂����˂点�ă~�j�d���̌�����ς��Ă���Ƃ���B�@�킩�邩�ȁ[�B�@���̕����e�������������Ă��銴�������邯�ǁA�J�����̈ʒu�̊W�ł���ȕ��Ɍ����Ă��܂��B
�@�@
�Ə������Ȃ���������Ƃ��ł��܂��B�@����A�ł���悤�ɂ��܂��B
CPU�̗��p�����҂����߂ɁA�v�Z��������f�[�^���X�g�b�N���āA���荞�݂��炻���ǂݏo���`���ɂ��Ă݂܂����B1000�u���b�N�̃o�b�t�@��p�ӂ����̂����ǁA18�̃T�[�{�́A20ms���̃f�[�^���X�g�b�N�����1�b�������X�g�b�N�ł��Ȃ��B�@�ǂ��܂Ńo�b�t�@�L������̂��ȁ[�B
���R���P�Q����
�������ɂ������Ď������邱�Ƃ͊y�����̂����A�������A���11���߂��B
�������イ�Ԃ�3�������B�@���{�ŃT�o�Q�ɊԂɍ���Ȃ���[�B�@�܂�SPI�C���^�[�t�F�C�X���g���Ă��Ȃ��̂ł��̂܂܂��Ɩ������c���ł��Ȃ��B�@�ň��L�[�{�[�h�ő���Ƃ������ƂɂȂ�B�@����͔��������ȁB�@�d���Ď��̂��߂�ADC���K�v�����A�c�e�J�E���^�[���������Ȃ���Ȃ�Ȃ���ȁB�@���{�ŃT�o�Q�A�Ȃ��Ȃ���ςł���B
���K�����y�j���͂Ȃ�Ƃ��t���[�ɂ��܂����B�ł��A���K��ɍs���ׂ��Ȃ̂��ƂŊJ�����ׂ��Ȃ̂��Y�ނƂ���B�@�A�C�{�ŊJ�����Ă����Ƃ��Ɏ����������s�����ύX���̓����̎������v���o�����̂Ŏ����������̂����o���ĂȂ��B�@���ꂪ�o���Ȃ��Ɩ������c�őS�����ړ����o���Ȃ���[�B�@���K��ɓ����Ȃ����{�b�g�����Ă��������Ȃ����A�A�A�d���Ȃ�������K����ł�邩�I�Ǝv����������邪�A�J���i�߂�Ȃ�Η��K�����莩��ŖفX�Ƃ����������̂͊m�������B�ł��A�A���݂ɂ��s���������Ȃ��B�@�[������������ɂ͑����͉����B�Borz�@����������B�B�B
�@
Coron�̓d���R�l�N�^��JST�̃l�b�g�V���b�v�Ŕ������̂����A�R���^�N�g���ׂ獂�B�@1��22�~��������30�ł��������Ă���Ȃ��B�@2�ł����̂ɁB�B�@�܁[����[�˂��Ȃ��Ǝv���ă|�`���Ƃ�����������ƁA�}���c�Ŕ����Ă�̌����܂����B�@�}���c����10�P�ʂŔ����Ă܂�����B�@�E�E�E�����ƕ��i�オ�ꏏ���炢�ł����B(^_^;)
G���{�̖����@��5V��~�������Ă���̂ł����A5V��p�ӂ���̂��ʓ|���ȁ[�BCoron��3.3V�쓮�Ȃ̂ł����A�@����ł��ˁB���e�ʂł�������5V�o�͂�����ƕ֗��ł��ˁB�@�~�����ł��B�@���ꂩ�A�d���d�����̂܂o���[�q����������ȁB
�@
�W���j�[���e���V�����_�E���ƁA�A�A�@�T�b�J�[������Ă�ȁ[�Ǝv���Ă����ǂȁB�@�����胂�`�x�[�V�����_�E���̍ŋߗ�ɖ��O�����Ȃ��ł�(^_^;)�@�m���ɕ������������Ă�Ƃ��날��̂ł����B�@���܂͎d�����Z�����̂���Ԃ̏�Q�ł��B�@���{�b�gOS�����������w�����肵�ă��`�x�[�V���������グ���̂Ɏ��R���d���Ă��܂������ł��B
���R���P�R����
���{�ŃT�o�Q�̊J�Î������l����ƈꍏ�̗P�\���Ȃ��A�Ƃ������Ƃŗ��K��ɍs���̂͒��߂āASPI�̗����グ����邱�ƂɁB�@�C���^�[�t�F�C�X�̗����グ�͂������Ԃ�������܂��B�@�������1���������Ă��܂����B
SPI�̃T���v���\�[�X���Q�l�Ƀv���O�������悤�Ƃ����̂����AGPIO�̐ݒ肪�C�}�C�`�����ł��Ȃ��B�@SPI���ƁA����̓}�X�^�[�Ȃ̂�MISO�͓��́AMOSI�͏o�͂̂͂��Ȃ̂����A�ǂ���������s���ݒ�ɂȂ��Ă���H�H�H�@�����́ASTM��SPI�̓}�X�^�[�ƃX���[�u�쒆�ɓ���ւ�����ł���̂ŁA���͐ݒ�o�͐ݒ�̓}�X�^�[�E�X���[�u�Ő�ւ��d�g�݂ɂȂ��Ă���A���̂悤�Ȏg�����̃s�����I���^�l�[�g�t�@���N�V�����ݒ�Ƃ������Ƃ炵���B
NSS�i�X���[�u�Z���N�g�j�Ƃ����M���������āASTM�ɂ̓\�t�gNSS�Ƃ����̂ƃn�[�hNSS�ƌ����ݒ肪����B�@�\�t�gNSS�Ƃ����̂��悭�킩���̂Ńn�[�hNSS��I��ŁANSS�M�����C�l�[�u������X���[�u�f�o�C�X�������悤�ɐڑ������̂����A�����Ȃ��B�B
�����Ȃ��̂ŁA�F�X�Ɛݒ��ς��Ă݂āA�\�t�gNSS�ɂ���Α��M�͏o����悤�ɂȂ����̂����A��M������������ł��Ȃ��B�@��������m���ARPU-10�ł�NSS�̗������A150us�ʂ͋Ȃ��ƃ_�����Ƃ��������Ƃ��������Ȃ��B�@�Ǝv���o���ASEMB1200A�œ���m�F�B�@������M�����K�{�Ƃ������Ƃ��킩��܂����B
�����Ă���Ɛ�ق�G���{�����@����f�[�^�����o�����Ƃɐ������܂����B�@10�����珉�߂�21���B�@�r���A�e���r�^��4�{�ƒ��сA�Ӕт��͂��̂Ŏ�����5���Ԃ��炢���ȁB
���āA���ꂩ��SPI��DMA�Ŏ�M�ł���悤�ɂ��˂B�@���钆�ɂł��邩�ȁ[�B
�@�@
���ƁAADC�𗧂��グ�˂Ȃ�Ȃ��B�@���{�ŃT�o�Q��ADC�͕K�{�ł��B
�@
�@
SPI��DMA�Ŏ�M����̂͂�߂܂����B�@SPI�Ɋ��蓖�Ă��Ă���DMA�`�����l����UART1�Ƃ��Ԃ�̂ŁA�̂��̂��������ƂȂ肻�������ASPI�̓]�����x�͏��Ȃ��Ƃ�3Mbps�œ����܂����B�@�X�ɂ͓]���f�[�^�ʂ���������8byte/20ms�Ȃ̂ł킴�킴DMA�]������K�v�͖����ł��傤�B�@NSS���C�l�[�u�����Ă���̑҂����Ԃ����̓��[�v���̂��C���������̂Ń^�C�}�[���荞�݂ɂ��܂����B�@�@���������ƂŃ^�C�}�[���l�߂Ă�������50us�ł��������̂ŁA��������荞�ݎg���K�v�Ȃ�������������Ȃ��ł��B
�f�[�^�ǂݎ��̐��������Ⴂ�̂ŁA�I�V���Ŋm�F���悤�Ƃ��āANSS�Ƀv���[�u�Ă���ǂݎ��G���[���������܂��B�@�ǂ����LVCC��VCC���W�b�N����������Ȃ��̂Ŏ��s����݂����ł��ˁB�@���x���V�t�^���K�v�Ȃ悤�ł��B�@�f�[�^���͖��Ȃ��݂����Ȃ�ł����ǂˁB�@�i������H�̊W���ȁ[�H�j
STM�̃C���^�[�t�F�C�X�n��ADC���c���̂݁B�@���[�^�[��ONOFF��H�Ǝc�e�Z���T�[��H���������ƍ��˂B�B�B
�@
�����̎d���A�����I���Ζ����R���g���[���őS���ʈړ��܂Ői�߂�͂������ǁA�A�������낤�Ȃ��B�@���A�����͎d���Ȃ�ł��B(�[�[;)�B�B�B�B
���R���Q�T����
�C�����Ƃق�2�T�ԂԂ�̓����X�V�B�@�d������l�߂ɓ����ĉƂɂ��鎞�Ԃ��ɒ[�ɏ��Ȃ��������̂ŁB�B�@�ނ��胍�{�����̓��͎d���x�݂ɂ����̂����ǁA���̓��ȊO�͂�����YRP���̌������ɋl�߂Ă܂����B
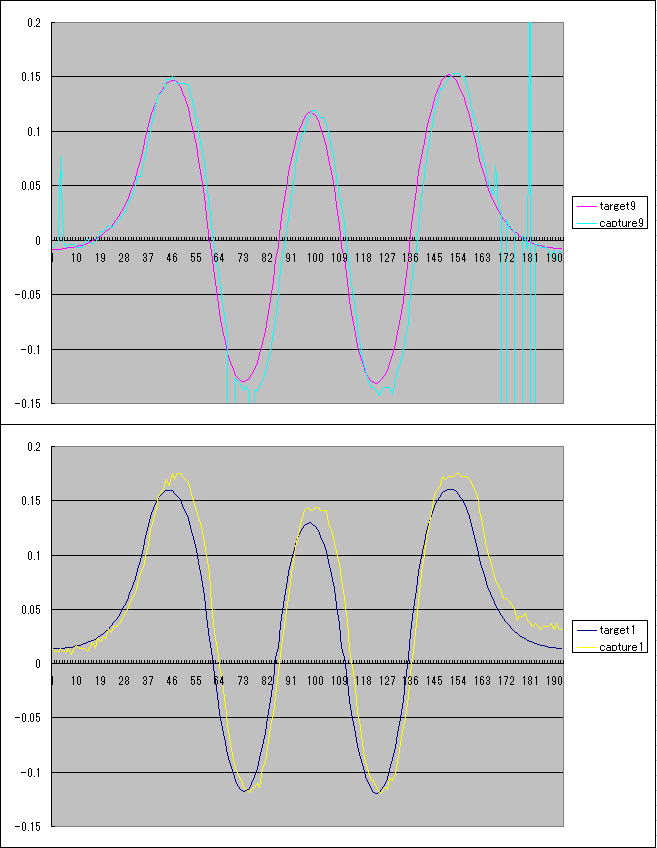
���������ɃV�O�}�̐i�������o�C�̂ŁA12�����炢�ɋA���Ă���f�o�b�O�����肵�Ă����̂ł����A����ƑS���ʕ��s�̎������ł����悤�ł��B�@�����ɐ�����s�������ł��ĂȂ����ǁB�B�B�@(^^�U
�������x�݂�������ĎO�A�x�A�@�ق��ɗp��������̂����ǂ��̋x�݂Ɋ撣���Đi�߂܂��B
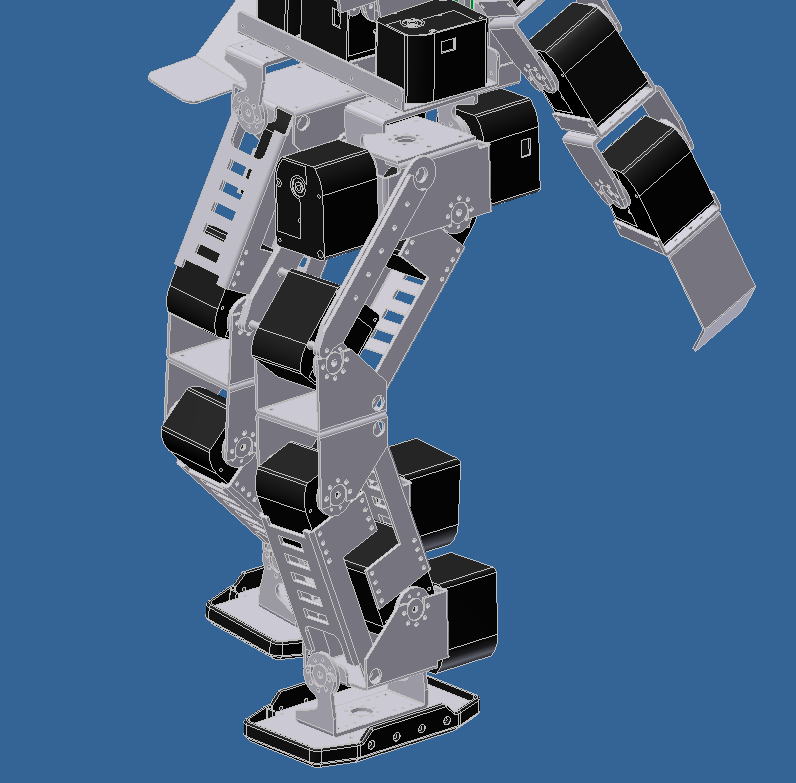
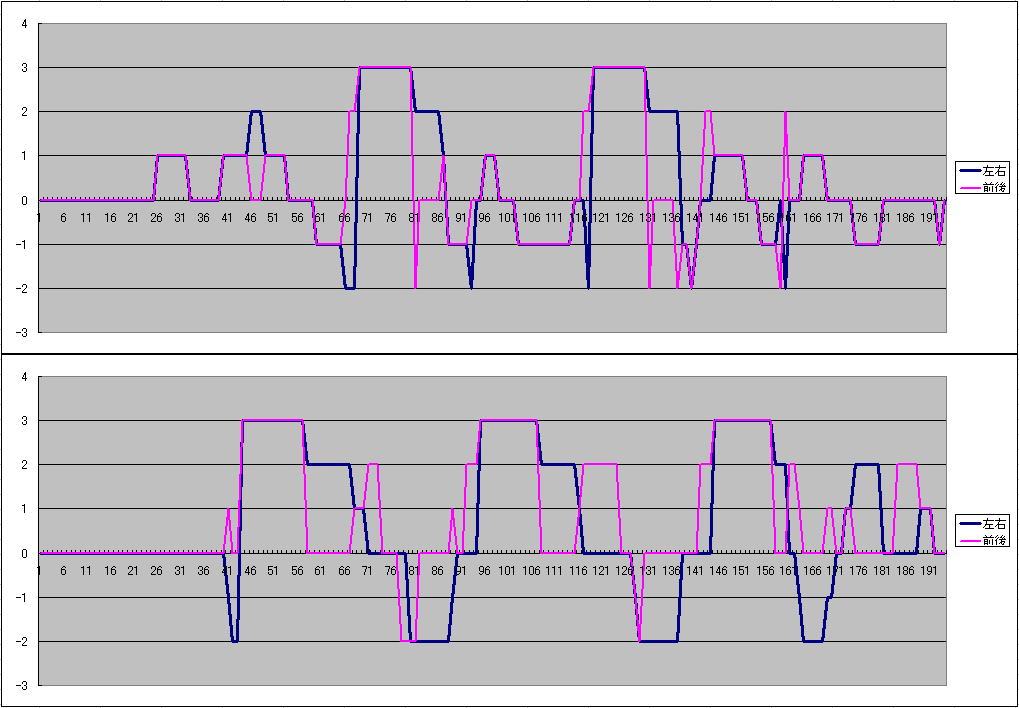
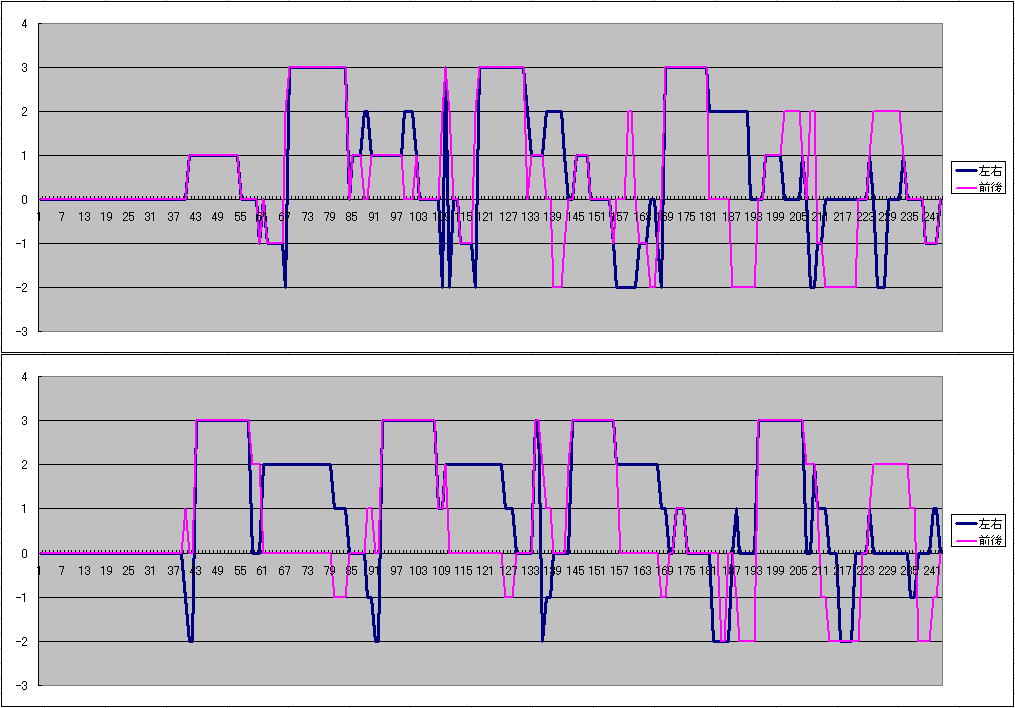
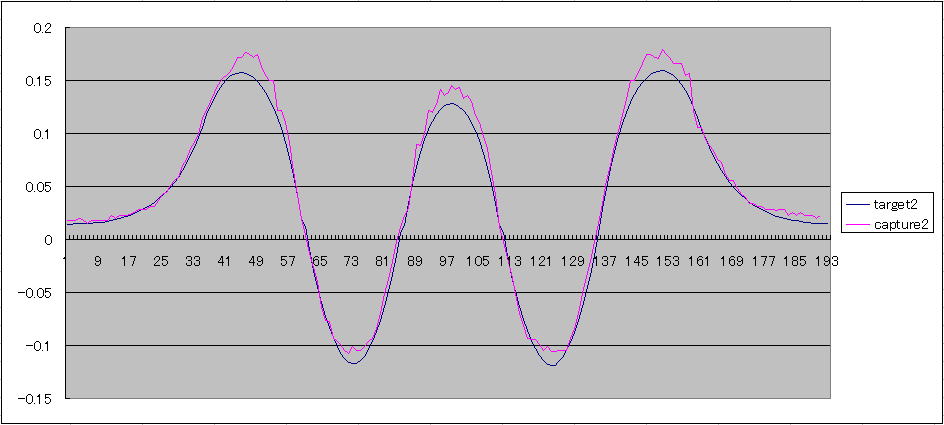
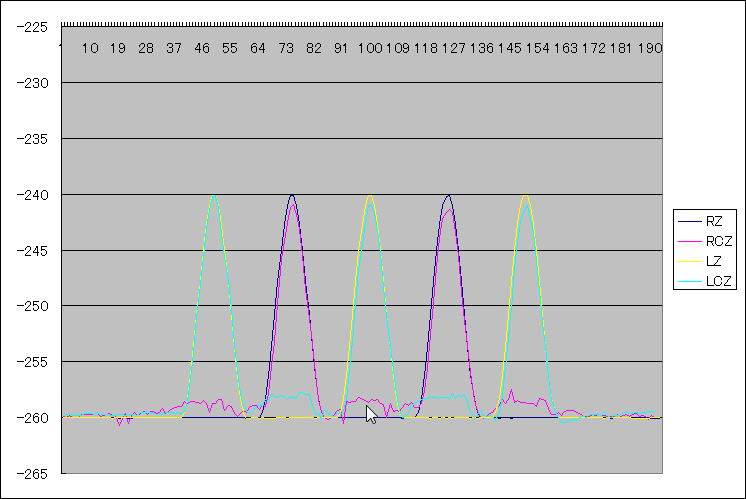
�v���Ԃ�ɃV�O�}�������̂��݂܂����B�i�O�Ƃ͕�������������ƈႤ���ǁj�@�Ƃ̒����ƌ��\���т��ѓ����Ă���悤�Ɍ����Ă��A�L���ꏊ�œ������Ɨl�����ς���ł���ˁB�@�����قǒx��������B�B�@�Ƃ̒����Ɩ\�����Ă��炢�̑��x�œ����悤�ɂ��Ȃ���L���ꏊ�ł͂��т��ѓ����悤�ɂ͌����Ȃ��ł��傤�ˁB
�@
�����̋A��ɖ{���ɂ���āA�ӂƖڂɂƂ܂����u�C���^�[�t�F�[�X�v�A�g�ݍ��݃\�t�g�̌����������ǁA�u���A���^�C��OS���g�����v�Ƃ������W�̂悤�ł��B�@���������ǂ݂����̂����ǁA�ǂ����^�[�Q�b�g��CPU��RTOS���ڐA���ē������ă\�t�g���J������ƁA�A�@OS�̈ڐA�������ł����Ęb�̂悤�Ȃ��ǂ��̗����ł悢�̂��ȁH�@�y���t�F�����C���^�[�t�F�[�X�̃h���C�o�[�͂��ꂪ���̂��낤���B�B�@�X�P�W���[�����O�Ȃ͕֗��Ȃ̂��낤���ǃf�o�C�X�h���C�o�[����Ԃ̖��̂悤�ȋC������̂����Ⴄ�̂��ȁH�@SEMB1200A��Coron��OS�Ȃ��ł̊J���Ȃ̂����A����ς�OS�͕K�v�Ɋ����܂��B�@�X�P�W���[�����O���f�o�b�O�����͂���ς��ł��ˁB
�@
���{������̑ł��グ�ŃW���j�[�Ɂu�����_�̍����v�͍ڂ��Ȃ���ł����H�ƕ�����܂����B�@�������ڂ���قǂ̊����x���Ȃ��̂ōڂ��悤���Ȃ��̂��^���Ȃ̂����ǁA�킩��Ȃ��l�ɓ`���悤�ȓ����̏����������Ă��Ȃ����Ƃ������B�@���C�����\�t�g�J���ɂȂ��Ă邩��摜�╶�͂ɂ��ɂ����̂���`���ĂȂɂ��Ȃ��킩��Ȃ������ɂȂ��Ă��܂��Ă�̂��C�t���Ă͂����ł����ǂˁB�@�ꉞ��3������̎������ǂ��̎肪����ɂȂ邭�炢�̋C�����ł͏����Ă܂��B
������^��Ȃǂ���X�p���C����BBS�����[�������炦��Δ������܂��B
���R���Q�U����
�����͋x�݂���������̂ŁA������V�O�}�̍H��B�@���ƌ����Ă��A���̐����s���̂������A�N������10���O�B�@���i�Ȃ�x�݂̓���7���ɖڂ��o�߂��Ⴄ�͂��Ȃ̂ɁA�A��͂��ꂪ���܂��Ă���̂��B
SPI�̃C���^�[�t�F�C�X�ɂ̓��x���V�t�^���K�v�̂悤�������̂ŁA���x���V�t�^����쐬�B�@���łɂ��̊����RS485��ւ̐ڑ��ƁARS485������5V�d���̋������s���B
Coron�̓d�����o�b�e���[�����Ƃ��邽�߂�DCDC�R���o�[�^����̓d���P�[�u�����쐬�B�@����ŃV�O�}���o�b�e���[���삳�����͂����������B
Coron��USB�ł̃v���O�����������݂Ȃ̂ŁA�������݂͗L���B�@USB�̉����P�[�u���͎����ĂȂ������ȁ[�B�@���������ɍs���Ȃ��ẮB
���P�[�u�����\��Ă��ꂢ�ɕ��ׂ��Ȃ������B�@���ꂼ���≏���āA�V�O�}�̃{�f�B�[�ɋl�ߍ��ނ���B�@

���x���V�t�^����ꂽ���Ƃ�SPI�̒ʐM�͈��肵�Ď�M�ł���悤�ɂȂ�܂����B�@�K�v�Ȃ̂�NSS�M���̋��������������̂����ǁA���ł�����SCK�i�N���b�N�j�ɂ����x���V�t�^��ʂ��Ă������B
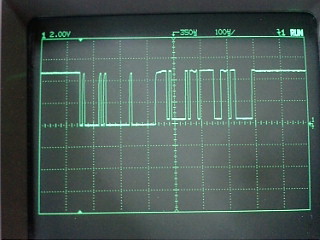
�ŁA�I�V����SCK�M�����m�F����Ɓ�
 �@���@�ϊ��O
�@���@�ϊ��O
 ���@�ϊ���
���@�ϊ���
���Ă��ƂŁA�v���A�b�v��R���ł��������炵���B�@����Ȃ�ł������Ɠ����ȁ[�B�@���Ă��A���ꂾ�ƃ��x���V�t�^�����Ȃ����̕����������B�@�E�E�E�E�������Ⴈ���B
�ł́A�V�O�}�����W�R������ł���悤�ɂ���v���O�����ɒ��肵�܂��B
���R���Q�W����
���W�R�����삵�����ƃ}�C�R���{�[�h��C���^�[�t�F�C�X�{�[�h�����������Ă����Ԃ��ƕs�ӂɃV���[�g���Ă��܂����肷�鋰�ꂪ����̂Ŋ댯�ł��B�@�܂��̓V�O�}�ɐ���{�[�h�ނ𓋍ڂ���悤�ɂ��܂��傤�B
����Ƃ����܂łł����B�@���ǐ���{�[�h�ނ̎����܂ł��ǂ蒅���Ȃ������B�@�x�[�X�ǐ^�ɃK�����������Ă���̂ŁA����{�[�h�͗��ĂĎ������Ȃ���Ȃ�Ȃ��̂����ǁA�ȒP�ŏ�v�ȍ\�����v�����Ȃ��B�@�Y��łĂ��d���Ȃ��B������Ⴆ�I�@�Ǝv���Đ}�ʈ��������ǁA12���߂��Ă��特�o����Ƃ͂ł��Ȃ��̂Œf�O�B�T�o�Q�܂ł̋x�݂͎��̓y�������Ȃ��̂����A�x�߂�̂��낤���B
�@�d���K���̃g���K�[�͂��܂������܂����B�@�茳�ɂ��镔�i�����ō��܂����B

�K���ɓd���K���̃��[�^�[���Ȃ��œ���m�F������������ǁA����i�d���K���j���ă��[�^�[�t��]���������ꂽ�肷��̂��ȁB�@�C�ɂ��ĂȂ������B�B
�i�����Ă�悤�ł��ĂȂ��Ȃ��B�B(�[�[;)
���R���Q�X����
����ƃR���g���[���őS�����ړ����ł���悤�ɂȂ�܂����B�@�Ȃ����������ȁ[�B�@�܂����삪�ł��Ă��Ȃ��̂ŃA���ł����ǁA�܂�����͂����ł��������R�Ȃ̂ł悢�ł��傤�B����1���Ԃ�����ΐ�����g�ݍ��߂�͂������ǖ������d���Ȃ̂Ŏ���ɌJ��z���܂��B
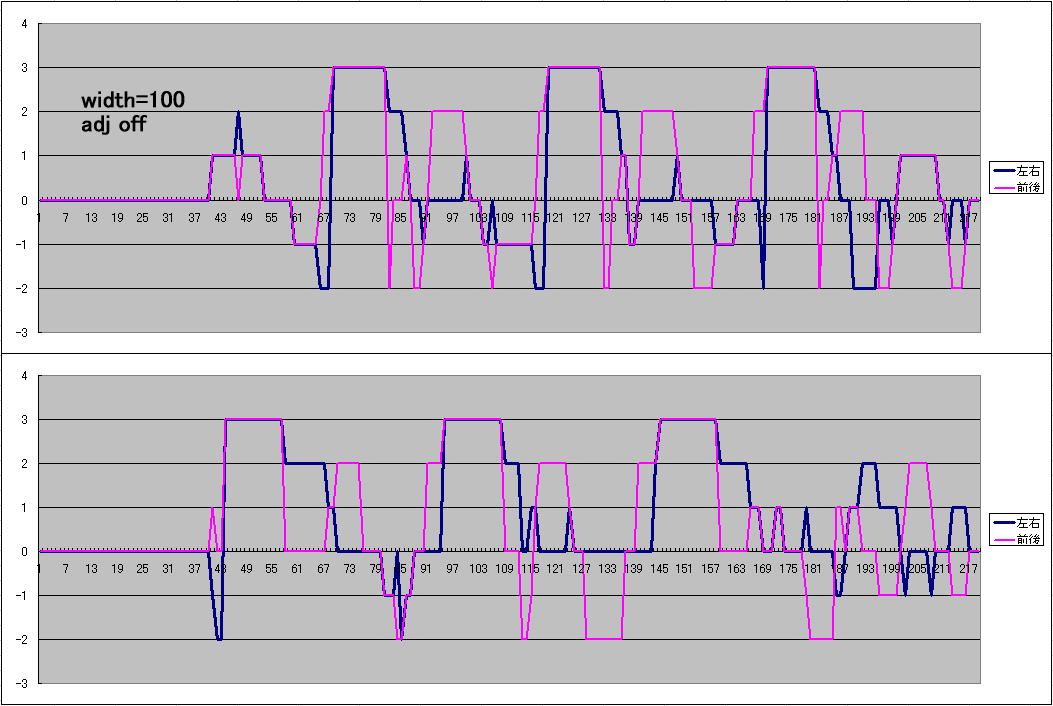
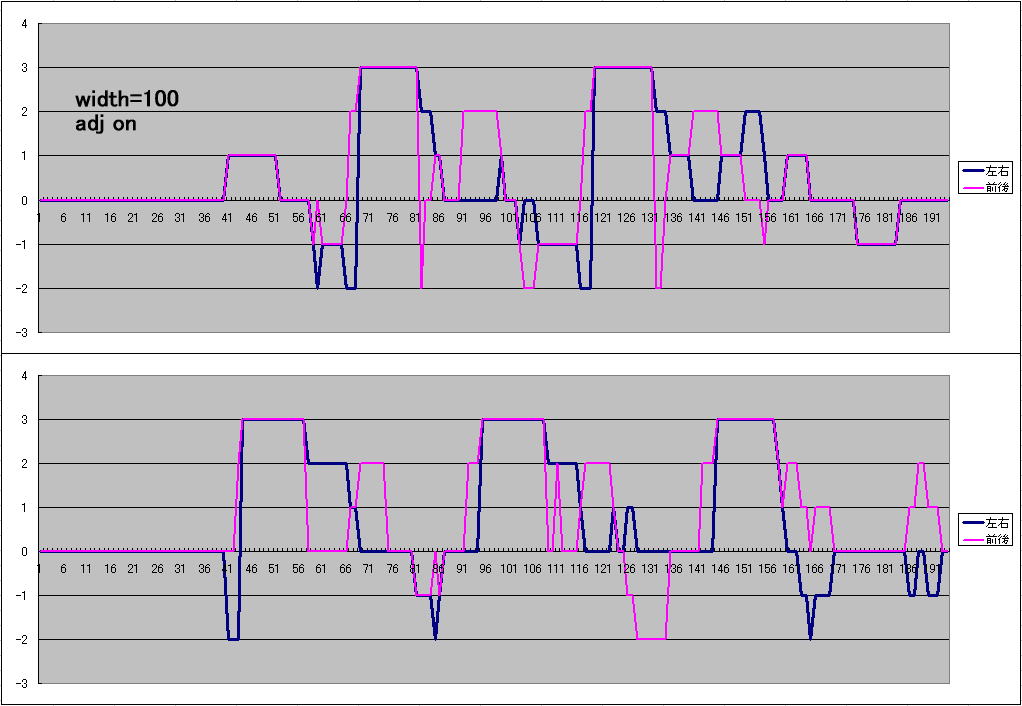
�ȑO�̃V�O�}�̕��s�ƈ���āA�U�{�r���ׂĂ�����ē��삵�܂��B�@��萶���I�ɂȂ������������܂��ˁB�@�O���b�v���悭�Ȃ����C������B�@����͂��̑��ɐ�����ɍs���i�v�̓J�[�u���s�����ǁj�Ƃ��p����ς���i����ŏƏ������j�Ƃ������Ƃ��ł���悤�ɂȂ����̂��킸���Ȑi���B
�t�L�l�v�Z�́A�������Ƃ��͈�؍s���Ă��炸float�Ōv�Z���Ă��܂����A20ms��5�X�e�b�v���x�̌v�Z���ł���悤�ł��B1�X�e�b�v4ms�ȉ����Ă��Ƃł��ˁB�@�����Coron�̏����\�͂��Ă��Ƃ����邯�ǁAUART�ʐM��S��DMA�Ɋۓ������Ă��邨�A�Ńn�[�h�̑҂����ԂƂ����̂������A���荞�݂ł��Ȃ��̂Ń��W�X�^�ޔ��Ȃǂ̃I�[�o�[�w�b�h���������A��������܂���B
�܂�A�����ƕ��G�Ȍv�Z�����A���^�C���ɍs����Ƃ������ƂȂ��ǂ悭�l�����3���R�x�̋r6�{���̋t�L�l�v�Z5�X�e�b�v���Ȃ̂ł��܂�]�T�������Ƃ�������B�@�i�p���ϊ������邩�����������ƌv�Z�ʑ������ǁj
�@
���������r���������ǁA�r�܂Ŏ肪���Ȃ��ȁB�i���ĂȂςȌ����j
���S���S����
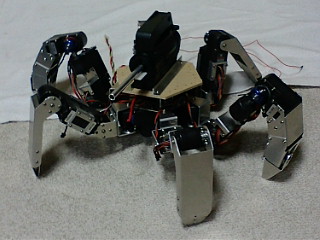
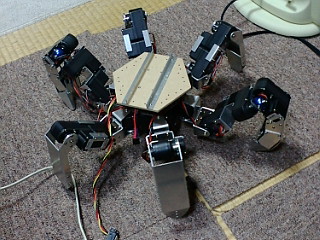
�}�C�R���ƁAWLAN�J�����Ɠd���K�����V�O�}�ɍڂ��Ė����R���g���[���ł���悤�ɂȂ�܂����B
�\��ʂ�ɑS�����ړ��ɐ���A����Ǝp�����ɐ���\�ł��B
WLAN�J�����Ř^�悵���A�V�O�}�ڐ��̉摜�ł��B�@ ���[��A�Ƃ̒����ʂ�������Ă�ȁ[�B�@�@���Ȃ݂ɋp�́}11deg�����������Ă��Ȃ��̂œ��B�ɂ͎g���܂���B(^_^;)
�}�C�R���A�d���{�[�h�A�J�����̖{�̂͂�������Œ肵���̂����ǁA���������Œ�̃��W���[��������B�@���ʃe�[�v�ŌŒ肵�Ă��邾�����Ɠ������Ă��邤���Ƀ|���|���O��Ă���B����ς肿���ƌŒ肵�Ȃ��ƃ_����(>_<)

ADC�Ɏ��|����Ȃ������̂ŁA�̐S�̔�e�Z���T�[���������B�@���T�ł��邩�ȁ[�B�@ADC�������Ȃ��ƃo�b�e���[�Ď����ł��Ȃ���ȁ[�B
���x�͐l�Ԗڐ��B�@���i��H��͕Еt���܂����B(^_^;)�@�J�[�y�b�g�̏ゾ���炢�����ǁA���������������Əނ��ꂿ�Ⴂ�܂����B�@�����Ȃ��烍�{�b�g�S�̂̎p����ς��ăJ�����y�яe�̏Ə���ς��Ă���̂��킩��ł��傤���B�@�J�[�u���s�́A���a���w�肵�ăJ�[�u����̂ł͂Ȃ��A���i���Ȃ�����Ă��܂��B�@�S�����ړ��ɑ��Ă�����ł���̂Ō��\���G�ȓ������ł��܂��B�@�����Ή��Ȃ���܂������i�ނ��Ă̂��ł��邩���B
���S���P�W����
�Ђ����Ԃ�̓����X�V�B�@�����̓��{�b�g���K������̂����ǁA�x�{���ߍ���ʼnƂł��낲�낵�Ă���܂����B
��T�́A����{�Z���ł́u���{�ŃT�o�Q�v�������̏o��������������Ă̎Q�������������A���j������d���łĂ�Ă������̈�T�Ԃ������̂œy���Ƃ��ǂ��z�Q�z�Q�`�Ɖ߂����Ă���܂����B
�u���{�ŃT�o�Q�v�́A��e�Z���T�[�܂łȂ�Ƃ������悤�ɂ��Ă������̂ł����A���e�����d���K���̐��i���瑝���ł��Ă��Ȃ������̂��v���I�ł����B�Q���@�̂ł͔�r�I�悭�����������Ǝv���̂����ǁAGONS����̓d���i�ł悩���������j��|�����Ƃ͏o���܂���ł����B�@���탍�{�x�[�X���Ƃ�����Ƌ��߂��ł��ˁ[�B
�������ɕ����@�̂������Ă���Ƃ���ł͖����̖�肪�������܂��āA�V�O�}�ł̓R���\�[���Ɏg���Ă���XBee�̒ʐM���s���ł����B���쑤�ł̎�M�͑��v���������ǁA���쑤����̑��M�͂Ȃ��Ȃ��Ă��炦�Ȃ���������܂����B�@�R�}���h���M�̓R���g���[���ň�{�����āA���̓J�����Ɏʂ�ʒu��LED�Ȃǂŕ\��������ĕ��@�i�C�K�A������Ă��j������XBee�͖�������͂��B�@�����A�����Ƃ����ǂ��������ł����B
�������Ԃɍ���Ȃ������H�암���̓r�j�e�ʼn��}���u���Ă������̂����ǁA�����������Ǝd�グ�āA�\�t�g������������Ǝd�グ�āA���e�����₵�āA���A���Ƃ���ς�c�e�Z���T�[�~�����ȁB
������A�V�O�}�ɂ͊J�������̖ڕW�ł��������H���j�̂��߂̐����g�ݍ��݂����ȁ[�B�@����Ă݂���A���\���j�͂��������Ă̂��킩���Ă��܂����̂����B�B�@���H���j�̍l�@������������ƃL�`���Ƃ���Ă݂邩�B
���S���Q�T����
�����Ԃ�ƑO����@ZMP���s�ŁA�����Ă݂������Ƃ��������̂����AColon�𗧂��グ����A�V�O�}��g�ݗ��Ă���A�d�����Z����������Ŏ����Ă��Ȃ��������Ƃ��������̂����A�s�ӂɂ������낤�Ǝv�������A���N�U��Ƀ����_�E�}�[�L�����[�������B

�V�O�}�̓���m�F���Ȃ����SEMB1200A���g���Ă��̂ŁA�g�ݗ��Ă���n�܂��āA�����_�̃v���O��������������ŁA�A�@�R���g���[���̑���Ƃ������グ�Ƃ��ǂ��������H�@���N��t��������������Y��Ă�B(^^�U
���s�͂����Ƃ��āA���[�V�����̊��t�Ƃ�����Ȃ��Ǝv���A���[�V�����ɖ��O�����ăL�[���t���w���v�R�}���h�Ō����悤�ɂ��Ȃ��Ƃ��߂��Ȃ��Ǝv�����B
�t���J�X�^�����Ƃ��������̂������ō��Ȃ��Ƃ����Ȃ�����߂�ǂ������B�@�܂��A��邽�тɂ�����ƕς��č�邩��O�ɍ�����̂��g���Ȃ������肵�āB�B
�����_�̃��[�V�����쐬�́A�����R���g���[���ŕҏW�ł���悤�ɂ��Ă��܂��B�@���̕����R���p�N�g�����AWindows�v���O�����͉����Ƃ߂�ǂ������B�@�������ɃR���g���[���Ń��[�V�������͓�����Ȃ��̂ł����̓R���\�[���ŁB
�t���b�V���̗̈�Ƀ��[�V������������̈悪����Ȃ������̂ŁA���̃��[�V������ǂݏo���āA���炵�ď������߂�悤�ɂ��āA���̂��Ƃɂ��炵�����[�V�����t�@�C����ǂݏo����悤�ɂ��āA�A�Ƃ����ӂ��ȍ�Ƃ��o�āA���[�V�����ɖ��O�����āA�w���v�R�}���h�ŃL�[���蓖�Ă�\���ł���悤�ɂ��܂����B
�ł��A�A�L�[���蓖�Ă��n�[�h�R�[�f�B���O�ɂȂ��ĂĕҏW�s�\�ɂȂ��Ă܂��B�@������ҏW�ł���悤�ɂ��Ȃ���ȁB
�Ƃ�����Ă邤���ɍ������I����Ă��܂��܂����B�@ZMP�Ŏ����������Ƃ͎��̋@��Ɏ����z���ł��B
���S���Q�X����
����̎d�����厸�s�ɏI��A��ςȂƂ��낪�X�ɕ~�����オ���Ă��܂��A�d���̃v���b�V���[�ɉ����Ԃ��ꂻ���ł��B
�����āA���R�̂��ƂȂ��獡�����d���������̂ł����A���Γ����̂��Ƃ������A���Ă������̂�����A���_��Ԃ����������̂�҂��ă����_�̑�������邱�ƂɁB
���[�V�����ɖ��O������Ƃ���܂ŏo�����̂ŁA���x�̓��[�V�����̊��蓖�Ă�ҏW�ł���悤�ɁA�A�ƌ����Ƃ��납�炾�����̂����A�@���āA�y��������܂����Ǝv�����Ƃ���A����H�H�����H�H�@�����o���Ă�B�B�B�B(^_^;)�@�@�ǂ����d���Ő����Ƃ��Ă���Ԃɏ��l�������R�[�f�B���O���Ă���Ă����悤�ł��B
���Ă����[�Ȃ��̂ŁA�ǂ������N�O�ɂ����ƃ��[�V�������蓖�Ă�ҏW�ł���悤�ɂ��Ă������݂����ł��B�@�o���ĂȂ���B�B(�[�[;)�@�@�i���ꏑ���Ȃ���i�X�v���o���Ă����B�B�j
�������������烂�[�V��������\���ł���悤�Ɋg�����č����̍�Ƃ͏I��B�@�S�R�i�܂Ȃ��ȁB
���T���P����
����̎��s�Ƃ͕ʌ��ŁA�q��Ń��r���[�B�@�M�����Ȃ����Ƃ��N����A���q���匃�{�I�I�@���ɝf�v����āA�ŏI�̐V�����ŋA�ꂸ�A���Ɉꔑ�B�@���A�ŗF�l�ƈ��݂ɍs�������ǁA�܂��܂���ςȏ�ԂȂ̂ɍX�ɉۑ肪�����邱�ƂɁB�@���̓D����Ԃ͂��܂ő����̂ł��傤���B
�@
���{�b�g�r���_�[��p�B��CASIO�@FX-150�����̂ŁA�����_�̕��s���B�e�B�@���[�����̕���܂���������Ă��Ȃ����Ƃ��킩��܂����B
�s�b�`���̓����N�r�ɂ��Ă��āA�Q���œ������Ă���̂ŁA�������������A�K�^�����Ȃ��̂����A���[�����̓V���O���Ȃ̂ŃK�^��������������܂����B���ׂɑ����l�p�����[�^���ǂ���������ł͂����Ȃ������悤���B
�����āA����ɑ����ăt���b�V���������[�ɃZ�[�u����f�[�^���g�債�āA��p�����[�^���_�u�������N�p�ƃV���O���p�̂��ꂼ���CW�ACCW�@���v4��ނɑ��₵�Ă݂��B
���葫�͌y�������̂����A���{�I�ȉ����ɂ͂Ȃ�Ȃ��炵���B�@�����x���ɂȂ�����A�x���r����ւ�����u�Ԃɕ��ׂ��y���Ȃ�A��l���s�v�ɂȂ�B�@���̃L�b�N�o�b�N�ŕ��s���s����ɂȂ�P�[�X����������B
���܂܂ł͑O�i���s�͂��葫�C���ŁA��i���s�͂�����Ƃ��葫�X�����y�������B�@��p�����[�^���āA�V���O�����ɑ�����傫��������A��i���s�̍ۂɃL�b�N�o�b�N���N����A�����Ă��܂��B�@������s����ɂȂ�B�@�Ȃ��Ȃ�����B�B
��͂�A�@�B�I�ɍ������グ��K�v������ȁB�@�����N�\���ɂ��ׂ��Ȃ̂̓s�b�`���ł͂Ȃ��āA���[�����Ȃ̂����B�@�i�����X�^�[�^�ɂ�������̂��ȁH�@�₾����(^^�U
���T���V����
�Q���͏o�A�R���͔������ɏo�����A�S���T���͕������ĉ点���Ă���܂����B�f�v���ĂȂ�ł������H�@���Ċ����ł���(^_^;)
���[�������_�u���ɂ���\�����������B�@���X�����@�̂ł��郉���_�E�}�[�L�����[�B�@�����@�̂炵���A�ł��邾�����̍\���̂܂܃��[�������_�u���ɂ������Ǝv���܂��B�@�ł��̂ł����������̂͏��m�̏�ŋ@�\�m�F�D����Ă��Ƃł������ƍ\���v���Ĕ��������Ă��܂��܂��傤�B
����Ōv�Z���s�̍Đ����x����������߂����̂Ȃ̂ł����B�B
���[�����V���O���̂܂܂ŕ��ו�����ł��܂������Ȃ��̂̓g���N�̂������A�K�^�t���̂������B�B�B�@���o�I�ł͂��邪�A�v�Z���s���s�����߂̊ߍĐ����x�̌�����͂�ł���̂͂���ς�K�^�t���̉e�����傫���悤�Ɋ����܂��B�@�I�t�Z�b�g�ƍl����������̂����ǁA�t�F�[�Y���ς��Ɠr�[�ɋɐ����ς��B�@�o�l�Ȃǂ��g���ăL�����Z�����悤�Ƃ���Ή���i�Ƃ�����������H�j�����܂�܂��B�@����A�o�l�����f�������Čv�Z�ɉ���������̂��ȁB
����܂Ă�B�g���N�s���̂����ŕ�ʂ��傫���Ȃ�A���וϓ��ł̕�ʕϓ��ɃT�[�{���ǐ��ł��Ȃ��ŃI�[�o�[�V���[�g���Ă��܂����Ă̂����̌��ۂɃ}�b�`���Ă���̂��ȁB�@����ƍ��̓g���N�s���̕����x�z�I�����B
������ɂ���_�u���ɂ���ǂ���̗v�f���������Ă��܂��̂Ő蕪���͂ł��Ȃ��ȁB
�������A�A�A�߂�S���_�u���ɂ���ƁA�����A�L�|�k���Z�b�g�ɂȂ����ؓ��\���Ɠ����ɂȂ��Ă��܂��B������Ə璷�߂����Ȃ�(>_<)
�Ȃɂ����Ă͂Ȃ����̂��B
���T���W����
�Ҋ߃��[�������_�u���ɁB�}�[�L�����[�̕��i���o������肻�̂܂g���悤�ɂ��܂����B�@�ł��AKRS-4014�������ĂȂ��݂����Ȃ̂ŁA4013�̃M�A�����ւ���4014�ɂ�����Ă��ƂŎ������Ă݂܂��B�@�����A�A���T�͎d�����R�ꂾ����Ȃ��B�@�ł���Ƃ�������K����̓��j�����B�B�@
���T���X����
�Ҋ߃��[���̃_�u�����Ɋւ��镔�i�͔��������ŁA���i�������܂ł�邱�Ƃ��Ȃ��Ȃ��Ă��܂����B�@�@���̓A�~�G����ɂ��肢�����̂����ǁA����ł�炵���č��T���͖����݂����B�@���K��ɂ͊Ԃɍ���Ȃ��̊m��ł��B
�ł͂��̊ԂɈႤ���ƁA�A�@���Ă̂��Ȃ��Ȃ��o���Ȃ��^�`�ŁA�ǂ��������̂��ȁB�@�����_�Ȃ���ƌ������Ƃő����Z���T�[�ɂ��Č������Ă݂邱�ƂɁB
�����̂S���Ɋ����Z���T�[�����āAZMP�𑪒肵�A���s�փt�B�[�h�o�b�N��������A�@�Ƃ����̂���肽���̂����A�����Z���T�[���ǂ����悤���B�@�j�b�^�̃t���L�V�t�H�[�X�{�^���Z���T�[���Ă̂��g���Ă݂����̂����ǁA�Б����łP���~�B�@�I�y�A���v��H�Ńh���C�u����K�v������̂ŗ����グ���ʓ|���������A�@���͂܂��A�i���O�f�[�^�͗v��Ȃ��Ȃ��Ǝv���Ă���̂ł���͌�����B�@�E�E�E������ăe�X�g��H�g��ł݂悤���ȁB
ZMP���s�ł̃Z���T�[�t�B�[�h�o�b�N���n�߂Ȃ̂ŁA�ȒP�ȃZ���T�[�f�[�^����n�߂����Ǝv���܂��B�@�t�B�[�h�o�b�N��@���A�ʏ�̃N���[�Y�h���[�v�ŁA�t�B�[�h�o�b�N���Ԃ��Z���Ƃ����̂ł͖����킯�����B
�Ƃ������ƂŁA����͑����̂S���ɃX�C�b�`�����āA���Ԏ��ŃX�C�b�`�̏�Ԃ��擾���邱�Ƃɂ��܂��B�@
8�r�b�g�f�[�^�Ȃ̂ŁAGPIO4�{�œǂݎ�邩�ADA�ϊ���H�i���_�[��H�j��g��ŃA�i���O1�|�[�g�œǂݎ�邩�BSEMB�ɂ̓A�i���O�|�[�g�����ĂȂ��̂ł���y�Ȃ̂�GPIO�����ǁA����̂��ƍl���ăA�i���O�Z���T�[�{�[�h�𓋍ڂ��悤���ȁB
���T���P�U����
����͗��K��B�@����̗��K��͕����a�m���Ƃ������Ƃœd�Ԃ�10���̂Ƃ���ł��B�@����ς�߂��Ɗy�ł��ˁ[�B
�A�~�G����ɂ��肢�����Ҋ߃��[�����̃_�u�������i�ł����A�A�~�G���Z�ʂ𗘂����Ă���ċ��j���Ɏ�邱�Ƃ��ł��܂����B�i���肪�Ƃ��������܂��B�A�~�G�a�@�N�{����@(^^�U�@�j
���j���͂ǂ���瑁���A�ꂻ���ȕ��͋C�������̂�7�����炢�ɂ͎d�����グ�ċA��B�@�����g�ݗ��Ă��J�n���܂����B�@�����o���Ƃ�����̂ŋ��j�����ɂ͑g�ݗ��Ă͊������܂���ł����B�@�y�j���̒������ƍĊJ�B�@�Q�������炢�ɂ���Ƒg�ݗ��Ă������B�@�z���Ƃ��\�t�g�̕ύX�͗��K����ł�邱�Ƃɂ��܂����B

�Ҋ߃��[�������_�u���ɂ��������_�}�[�L�����[�@���ԂƂ������Ƃ��͑O�̂܂܂Ȃ̂ŋt�L�l���Ȃǂ͂��̂܂g���܂��B�@�@�ς��Ƃ���́A���_�f�[�^���ς��̂ƁA���הz�����v���O�����ɑg�ݍ��܂Ȃ��Ƃ����Ȃ����ĕ����ł��B
���K����Ŕz�����āA�������Ă݂��Ƃ���A���_�f�[�^�ύX���Ȃ��ł����ʂɕ����܂����B�ł����A�lj������T�[�{�ɂ̓g���N�����Ă��Ȃ��̂ŁA�K�^�t���h�~�̃_���p�[�ɂȂ�������Ă܂��B�@�܂�A�_���p�[��g�ݍ��ނ��ƂŁi�g���N�̓��_�ɂȂ邯�ǁj�ꍇ�ɂ���Ă͓�����艻�̑�ɂȂ肻���Ƃ����ł��B
���j���͂��炾��Ɖ߂������̂Ŏ��_�f�[�^�̍X�V�����ł��Ȃ������B�@���T�ӂ肩�炿����Ƃ������Ԃ�����悤�ɂȂ�͂��Ȃ̂ŃE�B�[�N�f�[�̍�ƂɊ��ҁB
���T���R�O����
����`�A�@�Ҋ߃��[���_�u���̃C���v���B�@�ӊO�ɂ����̓��ł����B
�Ҋ߃��[�������_�u���ɂ������Ƃ��ǂ̂悤�Ƀv���O�����ɔ��f���邩�U�X�Y���A��Ԃ߂�ǂ��������Lj�ԃL�`���Ƃ��������������邱�Ƃɂ��܂����B�@�@�t�L�l�����ߗ�̍s��i���X�g�j���T�[�{���ɍ��킹�ĕύX���܂����B�@���̍ۂ�����Ƃ������ƂŁA���܂ŃT�[�{ID�Ƌt�L�l��̊ߔԍ�����v�����Ă����̂����ǁA�������ʂɊǗ�����悤�ɂ��܂����B
����ƁA�A�A��O�炵���G���[���o�ăv���O�����������Ȃ��Ȃ�܂����B(^^�U
�u�炵���v�@�Ƃ����̂́ASEMB�̃R���\�[����XBEE�łȂ����߂Ƀ{�[���[�g�������Ă��邽��EXCEPTION���b�Z�[�W�������������Ă��܂��ēǂ߂Ȃ��̂ł��B
�قڊԈႢ�Ȃ��T�[�{���𑝂₵�����Ƃɂ��ύX�������R�炵�Ă���̂��낤�Ǝv���ăf�o�b�O��i�߂Ă����̂����ǂ����ς蔻��܂���B�@�f�o�b�O�p�́APC�œ������v���O�������Ƃ����Ɠ����o�����̂Ŏc��̓������[�A���P�[�V�����Ȃǂ̃V�X�e���֘A�̖�肩�H�@�ƁA�v���Ă݂����A�������ϐ����A�N�Z�X���Ă���O���N�������肵�Ȃ��B
���������̂��ďW���I�ɂ��Ȃ��ƂȂ��Ȃ��i�܂Ȃ��̂����ǁA���d�����Z�����Ă��̃f�o�b�O�ɏW���ł��Ȃ��B�@���̓y���ɏW�����ăf�o�b�O���Ă��܂����I�ƈӋC����ŋ��j���ɋA���Ă�����A�A�Ȃ��PC�̋��������������Ȃ�͂��߂܂����B
�����ɃA�N�Z�X����ƁA�l������ŕԂ��Ă��Ȃ��B�@�@���߂̓��A���v���C���[���N�������Ƃ������������̂ɂƂ��Ƃ��}�C�h�L�������g�t�H���_�[���J�������Ōł܂��Ă��܂��悤�ɂȂ�܂����B
�������Ȃ��A���낻��PC�����ւ������ȁH�@�Ƃ��l���Ă������A�ăC���X�g�[����PC�̔����ւ������\�z���l����Ƃ�肽���Ȃ��B�@�Ƃ肠�����`�F�b�N�f�B�X�N�������ėl�q�����邱�ƂɁB�@�@�`�F�b�N�f�B�X�N���X�^�[�g�����̂��y�j���̂�����20�����炢�ŁA�I������̂����j����18�����炢�ł����B�@�F�X���b�Z�[�W���o���Ă����̂ŁA�Ȃ��̂��N�����Ă����炵���ł��B�ŁA�Ȃ�Ƃ����APC�͎g���Ă���悤�Ȃ̂łЂƂ܂��͒������̂��ȁH�@��Ȃ������B�B�@�Ĕ����˂悢���B
�����āA�f�o�b�O�ĊJ�B
PC�ł͂����Ɠ����̂�SEMB�ł͓����Ȃ��B�@SEMB�œ������ƕ�l���Ƃ�ł��Ȃ��f�J�C���l�ɂȂ��Ă��܂��悤���B�@�i�������[�̕s���A�N�Z�X�ł͂Ȃ��炵���B�j�@������w�����ő傫���Ȃ��Ă��܂��A�Ō�ɂ�NaN�ɂȂ��Ă��܂��Ă���炵���B
�\�[�X�߂Ă��������ȂƂ���͌�����Ȃ��̂ŁA�������Ȓl�ɂȂ�͂��߂�̂͂ǂ��Ȃ̂��A�A����ǂ��Ēl�����j�^�[���Ă����ƁA�A�ߕ��v�Z�́A�x���r�̌v�Z�����ł��������Ȃ�炵�����Ƃ�˂��~�߂��B
�������W���I�ɐȂ����ƁA���_���W�̕ϐ����ݒ肳�ꂸ�Ƀ��[�v���n�܂镔�����������B�@�ł��A���ꂪ�ݒ肳��Ȃ��Ă��w�����I�ɑ傫���Ȃ����肵�Ȃ���Ȃ��`�B�@�Ǝv���A�����Ɛݒ肷��ƁA�����Ɠ����o���܂����B
���̕ϐ��A���[�J���ϐ��Ȃ̂ł����A���ݒ肾�ƒl�͕s��ł��B�@�ł��A���܂܂ł��ݒ肳��ĂȂ��Ă��������ȓ���͂��Ă��Ȃ������̂ɁA�ߊp�x��̃T�C�Y��ύX�������ƂŃ������[�A���P�[�V�������ς�����̂��A�w�����I�ɑ傫�Ȓl�����悤�ɂȂ����悤�ł��B�@�R���p�C���ɂ��Ă͂悭�m��Ȃ��̂ł����A���[�J���ϐ�������Ƃ����Đ錾���ꂽ�Ƃ���Ń������[���m�ۂ����̂ł͂Ȃ��A���炩���߃A�T�C������Ă���̂�������Ȃ��Ǝv���Ă����̂ł����A�����Ɛ錾����邽�тɃA�T�C�������悤�ł��B
�����Ɠ�������ƌ����ăo�O�������킯����Ȃ��̂͗������Ă������Ȃ��ǁA�ύX�����Ƃ���ƊW�Ȃ��Ƃ���Ńo�O�����݉�����ƌ���������̂ɋ�J���܂��B���삩�炨�����ȏꏊ��ސ����悤�Ƃ���̂����Əꍇ�ɂ��悤�ł��B
����ȊO�ɂ����\��������o�O�������ďC�����܂����B���܂ɂ͊��������Ǝv�����v���O���������߂Ă݂�K�v������݂����ł��B
���Ȃ݂ɁA���܂�Ƃ���������Ă������Ȃ��Ă����s�̗l�q�ɕω��͂���܂���B�@�߂��V���O���̎��͌��邩��ɕ���K�v�Ȋ������������ǃ_�u���ɂ������Ƃ̊ߕ��גl���������͌Ҋ߃��[���ɂ͕�͂قƂ�ǕK�v�ł͂Ȃ��悤�ł��B�@�������Č��������ł��V�r���~�ʂ�`���ē����@�i���ۂɂ͎x���r�̌Ҋ߂��d�ɕ����Ă����̂����ǁj�@�̂͂Ȃ��Ȃ�܂����B
����Ɩ{��̍�Ƃɐi�߂����ł��B�@��ꂽ�`(�[�[;)
���T���R�P����
����ƕ��s�e�X�g�B
�܂��̓g���������B�@�_�u���̒��ߑ�͍l�����A���ꂼ��̃T�[�{���j���[�g�����ʒu�Ńg�����������܂����B
MDF�{�[�h��ŕ������Ă݂�ƁA���܂܂ł��̓X���b�v������܂����B�@�����X���ł��B�@����Ȃ�����Ԃ�ƘH�ʂ�I���ɕ�����悤�ɂȂ�����������܂���B
�Ƃ������ƂŃJ�[�y�b�g�̏��������Ă݂܂����B
�J�[�y�b�g�̖ڂ̕����ɂ���Ă͂����Ă��܂��̂ŁA���S���e�ł͂Ȃ��ł����A���܂܂ł͂����ς�����Ȃ������J�[�y�b�g���܂����������Ă邩���i���ł��傤�B
���̓{�[�h�̏ゾ�Ƃ܂����������Ȃ���ł����ǂˁB�@����������ƐF�X�����Ă݂܂��B
���U���Q����
�J�[�y�b�g�̏�ł̕��s�͌��\�Ȋm���Ŏ��s���܂��B�@�X�ɂ́A�{�[�h�̏�ł̕��s���ƁA�߂��d���Ȃ�������p�Ƃ��Ē��˂Ă��܂��悤�ɂȂ�܂����B
���˂������ʼnd�̈ړ������肹���A�܂������ɕ����Ȃ������ɂȂ��Ă���悤�ł��B�@�J�[�y�b�g�̏ゾ�ƁA�J�[�y�b�g���Ռ����z�����鎖�ɂȂ�A���ʓI�ɉd�̈ړ������肵�Ă܂�����������̂ł͂Ȃ����Ǝv���܂��B
�����ŁA�����ɏՌ��z���Q���V�[�g��\��t���Ă݂邱�Ƃɂ��܂����B�@�ڒn�̓Q���V�[�g�Ƃ����킯�ɂ͂����Ȃ��̂ŃA���~�v���[�g�ł��B
 �@�@
�@�@
���ʂ́A�{�[�h��ł��܂������ɕ�����悤�ɂȂ�܂����B�@�����������傫���Ȃ��Ă��܂����̂Ő���̎��Ɏx���r�ƗV�r���Ԃ����Ă��܂����߁A�r�������������傫������K�v������܂����B
����ŃJ�[�y�b�g��ł̕��s�������ƈ��肷��悤�ɂȂ�܂����B�@�Ȃ�����ނ����͂܂����Ă��܂��A���ɓ]��ł��܂��܂����B
�@
�{�[�h��̕��s�̍ہA�܂������X���b�v���Ă��܂��B�������O���b�v������Ƌ��炭�͂����ƕ����Ȃ��悤�ȋC�����܂��B�@�܂��܂��Đ����x���Ⴂ�̂��Ƃ��v���܂����A�ǂ��������Čv�Z�ǂ���ɂ͓����Ȃ����낤���A���̂��߂ɐڒn�Ռ��Ƃ����͕̂K����������ł��傤�B�@���̐ڒn�Ռ����X���b�v�œ������Ă�邱�Ƃŕ����Ă���Ǝv���܂��B
�Ȃ�A�O���b�v���s�ɂ���ɂ͐ڒn�Ռ����X���b�v�ȊO�œ������Ă��@�\����������K�v������Ƃ������ƂɂȂ�܂��B�@����̃Q���V�[�g�����̈�Ă������̂ł����A�܂�����Ȃ��悤�ł��B
�@
���Ď��͑����Z���T�[���B�@����ƃt�B�[�h�o�b�N�n�ɓ��ꂻ���ł��B
���U���R����
�S���ɃX�C�b�`��z�u���������쐻�B�@���̃X�C�b�`�̏�ɃA���~�v���[�g��\��t����B
 �@�@
�@�@
�X�C�b�`�͉����͂��������ăX�g���[�N�����������̂�T��������Ȃ̂����A���炭�͑ϋv�͂������̂ł�����ꂿ�Ⴄ��Ȃ����Ǝv����B
�V���~�b�g�g���K�[����āAGPIO�œǂݎ��������ȁ[���x�ɍl���Ă���B�@�ǂݎ��������T�[�{�̐�������Ɠ���25ms�ɂȂ��Ă��܂��̂��c�O�B
�E�E�E�@�Ă��A�܂��͂��̑��ł܂Ƃ��ɕ����邩�ǂ��������B�@���Ȃ��Ƃ͂����X�g���[�N������̂ŁA�d���������r�[�ɗǂ��Ȃ����Ƃ��N���肻���ȗ\��������B
���U���U����
�����Z���T�[��g�ݗ��Ăĕ������Ă݂��Ƃ���A�����ł��B�X�C�b�`�̃X�g���[�N���N�b�V�����̖����ɂȂ�̂��A�o�X�^�u�\�[���̎��������������ł��B�@�������A�����̌Œ肪�Â��̂ŁA�����̑��Ⴄ�Ƒ������O��Ă��܂��܂��B
�����Ŏ��̒i�K�Ƃ��āA�����Z���T�[�̉�H�g�݁B
�f�R�[�_�[�ŃX�C�b�`��I��ŁA�X�C�b�`�̊J��ǂݎ��܂��B��ւ��Ă���ǂݎ��̂Ń`���^�����O�h�~��H�����ɗ����Ȃ��̂ŁA�o�b�t�@�̂���ŃC���o�[�^�������邾���œǂݎ��܂��B

�܂��͕Б������������ăe�X�g�B�B�@���ނށB�@�d���������肫��Ȃ��B�@�t���h�~�p�̃_�C�I�[�h���X�C�b�`�ɂ��Ă�LED�ő�p�����̂��_�����BLED���ĕ��ʂ̃_�C�I�[�h�̑���ɂ͂Ȃ�Ȃ����ˁB
�����͌���B�@���T�͎d�����R��Ȃ̂Ń��{��Ƃ��ł��邩�ǂ����s���B�@���K����s���邩�ǂ����������B�@���łɂ�ف[�o����B(>_<)
���U���P�Q����
����Ƒ����Z���T�[���ł��܂����B�@GPIO��ߖ邽�߂ɁA�f�R�[�_�[�ŃX�L��������悤�ɂ��܂����B�@�茳�ɂ�����2�r�b�g�f�R�[�_�[74HC139���g�����̂ł����A���_���ŃL�[�}�g���N�X���đg�߂Ȃ���ł��ˁB�@�ł������ȋC��������ǂȁB�@���߂ăC���o�[�^����Đ��_���ɂ��܂����B

�܂�SEMB���̔z�����o���Ă��Ȃ��̂Ŋ������Ă��Ȃ��̂����ǁA����͂������Ă��܂����B�@
�@���邪����Ċ��������āA�����̗��K��ɍs���B
�A����������SEMB����z�����āA�������Ă�����K��ɍs���B
�B���߂ă����_�������ė��K��ɍs���B
�C���K��ɍs���̂���߂āA�������Ɩ����z���ƃv���O������g�ށB
�@�͂����������ȋC������B�@�A�́A���LJC�ɂȂ����Ⴄ�悤�ȋC������B�@�B�Ȃ�V�O�}�����Ă����̂��ȁH
�������N�����ćA�Ŋ撣�邩�`�B
���U���P�T����
���K��͇A�Ŋ撣���āA�z�������I��点�Ă���}���ŏ����B�@�����_�ƃV�O�}��ς�ŎԂōs�������Ƃ��v���܂������A�����̎Ԃɂ̓i�r���Ȃ��̂ʼn����ׂ����ɂ͖ړI�n�ɓ����������ɂȂ��̂Ŏ���߁B�@�����_�����ו��ɋl�߂ďo�����܂����B
�H�t���Ŕ������������������̂ŁA����J���̓�����t�߂̃R�C�����b�J�[�ɉו���a���Ĕ������B�@�Ƃ��낪�A�ړI�̂��X�������x�݂ŁA�������Ǝv���Ă������i�͂قƂ�ǔ����܂���ł����B�@��������B�B�B
���K���ɍs���ƁA���̂������l�����x�B�@�܁A�^�ɉᒠ�����Ă邹���������ł����ǂˁB�@���r�����Ă���̂��݂���A�V�O�}�����Ă�������ȁ[�Ə����v������B
�ł��A�����Z���T�[����ɕ��s�̃t�B�[�h�o�b�N����ɂ��ċg�c����A�C�K�A����A���܂̂�ƋZ�p�n�k�`�B�@�F�X�ƎQ�l�ɂȂ�܂����B�@�������ĂȂ��̂Ŕ������炢�������Ă��܂��������B(^^�U
�z�����I��点�����肾���������Z���T�[�́A�d���d�����ԈႦ��3.3V��z�����Ă��܂����炵���ASEMB���瓮����m�F���邱�Ƃ��ł��܂���ł����B�@����������Ɣz�����C�����܂����B�@�����Z���T�[�ő����̓������m�F�������Ƃ��낾���ǃv���O��������ē�������̂͂���������ɂȂ肻���ł��B�@������Ǝ��Ԃ����Ȃ��āB�B
�@
�����Z���T�[�����t������ԂŁA���K���ŕ������Č����Ƃ���A�Ȃ��Ƃœ����������������˂܂��B�@�����ɕ���͂����Ă݂��璵�˂����܂�܂����B�@�Ȃ��ȁ[�B
���U���Q�O����
�p�\�R�������o�C��Ԃł��B
�Ȃ̃A�b�v�f�[�g�Ɏ��s�����̂����������ɂ܂����������Ȃ��Ă��܂����B�@�����グ�āA�܂Ƃ��Ɏg����悤�ɂȂ�܂ł�30���ȏォ����B�B�B
����ȂȂ̂ŁA�Ȃ��e���V�������S�R�オ��Ȃ��B�@�ăC���X�g�[���Ƃ����Ώ����͉��P�������Ȋ��������ǁA�������낻����č��Ȃ̂ŐV����PC�����ƂɁB
���{�b�g�J�������O��PC����ɂ��ڂ��������̂����ǁA�ŋ߂�PC����ɂ͂����ς�a���Ăǂ��PC���������̂������ς�킩���B�@�����^�эl���ď����߂�PC�ɂ��悤���Ǝv�������ǁA�����Ȃ�Ƃ���܂�p���[���Ȃ������ȍ\�������Ȃ�����ɍ����Ȃ����Ⴄ�B
���ǁA�Y���ɍ��̂Ɠ������炢�̃T�C�Y��PC�ɂȂ�܂����B�@�͂�������ݒ�����Ȃ�����Ȃ�Ȃ���ȁB�@���ꂪ�܂��߂�ǂ������ă��Ȃ�B
�@
���{�b�g����i�W�Ȃ��ł��B(�[�[;)
���U���Q�V����
�d�����S�R�q�}�ɂȂ�܂���B
��T���C�x���g���肾������ȏ�A�}�b�`�|���v�I�Ȏd���ő呛���ɂȂ�A�y�j���̂Q�R������H�ꂩ��A���ė���܂����B�@�����č��T���C�x���g��������ł��B(�[�[;)
���̐�̗\��������Ȃ��̂ō���̂�ف[��������ł��B�@�v�����N�̂�ف[�Ƀ����_�ŏo�ꂵ�A�����̌v�Z���s(^_^;)���ւ�ւ낾�����̂����������Ń}�[�L�����[�r�ɂ�����ZMP�O�͂̌v�Z���s�v���O������������肵���̂������B
�d�����Z�����Ƃ����Ƃ������Ă邪�A���N��11������}�[�L�����[�r�ł̌v�Z���s���o�����i�K�ŁA�J������ς�ʼn摜�����Ƃ̘A�g�ɒ��肵�Ă����A�����Ń_�b�V��2000�̃��x���W���炢�͏o�����̂��낤�B�@�R�����Ɏ���o���ăV�O�}�������Ƃ��Ȃ������炢�܂���́B�B�@�Ȃ�Č������肵�Ă��A���̂Ƃ��Ƀ��`�x�[�V����������������d���Ȃ������ˁB
�R�����������Ă�������[�������_�u���ɂ�����A�����Z���T�[������肵�Ă����B�@�����Ń_�b�V��2000�����C���X�g���[�g���Ƃ�����e���ɂ��ꂷ�����ȁB(^^�U
�@
�����Z���T�[�̃f�[�^�o�b�t�@�̑g�ݍ��݁B�@�����Z���T�[�̃f�[�^��8�r�b�g�f�[�^�B�@�������Ƀ��X�g�ɂ����疳�ʂɃf�[�^���ł����Ȃ邾���Ȃ̂Ń����O�o�b�t�@�ɂ��܂����B�@���ナ���O�o�b�t�@���g�����ǂ����͂킩��ǁA�F��ȃt���[���T�C�Y�̃f�[�^�������郊���O�o�b�t�@�N���X��������肵�Ă܂����B�@C++�Ȃ�e���u���[�g�@�\�����邩�炻����Ƃ��͊ȒP�Ȃ̂����B�@����ȑO��STL�����邩�烊�X�g�Ȃ��錾���邾���Ŏg����B�@C++�g�������Ȃ��B
 �@�I�V������L�т�V���R���`���[�u2�{�B�@�J�e�[�e���ł͂���܂���B�@�ŏI�I�ɂ͑��̃t���[�����ɑg�ݍ��ޗ\��B
�@�I�V������L�т�V���R���`���[�u2�{�B�@�J�e�[�e���ł͂���܂���B�@�ŏI�I�ɂ͑��̃t���[�����ɑg�ݍ��ޗ\��B
���U���Q�W����
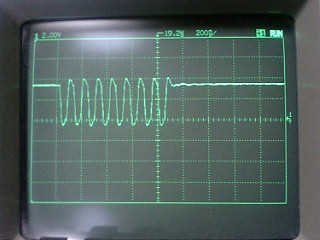
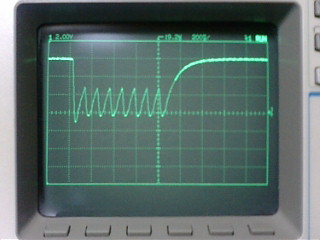
1ms�P�ʂ̃f�[�^����肽�������ł����A���܂������Ȃ������̂ł܂���20ms�P�ʂ̃f�[�^�B
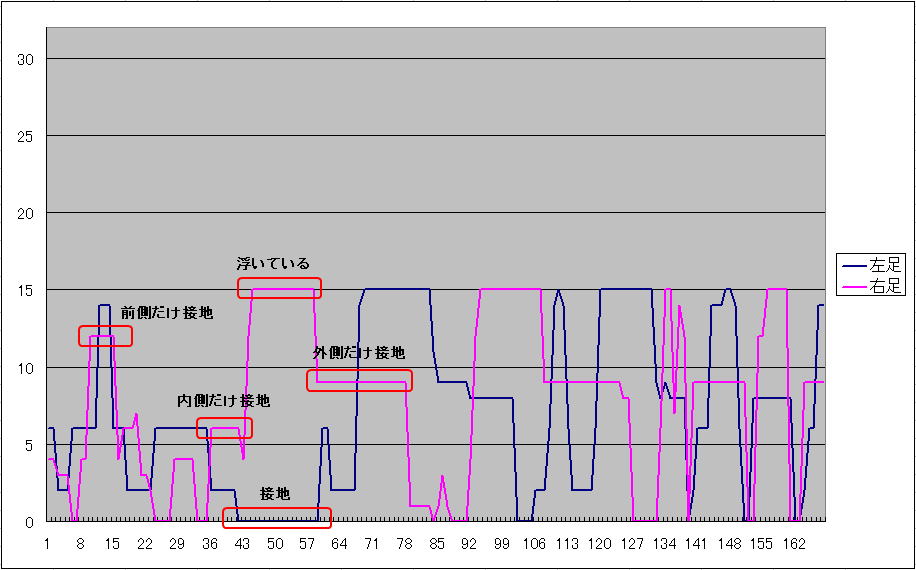
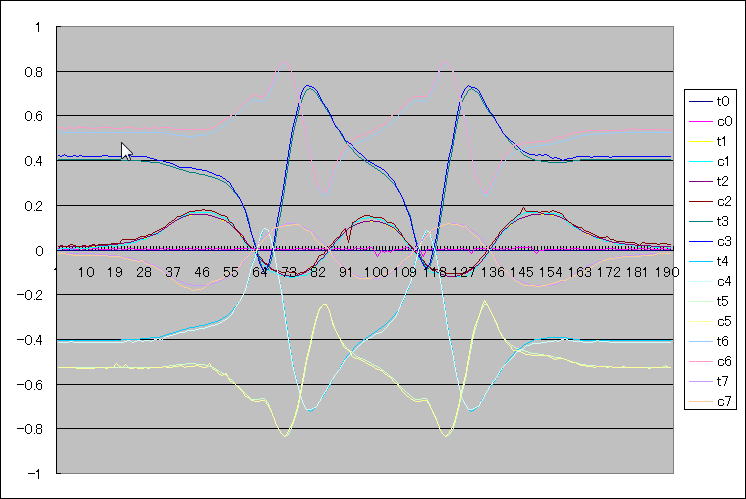
�O���t��15�Ƃ����̂����S�ɑ��������Ă����Ԃ������܂��B�@����ȊO�͑����̂ǂ�������̃Z���T�[��ON�ɂȂ��Ă���Ƃ������ƁB
���߂�1���ȊO�͐ڒn�i0)�̎��Ԃ��قƂ�ǂȂ��̂ŁA�ǂ��炩�ɌX���Ă����ł��ˁB
�E���̏��߂�1����ǂ������Ă݂�ƁA�܂��A���������ڒn(6)��ԂƂȂ�A���ꂩ�犮�S�ɑ�������(0)�B�@�O������ڒn(9)���āA�ڒn�ɓ���̂����ǁA�����o�E���h���Ă܂��ˁB
�Ō��1������������ė����������Ă���͍��E�ɂ��炮��h��Ă���l�q���킩��܂��B�i�킩��ȁB(^^�U�@�j�@���グ�^�C�~���O�̗��z�l���ꏏ�ɕ`���Ȃ���킩���ł��ˁB
�O�̂߂�(12�j��A��̂߂�(3)���]�薳���̂őO��̃o�����X�͗ǂ��݂����B�@���E�ɐU�ꂿ����Ă�悤�ł��B
���Ċ����̕��͂��v���O�����ł���Ȃ���Ȃ�Ȃ��킯�����ǁA���\�^�t�ł��ȁ[����́B�B�@�v�Z��A�ڒn���Ă��Ȃ���Ȃ�Ȃ��^�C�~���O�łǂ���ɌX���Ă��邩�ʂ���悢�̂��ȁB
���V���R����
�����̂܂܂��Ə�Ԃ��킩��Ȃ��̂ŁA�o�͕��@��ς��Ă݂��B
�X�C�b�`��ONOFF��Ԃ�O������ƍ��E������ZMP�̃Y���ɒu�������ĕ\�����Ă݂܂����B�@�Ԋۂ�ON�̃Z���T�[�ł��B�@�����ۂ�ZMP�Ƃ͈قȂ�̂Œ��ӁB
���E�́{�������{�b�g�̊O���ɂȂ�܂��B�@�܂�A���̐}�͉E���̏ꍇ�������B�@�����͍��E�����]���܂��B
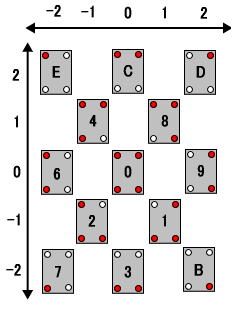
�������S�ɕ����Ă���Ƃ��͑O�㍶�E�Ƃ��i�R�C�R�j�Ƃ����l����邱�ƂƂ��܂����B�@�܂��AA�Ƃ�5�Ƃ��̊�{�I�ɂ͂��肦�Ȃ���Ԃ̑g�ݍ��킹��0�Ƃ��ď������܂��B
�܂��AMDF�{�[�h��i�X���b�v���₷�����j�ł̃f�[�^�@���@�@����̃f�[�^�ƈ���āA�������߂ł������ȐU���������悤�ɂ��܂����B�@�㑤���E���A�����������ł��B
�����āA�@�J�[�y�b�g���i�X���b�v���ɂ����j�ł̃f�[�^�B
��͂�A�X���b�v���L��ق����Ռ���������悤�ŁAMDF�{�[�h��̕��s�f�[�^�̕����R�R�����`���ƂȂ����ł��B
�ǂ���ɂ��Ă����������S�ɐڒn���Ă��鎞�Ԃ��ĂقƂ�ǂȂ��ł��˂��B�@���̃K�`�������f�[�^�Ńp�����[�^�C���̕������f����̂͂Ȃ��Ȃ�����ł��B
���V���S����
ZMP�̒���������Α����Z���T�[�̎擾�f�[�^���ω�����̂����m�F���邽�߂ɐF�X�����B
���̉^�т��ɂ��āA�ڕWZMP������ω�������̂͂�����ƍ�荞�݂��K�v�Ȃ̂ŁA�܂��̓X�^���X��ς��ăZ���T�[�f�[�^�̌��ʂ��ω����邩�ǂ������m�F�����̂����A�����ς�ω����Ȃ��B�@���ꂶ��t�B�[�h�o�b�N�������Ȃ���Ȃ��B
����A������Ƃ����O���ڒn���Ԃ��Z���Ȃ��Ă邩�H�@�������ɂ��ω����Ȃ��Ȃ��B�@�ǂ����MDF�{�[�h��ł̕��s�ł��B
��������A�z���g�ɊO������ڒn���Ă���̂��ǂ������X���[�B�e�Ŋm�F����ƁA�A�ӂށA�m���ɊO����ڒn���Ă�����ۂ��ȁB�@�Ƃ������A�E���V�r���͍����ɏd�S���ڂ肫���Ă��Ȃ��悤�Ɍ�����B�@�����������Ă��Ƃ��[�B�@�V�r���O������ڒn����ꍇ�͎x���r�̖ڕWZMP�������O���ɂ���A�@�ł����̂��ȁ[�B
�X���[�ŎB���Ă݂āA����ς�Ҋ߃��[���̍Đ����x�ɂ܂������������̂ōĐ����x�̃`�F�b�N�B
�E���̌Ҋ߃��[�����B�@�x���r�ɂȂ��Ă鎞�ɃI�[�o�[�V���[�g���Ă܂��B�@����ς������ĂȂ��Ȃ��B
�@
����Ȃ���ȂŐF�X�͍����Ă����̂����ǁA�ǂ����T�[�{�ʐM�ɂ��f�[�^�擾���m�C�W�[�B�@��̃O���t���G���[�f�[�^�����Ă����ԁB
�ŁASEMB1200A�̃I�v�V�����{�[�h�ł��郌�x���ϊ�����g���ƁA�����قǃG���[�������B�@�������[�A�G���[���������͉̂��̔z��������̂����Ȃ̂ˁB�@�p�X�R�������ς�����Ă݂悤�B(^^�U
�߂̍Đ����x���܂��܂���̗]�n������Ƃ������ƂŁA�ߊp�x��ZMP���v�Z���Ă݂āA�����Z���T�[�̌��ʂƏƍ����Ă݂悤���Ǝv�����̂����ǁA����͂�����ƈႤ�ȂƁB
�����_���f�������ZMP�v�Z�͑����������Ɛڒn���Ă��邱�Ƃ�O��Ƃ��Ă���̂ŁA�������ǂ������畂���Ă��鍡�̏�Ԃł͊ߊp�x����͐������v�Z�͓��o�ł��Ȃ��B�@
�����Z���T�[�̌��ʂ��璼�ڃt�B�[�h�o�b�N����̂ł͂Ȃ��A�܂��͑�����������Ɛڒn����悤�ɂ���B�@���̌�ZMP�Ƀt�B�[�h�o�b�N���Ă������Ċ������Ȃ��B
���V���P�P����
�����͂�ف[�̓��B
�������A�d���ʼn����Ă��܂��A�y���Ƃ��o�B�@�d�����I��������ƁA�ł��グ�����ł��Q�����悤�Ǝv���ĎQ�����Ă���͂��̐l�X�ɕЂ��[����d�b�����̂����A������Ȃ���Ȃ��B�@����Ƃ����킳��Ɠd�b���Ȃ������̂����A���ꂩ��ł��グ���Ɍ������Ă��Ԃɍ���Ȃ������������̂ŁA�ł��グ�Q����������߂܂����B�@�ƂقفB�B�B
�o��ł���ł��Ȃ��̃��x������Ȃ��Ղ�ɎQ���ł����B�B
�@
�������Ă���PC���͂����B�@�������ĂQ�T�ԁB�@�t���f���𒍕������̂����A�͂������ɂ͉ă��f���������ɂȂ��Ă��B(�[�[;)
�d��������ȂȂ̂ŁA�͂���PC�̃Z�b�e�B���O���܂܂Ȃ�Ȃ���Ԃł��B�@�����HP�̍X�V���ł���悤���r���_�[�̃C���X�g�[�����������܂����B
�v���O�����s����ɂ�Cygwin����ăN���X�����\�z���˂Ȃ�Ȃ��B�@�O��A�K�v�ȃc�[���̌��ɂ߂��T�{����Cygwin���t���C���X�g�[�������̂����A����͂��ЂƂ��K�v�ȃp�b�P�[�W�����C���X�g�[���������B�B�B�B�@�@�@�@���ǁA�t�����ꂿ����������F�X�������Ȃ��B
���V���P�V����
��������T��X�V�ɂȂ��Ă��܂����B
�d������A���ăR�c�R�c��SEMB1200A�̃N���X�����\�z�i�ƌ����Ă�make���邾���ł����ǁj���Ă��܂����B
��قǂ����SEMB�p���C�u�����̃C���X�g�[�����I����āA�����_�̃v���O�������R���p�C�����Ă݂܂����B�@�ꉞ�����Ă���݂��������ǁA�����R���g���[�����t���Ȃ��B�@CSI�̊����ς�����̂��ȁH
�ł��A�����͂����܂ŁB�@�����͂܂��o�ł��B�@������Ƃ��S�R�x��łȂ��Ȃ��B
���V���P�W����
��Ђ���̋A�蓹�ŃJ�u�g���V��ߊl�B

�ЂƂ������������A�������Ă��܂����B
��������������}���V�����̒ʘH�ɂ����S�L�u��3�C�ގ����܂����B�@���������Ȃ̂Ɉ������Ⴂ�߂���B�B�B�B(^_^;)
�@
�����͋v���Ԃ�̋x�݂ł��B�@�Ăяo����������Ȃ���A�A�A�ł����ǁB
���V���Q�O����
���j�����j���͋x�߂��̂ŁACSI�̕s����T�[�{�̃L���v�`���[�̓ǂݎ��G���[���������Ă���܂����B�@���j���̓��{�ŃT�o�Q�̓��������̂����ǁA�Ƃ���o���Ȃ������Ȃ��`(^_^;)
�܂��ACSI�͂Ȃ��킩��������������̂��������悤�ŁACoron�œǂݎ�����t�H�[�}�b�g�Ɠ����ɂȂ��Ă��܂����BSISO����̃u���O�ɂ��������ƈ�v�����̂ŁA���܂ł��������������炵���B�^�C�~���O�̖�肩�ȁH
�����ăL���v�`���[�G���[�̕������ASEMB�̃I�v�V�����{�[�h�Ȃ�G���[���قƂ�ǂȂ����Ă��ƂŁA�����Ŕz�������o�X�X�C�b�`�����ɖ�肪����炵���B�@�������x���ϊ��@�\�t���̃o�X�X�C�b�`�����܂��Ă��邾���Ȃ̂ŁA�m�C�Y���ȁH���Ă��ƂŁA�d�����������Ƀp�X�R����lj��B�@A�d���EB�d��������̂őo���ɒlj��B
���łɃR�l�N�^��1.25mm�s�b�`�̃��m�Ɍ������A�핢���n�����Ⴄ�A�[�X���C�������܂����B�@���܂܂ł̓n�[�t�s�b�`�̃��j�o�[�T�����1.5mm�s�b�`�̃R�l�N�^�������t���Ă����̂����A1.25mm�s�b�`�̃R�l�N�^���������̂Ł�(~_~)
�z�������ꂢ�ɂȂ����̂ŁA�u����ŃG���[�t���[�����`�v�Ǝ��M���X�ŃL���v�`���[�����Ƃ���A���O�Ƃ܂������ς��Ȃ��B�@��������B
�@
�����A��Ђɍs���ē����ɘb�����Ƃ���A���[�h���̃v���A�b�v��R���������ł��ˁ[�ALOW�ɉ����肫���ĂȂ���Ȃ��ł����H�@���Ă��ƂȂ̂ŃI�V���Ō��Ă݂邱�ƂɁB
�������ASEMB1200A����̃R�}���h�ŁA�E�����T�[�{����̉����B�����肫���ĂȂ����ǁA0.5V���Ă邩����v�Ȃ̂ł́H�Ǝv����SEMB�̃I�v�V�����{�[�h�œ����悤�Ɍ��Ă݂�ƁB
���ꂢ�ɂق�0V�܂ʼn������Ă�B���ꂩ���`�BSEMB�̃I�v�V�����{�[�h�̓��[�h���Ƀv���A�b�v��R���Ȃ�����Ȃ�ł��Ȃ��Ǝv���Ă����̂ł����A�T�[�{���Ƀv���A�b�v��R������̂��ȁH�����v���A�b�v���Ă���Ȃ�p���łȂ���LOW�Ɉ����������͌����Ă��܂��܂��ˁB��R�l���ł����̂��ȁH
���Ȃ݂ɉ����肫��Ȃ��̂����ׂ̂������Ƃ������ƂŃT�[�{3�������Ƃ����1�ɂ��Ă݂Ă������肫��Ȃ����Ƃɂ͕ς��܂���ł����B
�R�}���h���ł͂�����LOW�ɉ������Ă���̂ň������肫��Ă��Ȃ��̂̓T�[�{�̃h���C�u�\�͂̂��߂��B�o�X�t�@�C�g�ʼn���̂�����邽�߂ɃI�[�v���ɂ��āA�p���ڑ����l���Ăł�����R�ł��Ă���Ƃ���ƁA�A�����瑤�̃v���A�b�v��R�͗v��Ȃ��ł��ˁB
���[�h���̃v���A�b�v��R������Ⴄ���B�B�B�B�B�B�@�߂�ǂ������Ȃ��`(�[�[;)
���V���Q�P����
�o�������r�I�����A�ꂽ�̂����ǁA��t����ł��̂Ő��������߂Ă����ƊJ�n�B
���[�h���̃v���A�b�v��R�����܂����B�@�o�X�X�C�b�`��IC��SSOP�Ȃ̂ō�Ƃ͓�q���ɂ߂��̂����ǂȂ�Ƃ������B�@�e�X�g�Ȃ̂łW������邤����1������������R���폜���܂����B
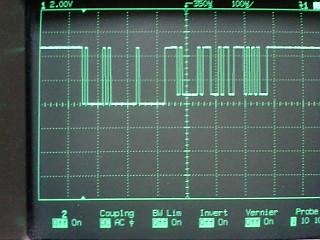
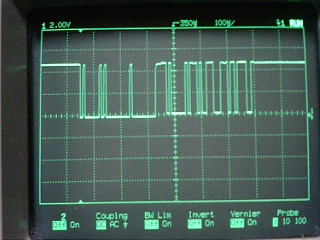
�܂��A�g�`�́B
�I�v�V�����{�[�h�قǂ���Ȃ����Ǐ\���Ƀ��x�����������Ă܂��B�@�ł́I�Ƃ������ƂŃL���v�`���[���Ă݂܂����B
�オ�v���A�b�v��R������Ă��Ȃ�����ŃL���v�`���[�������́B�i�����j�@�����v���A�b�v��R�����������ŃL���v�`���[�������́B�i�E���j
���ʂ��肻���ł��B�@��[�A���̋x�݂ɂł��S����ɉ�����K�p�ł��B
���V���Q�T����
�v���A�b�v��R�S�����܂����B�@���Ȃ����͂����Ԃ�Ƌ�J�����̂ɁA�S���O���͎̂v���̂ق���������ƍ�Ƃł��܂����B�@�����āA�L���v�`���[�͊T�˗ǍD�B�@�ł��A���܁[�Ɏ��s����̂Ńv���O�����ł̃G���[�L�����Z���͌��ǂ͂��Ȃ���Ȃ������ł��B
�L���v�`���[�������Ƃł����̂ŁA��̌��������B�@�_�u���ɂ��Ă���߂̕�𑊌݂ɋt�ɓ���Ă����肵�Ă��o�O�����Ăт����肵�����ǁA�l����ƍ������オ���Ă�����������Ȃ��B
���Ƃ��ƁA��ł��ĂȂ���[��I�@�ƌ����Ă����Ҋ߃��[���������ǁA�悭����ƃX�P�[��������Ă����̂ő傫�������Ă������ƂɋC�Â��܂����B
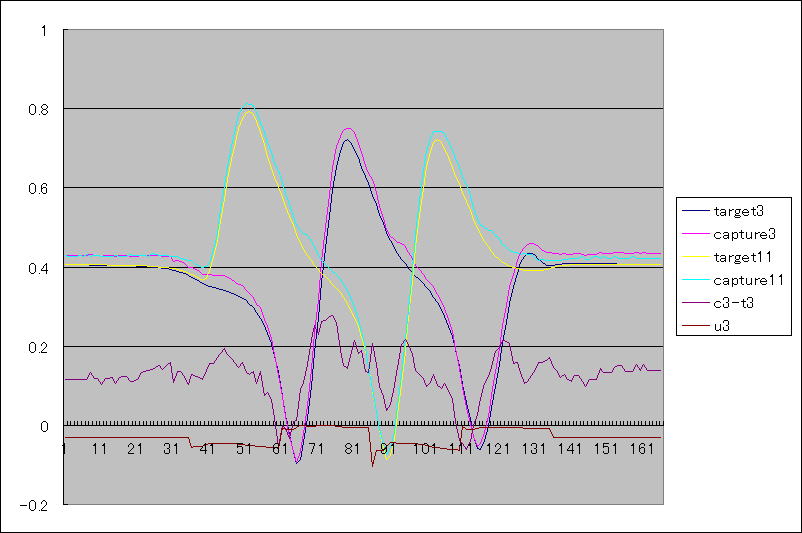
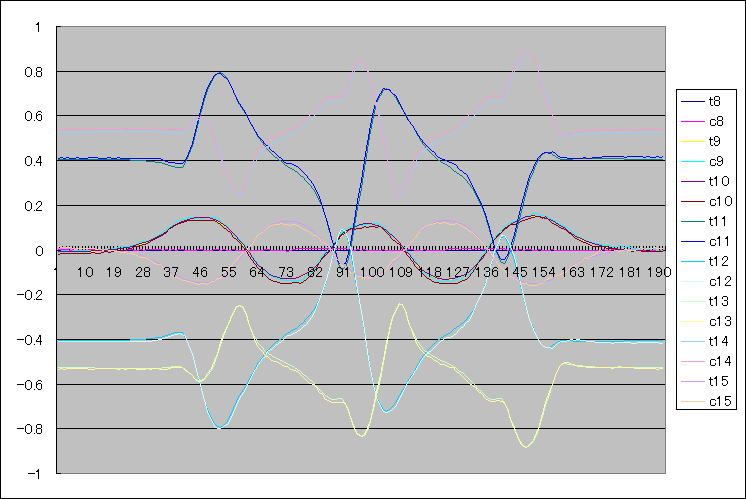
�オ�Ҋ߃��[���B�@������ڃs�b�`�B�@�ǂ������Ȃ��ł��B�O���t����c*-t*�Ƃ����̂̓L���v�`���[�ƃ^�[�Q�b�g�̍���5�{�ɂ��ĕ\�����Ă��܂��B�@u*���Ă̂͊ߕ��גl��K���ȃX�P�[���ɂ��ĕ\���B
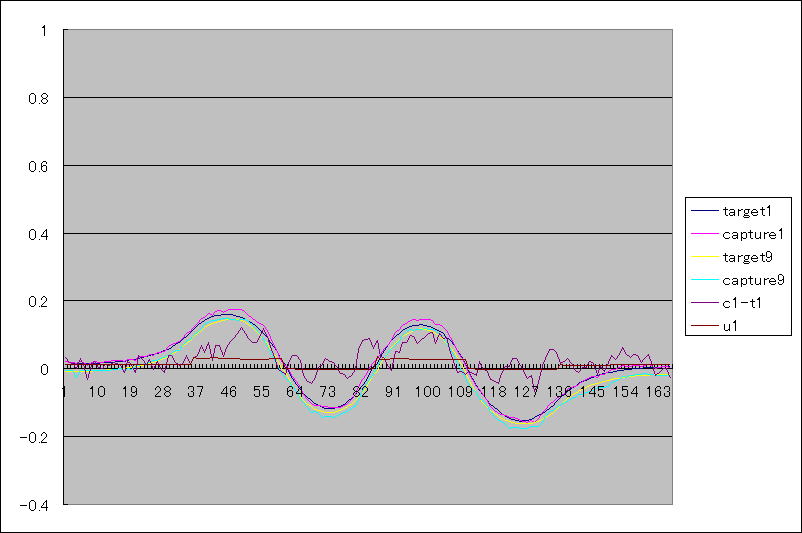
�w���l�Ǝ��l�̍����A�ߕ��ׂ̉e�����Ă���̂͂킩�邯�ǁA�߂̈ړ����x�ɂ��e���Ă܂��ˁB�@���������Ƃ��čs���Ă܂���B�������̕������ꂪ�傫�������肵�āB
����̑傫����������ƌҊ߃��[���̂���͏������̂����ǁA�Ȃɂ��Ҋ߂Ȃ킯������e�����傫���̂ł��B�@����ς��l�̎Z�o���̌������͕K�v�����ł��B�@����͊ߕ��ׂ̉e������ƌ����Ă��A�����ɂ͒x�ꂪ����悤�Ȃ̂ŁA��l�v�Z���x���z����������������������Ȃ��ȁB
���ƁA�O�������Ă݂悤�Ǝv���Ă����A�L���v�`���[�����ߊp�x����ZMP�̋t�Z������Ă݂܂��傤�B�@�ߊp�x�̂��ꂪ�ǂ̒��x��ZMP�̂���ɂȂ�̂��B�@�܁[�A�X���b�v��X�����z���ł��Ȃ��̂Ŗڈ��v�Z�ł����Ȃ��̂ł����B
���V���Q�T����
�ߊp�x��ZMP���v�Z����̂͌��\�߂�ǂ��������ƂɋC�Â��܂����B�@�Ƃ肠�����A���܂܂ŗv�肻���ŗv��Ȃ��������^���w�v�Z���i���L�l�j�B�@�܁A����͊ȒP�Ȃ̂ł����������ƍ��܂����B
�ŁA�L���v�`���[�����ߊp�x�珇�L�l�ŖڕW�l�Ɣ�r���Ă݂�ƁA
���E�B�@C���ē����Ă�̂��L���v�`���[�ł��B�@�Ҋ߂̊p�x���Ƃ킸���ȃI�[�o�[�V���[�g���A����ł�5�~�����덷������B
�O��B�@����������悤�Ȃ��́B�@������70�~���Ȃ̂ɗ����x�����Ԃ��ق�̏������邾���őO��U����100�~�����炢����B�@�����āA�Ȃ��킩������̍Đ��덷�������Ԃ�Ƒ傫���B�@�Ȃ�ȁ[����́B
�㉺�B�@����ς荶�����ς��B�@�m���ɕ����Ă�̌��ĂĂ��Б��ɕ��Ă銴���͂���B�@�ǂ����̂˂�������ł�̂��ȁH
�ߊp�x�����ZMP�v�Z���ł�����A����߂̂Ȃ炢����ɍĒ��킵�āA������ڒn����悤�ɂ���ZMP�t�B�[�h�o�b�N�����悤���ƍl���Ă����̂����ǁA�����������炻�ꂶ�Ⴞ�߂Ȃ̂�������Ȃ��ȁ[�Ǝv���Ă��܂����B
������T�|�[�g���˂Ȃ�ƁB
�F�X���s������J��Ԃ������ʁAY�����̑傫�Ȃ���͂Ȃ��Ȃ�܂����B�@�x���r�ƂȂ��Ă���Ƃ��͂Q�`�R�~���͒��ݍ���ł���悤�ł��B
�܂��A�Ҋ߃��[�����_�u���������Ƃ��ɍ���������N���i�Ɏ������̗]�T���L�������߃x�A�����O���O��ăK�^�t��������̂������̂ł�����A�@�����ăg�������Ē����B
����ƁA�Ȃ������������Ȃ������E���܂ł������ȃf�[�^��f���悤�ɂȂ��Ă��܂����B
�Ƃɂ����AY�������i�O������j�ɂ͏d�S��̂��߂�10�~���قǃI�t�Z�b�g������̂����A�����ڂɂ��������10�~���قǂ̃I�t�Z�b�g������B�@����Ȃ̂Ɋߊp�x����v�Z����ƃI�t�Z�b�g���ق�0�~�����Ƃ����̂�����[���������Ȃ��B
�F�X�Ƌ^���Ă͊m�F���钆�ŁA���Ⴊ�݂��ނƃT�[�{�̎w���l�Ǝ��l�̂��ꂪ�傫���Ȃ邱�Ƃ��B�@�����N���Œ肵�Ă��鎲���͂����Ă݂�ƑS�R���ʒu������Ȃ��B�@�Ȃ���́[�I�I�@�E���͂���܂���Ȃ����ǁA�����͂ǂ����悤���Ȃ��قǂ���Ă���B
���������������A�Ƃ��������ƒ��߂Ă��Ďv���o�����B
�����̑�ڂɎg���Ă���T�[�{�́A���̃T�[�{���ĐF�X�Ɛݒ肵�Ă��鎞�ɑ��������ĈႤ�T�[�{�̌ŗL�l����������ł��܂�����������B�@����ς肠�̌ŗL�l���ς��Ƃ܂��������炵���B
�悭���ׂ�ƁA���Ƃ���90deg�ƂȂ�l��ݒ肵�Ă�90deg�ɂȂ�Ȃ��B
�Ȃ�ƂȂ����v����������A�Ǝv���Ă��̂܂g���Ă����̂����Ƃ�ł��Ȃ����Ƃ������B(^^�U
�d�����Ȃ��̂ł��̌ŗL�p�����[�^�̒����ɒ���B
�܂��A�ŗL�p�����[�^�́A16byte�B�@���4�r�b�g�͏�ɂO�炵���B�@�����āA���Ԃ�4�����ЂƂ̃f�[�^�炵���B
09000000 09000000 09000000 09000000 ������Ȋ����B
4byte����4�p�����[�^�Ɣ��f���ĊԈႢ����܂��B�@�������u���b�N�����l�u���b�N�܂łőS�p�x���J�o�[�����l�ɂȂ��Ă���炵���̂ł��̑O��Œ����B�@������ۂ������ł��܂����B
���āA����ł��܂��������낤�Ǝv������A�����O�ƂقƂ�Ǖς��Ȃ��B�@�m���ɂ��ꂪ�傫���Ȃ�̂͂��Ⴊ�݂���ԂȂ킯����������Ă���Ƃ��͂���قlje���Ȃ���ȁ[�B�@�������E���ƍ����ł̈Ⴂ�͂Ȃ��Ȃ����B
�܂��A���E�������ɂȂ����̂ł悵�Ƃ��悤�B�@������A�ŗL�p�����[�^�����������ƋC�Â����i�K�ŁA�K���ȌŗL�l���ق肱�炸�ꂪ���ꂢ�ɏ��������Ƃ��������̂��B�@������Č�������܂�������������Ȃ��I
����́A�@��ڃ����N�́A�p�x���Č��ł��Ă�����̃T�[�{�ɑ傫�ڂ̃g�����l��ݒ肵�āA�����N��������ƍi�߂�Ƃ������Ƃ��B
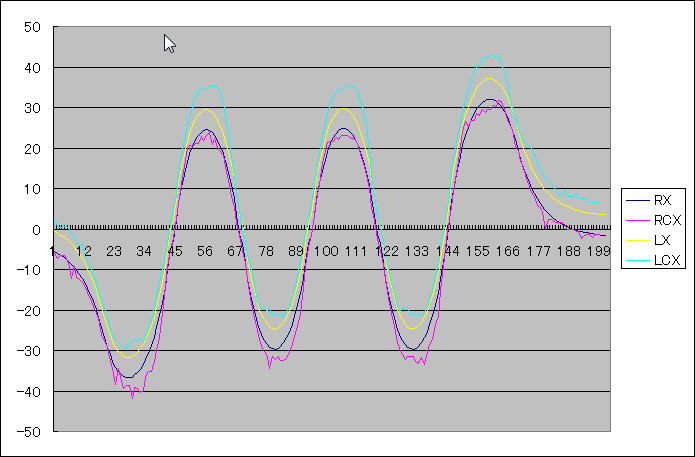
��̃O���t�́A���E�Ƃ��T�[�{�̊p�x�p�����[�^��60�|�C���g�قǃg�����l�����炵���ꍇ�̃L���v�`���[���ʂȂ̂ł����B�@�ߊp�x���Ƃ̂����͂ǂ����Ƃ����ƁA
�k����������Ă邩��A�������ǁA�܂����Ȃ������B�@����ł悵�Ƃ��ׂ����ǂ����͕ʂƂ��āA�ߕ��ׂƊp�x���ꂪ���ւ���悤�ɂȂ��Ă���̂ł܂��܂��B�B�B�B�@�@�@�����܂ł��y�j���̖�̏B
�@
����Ȃ���ȂŒ����܂ŃT�[�{�Ɗi�����Ă�������ŁA�[�����炢�ɗ��K��ɎQ���B
���������܂����n���Ȃ����Ƃ��ǂ�����ăt�H���[���邩���l���Ă����̂����ǁA��q��A��ė��K��ɎQ�����Ă���GIY����́A���̒n�ʂɋz���t���Ă��邩�̂悤�ȏd�S�ړ��̋Ɉӂ��Ă݂�B�@����͕G�̃N�b�V�������g���Ă��邻���ŁA�p��������Ȃ��悤�ɑ���E�G�E�Ҋ߂ƃX�g���b�`�ݒ�����Ă���̂��������B�@�d�S��������Ə���Ă��Ȃ��Ƃ���ȂɈ��肵�ėx��Ȃ���Ȃ��`�B
����Ɓ`�A�X�g���b�`���g��Ȃ���Ȃ�Ȃ��킯�����B�@�v�Z���s�ōĐ����x���グ�悤�Ƃ���̂ƃX�g���b�`�ŃN�b�V�����������悤�Ƃ���̂͑��e��Ȃ��Ȃ��B�X�g���b�`�ݒ�l�Ɗߕ��גl�̑��ւƂ��悢�̂����B