�J�������C���f�b�N�X��
�O�̃y�[�W��
���P�O���S����
�y�[�W�������ƒ����Ȃ��Ă��܂������10���ɓ˓����Ă��܂����̂ŐV�K�y�[�W�Ƃ��܂����B�@��Ƃ͐����ƒ��r���[�Ȃ�ł����B�B
���̃E�B�[�N�f�[�͈��݉��������A�c�Ƃ��������肵�āA���j����SEMB�����t���Ĉȗ����{�b�g��Ƃ͈�ł��܂���ł����B�@��T�̓��j����SEMB�Ƃ̐킢�͎v���̑��A���̓I�_���[�W���傫�������悤�ŁA���j���͂��������ŁA����ǂ����Ƃɒi�X���C�ɂȂ��čs���܂����B�@���݉���d�Ȃ����̂ŃA�Z�g�A���f�q�h�̍U���Ȃ��������肵�ĉɎ��Ԃ����������݂����B���j���ɂ���Ƃ������������Ȃ��Ȃ�܂����B(^_^;)
�������}���V�����̗�����L�����肵�ĂȂ��Ȃ��܂Ƃ܂������Ԃ����Ȃ������̂����ǁA�ߌォ��͋v���Ԃ�Ƀ��{�b�g��Ƃ��ł��܂����B
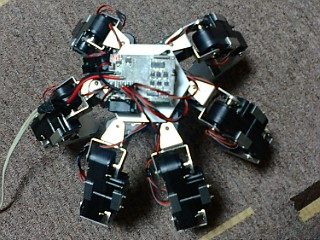
�����Ă����āA�Ƃ��Ƃ��V�O�}��SEMB��IK�v�Z�ŗ����オ���悤�ɂȂ�܂����B�@�܂����[�V�����Đ��Ƃ����s����͂ł��Ȃ��̂ł����B
�����Ȃ��Ƃ͂����A�����R���g���[���œ��̂̍����⑫�̍L����A�����ē��̂�O�㍶�E�ɂ��炷�Ƃ�����������w���ł��܂��B
IK�œ������̂͑��̍L����p���⓷�̂̍�����ς��Ȃ��������悤�ɂ��邽�߂ŁA�H�ʂɑ��ď_��ȑΉ�������悤�ɂ��������߂ł��B���̏������x�Ȃ�SEMB�͂��������Ȃ���ł����ǂˁB�V�O�}�̑���3���R�x�����Ȃ��̂�IK���ȒP�ł��B
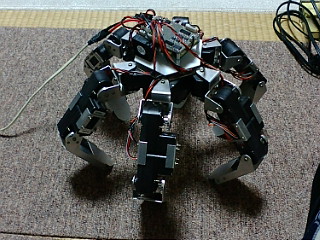
 �@�R���g���[���œ��̂�O�̕��ɂ��炵���Ƃ���B��ʏ�̕����O�Ȃ�ł��B
�@�R���g���[���œ��̂�O�̕��ɂ��炵���Ƃ���B��ʏ�̕����O�Ȃ�ł��B
 �@���̎p�����V�O�}���ۂ����Ă������ǁA�����͏��ɂ��肻���ł��B
�@���̎p�����V�O�}���ۂ����Ă������ǁA�����͏��ɂ��肻���ł��B
�J�o�[���Ȃ���ȁ[�B
���P�O���T����
�V�O�}������Ƌt�L�l�ŕ����o���܂����B
���i�Ȃ��360�x�A�ǂ̕����ւ��i�߂܂��B�������R���g���[���ł̎w���œ������̂Ŏ�����8�����ւ����������܂���B�@�^�[���͂ł��邯�ǃJ�[�u���s�͂܂��ł��܂���B�@���i�ƃ^�[��������Έꉞ�͑��c�ł���̂ŁA�܂������ł��傤�B�@
�������{�p���͕ύX���āA���̎p���ŕ��������ł���̂����ǁA���܂�Ƃ����n�ł��������܂���B�@���s���[�V���������A���Ɍv�Z���Ă��邾���ŁA�����̃��[�V�������s�ł��B
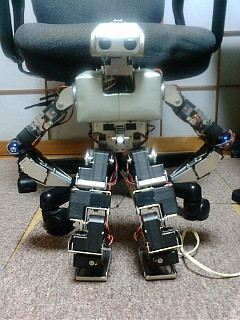
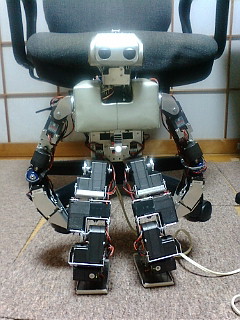
 �@�����@�r�f�I�J������Ў�ɁA�����Ў�ő��c�B�@�ނ���(>_<)
�@�����@�r�f�I�J������Ў�ɁA�����Ў�ő��c�B�@�ނ���(>_<)
�����o���������̂قƂ�ǂ�RPU-10�ł��o���܂��B�V�O�}�Ŗ{���ɂ�肽���̂͂���������Ɠ�����ƁB�@�ǂ�����Ď������悤�������������ǁA���������߂��������Ă���ɂȂ邩�ȁB
�����R���g���[���ł���RRC-R11�́A�R�l�N�^�łԂ牺�����Ă��邾���Ȃ̂����ǁA�U���Ō듮�삵�܂��B�@��M�f�[�^�̓m�C�Y��i�Q�x�ǂ݂Ȃǁj�����Ă��Ȃ��̂Ō듮��Ŗ\�ꂾ�����肵�܂��B�@����ƁA�T�[�{���K�V���K�V�������Ă��܂��A�ŏI�I��SEMB�����u�[�g���Ă��܂��܂��B�@���M�����[�^���낤�����������Ă���݂����Ȃ̂ŁA���炭�̓T�[�{�̓���œd���d�����ϓ����A���M�����[�^���o�͒ቺ���Ă��܂��̂ł��傤�B�@���u�[�g��������ƃT�[�{���ق�̂ł܂������o���܂��B�@OS���X���Ƃ��������Ƃ��͑����ɗ����オ��̂ł����ł��ˁB�@���܁A�e�ʂ��傫�Ȓ�h���b�v�^�C�v�̃��M�����[�^�𒍕����Ă���̂ŁA����ɏ悹��������̓���s�S�͂Ȃ��Ȃ�͂��Ȃ��ǂȁB
���āA���i������܂ł͈�U��āA�����_�̖߂�܂��傤�B
���P�O���V����
��������������݉�B�@������ӎނȂǂ͂��Ȃ��̂ň��݉�Ȃ��Ɗ�{�I�Ɏ��͈��܂Ȃ��B�@�Ȃ̂ŁA�x�̓����Ă̂͗v��Ȃ��͂��Ȃ��ǁA������Ƃ����݉���ŋx�̓����v�邩���ȁ[�B
�A��ƃV�O�}�̓d���Ɏg�����M�����[�^���͂��Ă܂����B�@�����ɂł��t���ւ��ăo�b�e���[�쓮�ł���悤�ɂ��܂��傤�B
����A�a�J�ɍs�����̂ŃV�O�}�̃J�o�[�ɂȂ镔�i�F���Ă݂܂����B�@�p�ȋ�����������ŏo�����߂ɂ����a���傫�߂̋��̃J�o�[�Ǝv���Ĕ����Ă����̂����A
 �@���傤�ǂ����傫���B�B�B
�@���傤�ǂ����傫���B�B�B
�C���[�W�Ⴄ�ȁ[�B�@�N���H�q�g�f�H���Ċ����ŃC���[�W���Ă����ǁA���ꂶ��^�R���ȁB�@����ȏ㒼�a�̑傫�ȃJ�o�[�ƂȂ�ƒl�i�����ˏオ��̂ł���ʼn䖝���܂��傤�B�@�V�O�}���\�ꂽ�Ƃ���SEMB�ɒv���I��Q���y�Ȃ���悢�̂��B�@�E�E�E�܂��܂����J���ɋ߂Â��������B(^_^;)
�����͌g�т̃f�W�J���ŎB�e���Ă�����ǁA�����͂���USB�J�����ŎB�e���Ă݂܂����B�@���ꂢ�ɎB���B�@�ł��A�������ƃ��[�V�����u���[�����������B����͓������{�b�g���Ƃ��������ȁB�����CMOS���Ⴞ�߂�CCD����Ȃ��Ƃ�����̂����B�@CCD��USB�J�������č�����ˁ[�B�@�uCCD�@USB�J�����v�Ō������Ă��o�Ă���݂̂͂��CMOS�����B�B
���P�O���W����
����ƃV�O�}���o�b�e���[�œ����悤�ɂȂ����[�B�@�e�ʂ̂ł������M�����[�^�ɕt���ւ��āA�ł��A�}�̂��ł����̂�SEMB�ւ̋����d����5V�ɂ��ăy���t�F�����{�[�h�̓d���Ƌ��ʂɂ��Ă݂܂����B�@����ƁA�h���b�v����d�����傫�߂����炵�����ăA�[�X���C�����߂��Ⴍ����M���Ȃ�܂��B������M�����[�^�{�̂��G��Ȃ����炢�B

���ꂱ��`�F�b�N���Ă���SEMB�̓d�����Ղ�B�B�B�@����[�тт������ǁA���M�����[�^��H�̔z�����O�ꂽ�����ł����B�@�L�����₵�����B
���ǁASEMB�ւ̋����d����9V�ɂ��āA9V����y���t�F�����{�[�h�̓d��5V�����悤�ɂ��܂����B ���M�͐����}�V�ɂȂ������ǁA���\�M���Ȃ�ȁ[�B���M���悤���ȁB
�q���Ȃ��œ������ƋC�������y�₩�ł��ˁB�@���グ����������Ȃ��āA������Ƃ�����Q���ɂ�����������B�@�_�������A�V�O�}�B�B�@���グ�������ύX�ł���悤�ɂ��܂��傤�B
���̂ق��ARRC�̎��t���ƁA�^�R�J�o�[�̎��t����������Ⴂ���������̂����A�F�X�����ă^�C���A�b�v�B�@�z���g�͍����̓����_�̎߂���肽���������ǂȁB�@������ƗL�������ȃA�C�f�B�A���������̂ł��āB�B
�@
�����͑��ʉ�Ȃ̂Ń��{�b�g���Ƃ͑����ł��Ȃ��B���j���̖�͍�Ƃł��邩�ȁ[�B�@�y���̓��{���������ˁB
���P�O���P�P����
ROBO-ONE�\�I�ɍs���Ă��܂����B�@����̓`�[���S�[��������Ƃ��ĎQ�������Ă��炢�܂����B�@�S�[��������̓X���[�v�͐ɂ������o��Ȃ���������ǁA���{�����V���b�v�܂Ƃ������Ƃŏ܂�������Ă܂����B(^�B^)
���W�R���œ����悤�ɂȂ����V�O�}�������Ă����āA�x�e���ԂɃC�K�A����Ɖ��֗����B�@���Č����Ă����̒[�����ł��傱���傱���������x�����ǁB�@�N�����ۂ��̂͌��\�ڂɕt���̂ŏ����͒��ڂ��ꂽ�݂����ł��B
���̌�A�T�����Ńl�W�̊ɂ݂��C�������ォ��A�Ȃ����V�O�}���������Ƃ��Ȃ��Ȃ�܂����B�ۃt�@�~���[�̖�����ޒ��ŁA�ҋ@����NHK�̎B�e�X�^�b�t�ƎG�k���Ă��̂ł����A����ς�N���^�ɋ����������Ă��ꂽ�̂ɂ܂Ƃ��ɓ��������Ƃ��ł��Ȃ������B�@���̏�ł͑��M�@�̓d�r���Ȃ��Ȃ����Ƃ��A�����̍��M�炵���Ƃ������Ă����ǁA�A���Ċm�F�����炻���ł͂Ȃ��炵���B�@
�܂��A�M���̎�M�͐���ɍs���Ă����炵���B�R���r�j�̍����d�r�����͖̂��ʂł����B(^_^;)�@�T�[�{ON�Ƃ��T�[�{OFF�Ȃ̈ꔭ�R�}���h���Ȃ��Ȃ��t���Ă��炦�Ȃ��B���āA��������A�p����ς����肷��A�R�}���h��A���ő��M���Ă���P�[�X�ł͖��Ȃ����삷��B�@�����Ƃ��Ă�RS485�̑���M��ւ��̃^�C�~���O�����������̂ł͂Ȃ����Ƃ����C������B�@����ɂ��Ă��U�X���Ȃ������Ă����̂��}�ɓ����Ȃ��Ȃ�ɂ͉����ω����������͂��Ȃ̂����A���Ȃ낤���H
�@
ROBO-JAPAN�Ń��{�b�g�W�e�Ђ̓W�����������B�@�֓����{�b�g�A���ŁAARM�̒����^CPU�{�[�h���W�����Ă������AOS�t����10���~���炢�炵���B�l�i����������ȁ[�B�@�t�^�o�ł́A�t�@�[���ł����b�ɂȂ������Ɉ��A���邱�Ƃ��ł��܂����B�@�T�[�{�̐V���i���o��炵���A���^�y�ʑ�g���N�Ŋ��҂ł������B�iRS601CR��j�@�d������Ȃǂ�601�̂܂܂炵���B
JIN������A�Ȃ�����̃X�^�b�t�Ƃ��ĎQ�����Ă���ꂽ�̂����A�܂��F�X�Ƙb�����Ƃ��ł��܂����B�@JS���{�e�B�N�X����̐V���i�A���҂��Ă܂��B
�����_�������Ƃ����Ƃ����˂ȁ[�B�݂�Ȃ̊J���̃X�s�[�h�i��Ƀ��J�A�n�[�h�́B�j�ɂ͋������܂��B�����_�̂悤�ȃ\�t�g�J�������Ă���Ƃ��̂悤�ȃy�[�X�ł͊J���ł��Ȃ��ł��ˁB�@�i����͈�d�Ɏ����̔\�͂̂����Ȃ̂����j
���e���ɂ͍s�����ɑ����A���Ă����̂����ǁA�����肵�Ă��܂����̂ʼn����ł����B���������Ă��Ă͉����o���Ȃ�����Q�邵���Ȃ����[(~o~)�B
������ROBO-ONE�����B�@��͂�ςɍs���܂��B�@���̌�̑ł��グ�ɂ��Q���������B�@��������ǃo�g���͏o�Ȃ������ŁB�@�V�O�}����˂��`(^^�U
���P�O���P�Q����
ROBO-ONE�����ɍs���ė��܂����B�@����͐F�X�ʔ��������`�B�@�o�g�����̂͂�͂�y�ʋ����������낢�ł��ˁB�X�s�[�h�������邵�A���͂͝h�R���Ă��邵�B�@�d�ʋ��͂܂����삪���肵�Ă��Ȃ��ȁA�Ǝv���Ă�����I���j���A���N�m�����n���ł����̂��o�Ă��Ă�����܂��ɂ��邵�B
���ʂ͑O�c�����OMNI���D�����������ǁA���N�̃I���j�͂��܂܂ł̔������������Ă��܂��Ă����̂͂�����Ǝc�O�B�@������A���N�m���̓������̂����肵�Ă��钆�ɂ�����x�������ċ����܂����B
���B�X�g���������������̂Q��̒���^�@��ROBO-ONE�ɓ����������g��͑����傫���悤�ŁA�{���Ă���l���������B�@�q���[�}�m�C�h���{�b�g���l�Ɠ����T�C�Y�ɂȂ�̂͋Ɏ��R�Ȃ��ƂŁA����Ɏ��g��ł��郔�B�X�g���͂��炵���̂�����ǁA���̃��A���T�C�Y�q���[�}�m�C�h���z�r�[���{�b�g�̃t�B�[���h�ł���ROBO-ONE�ɓ��������̂͂������Ȃ��̂��Ƃ������Ƃ��B�@�����ʋ�������Ă��Q�`�R�䂵���o�Ă��Ȃ��N���X��100���~�o�����Ƃ��ł������ɂȂ����A�ψ���͍��邩���ˁB
����A�r�����[���ύX��A��^�@�͗\�I���Z�̏������珜�O���ꂽ�X���[�v�ł����A���͂���`���v���W�F�N�g�̎��ɂȂ�����Ɂu���܂���Ȃ�ǂ����܂����H�v�Ɩ₢�������Ĉȗ��A����܂ō\�z���Ă�����ߋ̍\���Ƃ����܂��āA�]�݂��̒��́A�܂��߂ɐ���ŃX���[�v�U�����s�����Ƃł����ς��ɂȂ��Ă��܂��B�߂̌������A�s���n�̕��s�ƁA�X���[�v�ɕ키���߂̊�b�Z�p�Ƃ��čl���Ă��܂��B�@�����ψ����͑��̗��ɃZ���T�[�������܂Ȃ���Ȃ�Ȃ��ƌ����Ă܂����A�߂��瓾������ł������Ȃ��Ƃ��ł���Ǝv���Ă��܂��̂Ŏ����Ă݂����Ǝv���܂��B�@���܂���������X���[�v���N���A���邽�߂�����ROBO-ONE�ɏo�Ă݂悤���ȁB
ROBO-ONE��͏j����ɎQ���B�@�݂�Ȃ́A���{�b�g�ŗV�Ԏp�͂ق�Ƃɂ����܂����ł��ˁ[�A���������_�����Ă��A�����_�̓f���P�[�g�Ȃ̂ł����ƃr�r�b�ē����Ă����܂���ł��B(^_^;)�@���̂������ʔ��������ł���B�@�������x�݂Ȃ̂Ŏc���Ă��l�̓I�[���ŃJ���I�P�̐��ł��傤���B�@�����̓��{�b�g�J���ɖv���������̂łP������ő��X�ɑގU�B�@�������̂ō��邩��J���ɒ���ł��邩���B
�@
ROBO-ONE���I��������ɗ����ΐ삳��ɁA�u�����̂�ف[�Ղ��́u���ȏ��v�Ȃ�Q���\�Ȃ̂łU�{���ŏo�܂��v�ƁA���U�����B�@���鑫�������{�b�g���Ă��̕ӂ肶��V�O�}�ȊO�͌��o���Ȃ��B�@���������̂��U���ƁA���܂ɂ̓C�x���g�o�Ȃ���ȁB�Ǝv���Ă������Ȃ̂ł��ז�����Ȃ���Ώo�Ă݂܂����[�B�@�Ƃ���Łu�v�`�v���ĂȂɂ��́H�@�O���ł킳�킳���čU���ł���悤�ɂ��Ă��������ł����H�@(^�B^)
���P�O���P�R����
����̗]�C���g���ă��{�b�g�J���ɂ������ށB�@�����̃e�[�}�͎߁B�@���Ȃ����܂ŏ����e�X�g���Ă݂��̂����A���܂��s���Ă��Ȃ������B�@��A�̃V�O�}�̑g�ݗ��Ă��I������̂ōĊJ�B
�H�ʂɕ키�ɂ͊߂������y���^�b�`�œ����˂Ȃ�Ȃ��̂����A�T�[�{��ON�ɂ��Ă�����A�g���N���[���ł����\�Ȓ�R������B���ꂶ��A���n�����Ƃ��Ɋ߂����������ɓ]��ł��܂��B�@���߂āA�T�[�{��OFF�ɂ�����Ԃ��炢�ɂ͌y���Ȃ���Ȃ�Ȃ��B
���T�Ԃ̍l�@�ƊۂP���̎����ŁA�v���e���V�����������邱�ƂƁA�p���`���ŏ��ɂ��邱�ƂŃT�[�{OFF�ɂ��Ă��鎞�����y���͂ŊO�͂ɉ����邱�Ƃ��ł���悤�ɂȂ����B�@������ƃI�[�o�[�V���[�g�C���Ȃ̂��C�ɂȂ邪�A�Ƃ肠�����͂���Ő�ɐi�߂悤�B
���H�ɕ키�f������肽�������̂����A���̂��߂ɂ͒��n����Ƃ��߂Ɣ\���߂̐�ւ��Ƃ����������˂Ȃ�Ȃ��̂ŁA�ʂ̃f�����l�����B
�߂̂ق��ɂ��ߐ���ōl���Ă���A�C�e���Ƀ\�t�g�����N������B
�����_�̓����N�\���ł͂Ȃ����A�ߊp�x�̎擾�Ƌt�L�l�v�Z���g���ă����N�\���̂悤�ȐU�镑������邱�Ƃ��ł���B�@�����N�\���̗��_�͑傫��2�����āA���S�̂̎��R�x�𐧌����邱�ƂƁA�߂̃C���s�[�_���X���������邱�ƂȂ̂����A�\�t�g�����N�͑O�҂̗��_���\�t�g�I�ɍČ�������̂��B
������ǂ��Ŏg�����Ƃ����ƈ��H���s�Ɏg���킯�����A���̃A�C�e���i�\���߂̐�ւ��Ƃ����n����Ƃ��j�������ď��߂Ė��ɗ����ƂɂȂ�̂ŒP�Ƃ��Ƃ�����ƈӖ�������Â炢�B
����f���̐����B�@������ꂽ�����_�̑��̃T�[�{�͑S��ON�ɂȂ��Ă���̂�����ǁA���G�̃T�[�{�̓g���N���[���ł��B�@�ߏ�ԂƂȂ��Ă��āA�p�x���Ď����āA�����̕����ɍ��킹�ăe���V������������悤�ɐ���i���Ăقǂ���Ȃ����ǁj���Ă��܂��B
���S�̂͏�ɓ��̂Ƒ����������W�ɂȂ�悤�Ȋp�x�ɂȂ��Ă��āA�G�������Ƒ��̊߂�����ɕ���ē����܂��B�@����ŁA���̂̌X���ɉ����đ����L�яk�݂��܂����A�����x�Z���T�[��W���C���Z���T�[�Ŏp�������Ă���킯����Ȃ��ĕG���߂ƂȂ��Ă���̂ŕG�����d�͂ɏ]���ĉ��Ɍ������Ƃ���킯�ł��B���̊߂͂���ɍ��킹�ē����Ă���Ƃ������Ƃł��B
���Ȃ݂ɐ���Ĉ��H���s�����������łɎ߂�K�p����͕̂G�ł͂Ȃ��A����߂ł��B
���āA���͒��n����B
���P�O���P�S����
���n����͂����ł��邩�ȁ[�ƁA�y���l���Ă����̂�����ԈႢ�ł����B
�G�̊p�x���Ď����āA�w���p�x�Ƃ̍����̋ɐ��ł킩�邩�ȂƎv���Ă����̂����A�����ł����B�@���s���̎w���p�x�Ǝ��ۊp�x�ɂ͒x�ꂪ���邵�A�X�ɂ͘H�ʂ̂킸���Ȓi���Œ��n�^�C�~���O�̍������m����ƂȂ�����A�Ď������͂ǂ�قǒZ���Ȃ���Ȃ�Ȃ����B�@������ƍl����킩�邱�ƂȂ�ł����ǂˁ[�B(^^�U
�����݂ł������25ms�����̊������Ȃ������̂Ń_���ł������ǁA5ms���炢�������猋�ʂ͂�����ƈႤ��������܂���B
5ms�ł̃g���C�͒u���Ƃ��āA���͋@�B�I�i�d�q�I�H�j�Ȏ�i�Ō��o�ł��Ȃ������������Ă݂܂��B
�R���g���[����SEMB�ɂ��āA�����X�C�b�`�ŁA�@�Ƃ����̂͂܂��ʂ̘b�Ƃ������ƂŁB�B
���P�O���P�U����
�F�X�ƍl���Ă݂����A���n����Ƃ����͓̂���B
�l������ς��āA�G���T�X�y���V�����ɂ��āA�i�����z��������ɐ�ւ��Ă݂邱�Ƃɂ����B
�߂̃f���̂悤�ɕG�̊ߊp�x���g���ă\�t�g�����N���\�����A�G�͎߂ł͂Ȃ��A�T�X�y���V�����߂ɂ���B�@������d�Œ��ݍ��ނ̂����A�\�t�g�����N�ɂȂ��Ă���̂Ō�ɔ���Ԃ��Ă����邱�Ƃ͂Ȃ��B
���ۂɕ��s���s���ꍇ�͎x���r�̓T�X�y���V�����G�ɂ͂��Ȃ��őS�̏d���x����B�@�V�r�������T�X�y���V�����G�ɂ���̂ŁA�����i�����Ȃ���Β��ݍ��݂��N�����Ă����Ă��܂��B�@������O�ɃT�X�y���V�����G��ʏ�G�ɐ�ւ��Ȃ���Ȃ�Ȃ��B�@���܂��������ȁ[�B
����̃\�t�g�����N�{�߂̎��̃v���O�������C�����ăT�X�y���V�����G�ɂ��Ă݂�B�@�G���M���b�R�M���b�R���ĂȂ��Ȃ����������B�@�g���N30%���Ǝ��d�ɕ����č��荞��ł��܂��B40%�ȏ�Ȃ�Ȃ�Ƃ����荞�܂Ȃ����A�����ɂ��Ⴊ�ݍ��܂��ƕ��A�ł���قǂ̃g���N�ɂ͂Ȃ�Ȃ��B�@���b���ȁ[�B�@�R���v���C�A���X�X���[�v�ƃg���N�����܂�����������������̃|�C���g�������邩������Ȃ��B�B�B�@�Ƃ��������ł����B
�T���͊֓��g���K��B�@����̓����_��A��ĎQ���������Ȃ̂����A��A�̃X���[�v�Ή�����������Ă��ď�����S�R����ĂȂ��B�@���K��ň��������X���[�v�Ή������̑��������邵���Ȃ����ȁB
���P�O���P�V����
���i17���j�͗͐s���ĐQ�Ă��܂����̂ō��̕��̓����B
�����͊֓��g���K��B�@�����_�������Ă�������Ȃ��ǁA�|����d�U�q�ŕ����Ĉȗ��A���܂��������Ă��Ȃ��B�Ӗ��s���ȕ�l�������Ȃ��Ă������郂�[�V�����������ł���悤�ɂȂ�����A���܂܂ł͑J�ڎ���0.3�b����30�o�Ƃ����悿�悿���s�����o���Ȃ������̂��A�J�ڎ���0.5�b����50�o�ł�������悤�ɂȂ����A�Ƃ����̂����ʁB
�����A���肵�ĕ��s�ł���Ƃ͌����������A�����ŕ�������ɂ͂܂��܂��s����ȏ�ԁB
�F�X�ȃp�����[�^�ŕ������Ă݂�ƁA���E�̐U�����삪���X�ɓ����O����N�����čŌ�͉��ɐ�����ԂƂ����p�^�[����������B�@�����_�̓O���b�v�������A���ʂ͏�ɃJ�[�y�b�g�ŕ������Ă���̂ŃX���b�v�ŗ͂�������Ƃ������Ƃ������̂��B
�|�����낤����d���낤���U�q�Ȃ���ŗL�̐U�����Ƃ����̂����݂��Ă��āA����Ƃ̍������ȁA�ƍl���Ă�����ƒ��ׂĂ݂��B
�܂��A�U�q�̓������Ƃ����̂����邪�A���m�ɂ͐��藧���Ȃ��炵���B�T�C�N���C�h�U�q�ɂ���ΐ��藧�̂����A�ʏ�̐U�q�ł͐U�����傫���Ȃ�Ǝ����͒����Ȃ�B���̎��̎����̎Z�o�ɂ��Ă͑ȉ~�ϕ��Ƃ���������w���g���K�v������炵���B
�U�������������͂�����̏d���Ɉˑ����Ȃ��Ƃ����u�������v�����藧�̂����A�����
T=2��iL/g�j
�ŕ\�����B
��d�U�q�ɂ��Ắu�J�I�X���ϑ��ł���v�����Ȃ̂ŋK�������Ȃ��Ƃ������Ƃ��B�@�r�̒����Ƃ�����̎��ʂ������U�q���A�����ꂽ�A�Ƃ��������Ȃ�����̎Z�o�������������B�@�U�����[�h�ɂ����2�̎��������݂���炵���BT1��1�i�ڂ�2�i�ڂ��������œ����AT2�͋t�����œ��������ꍇ���B
(��1) = ��{(g/L)(2-��2)}
(��2) = ��{(g/L)(2+��2)}
(T1) = 2��/(��1)
(T2) = 2��/(��2)
�����ɂ��Ƃ������L���傫���Ȃ��T�͑傫���Ȃ�B�@�ӂށA����͂������낤�B
�ł��A������O��̌����Ƃ��čl����ƁA�X���͏����قȂ�B
 �@
�@
��r����2�̕��s��{�p���B�@����������������Ă��܂��Ă邪�C�ɂ��Ȃ��ŗ~�����B
�E�͎��������Ɖ��ɐ��炵�Ă���B�@�d�S�̌v�Z�ł͉E�̕����d�S���킸���ɉ��ɂȂ邽�߁A�P�U�q�̌v�Z�ł͐U�q�̘r�̒����͒Z���Ȃ�B�@�Ƃ��낪�A�����P�U�q�ł͊������[�����g�Ǝ��ʂŌv�Z����̂ŁA�x�_���痣�ꂽ�Ƃ���Ɏ��ʂ���������傫�Ȓl�ƂȂ��āA�U�q�̘r�̒����������Ȃ�B�i�����ł����x�_�͉E���Ҋ߂ł��j�@���̏ꍇ�͑����P�U�q�Ōv�Z�����460�o���x�Ȃ̂ɑ��ĉE�̏ꍇ����700�o�B�@�����āA�J�ڎ���0.5�b����50�o�ł̏ꍇ�����A�E�̕��͕�����̂ɑ��āA���͈��肹���A�قƂ�Ǖ����Ȃ��B
��ʓI�ɃO���b�v���̏ꍇ�́u�d�S�������������s�����肷��v�C���[�W�����邪�A�������́u�������[�����g���傫���ƕ��s�����肷��v�Ƃ����ׂ����B�@�܂�A������ɍL���Ă����肷����Ă��Ƃł��ˁB
�܂�A�ŗL�l�Ƃ̃Y���ɂ���ē����Y�����������Ă���Ƃ͌�����Ȃ��B���肷��p����������ɂ͒P���ɏ㔼�g�̊������[�����g��傫���������������������Ȃ��ȁB
���낻��ב��肵�Ȃ���B
���P�O���P�W����
�����͊֓��g���{�b�g���K�� in ����c��w�B
�����O�̃e�X�g�������˂āA����c��w�ł̊J�ÂɂȂ������������A���̓_�ł͉��̋��͂��ł��܂���ł����B�X�C�}�Z��(^^�U
�����_�������Ă����āA�����ƃ\�t�g�����N�̃e�X�g���A���s�p�����[�^�̒�����������Ă܂����B
�P���ԍہA�ꉞ�����Ă������V�O�}���o������A���ς炸�������B�@�z���g�A�����͌��h���������݂������ˁB�@���ɃA�j���C�_�[����̐H����������������(^�B^)�@���{�b�g�A�j���I���{�b�g�Ƃ͒������ł���H
�v�Z�œ����Ă邷���[���Ęb�����A�V�O�}���������_�̌v�Z�̕������{�����G�œ���������������Ă���ǂˁ[�B�@�܁A�����_�͂����[���ē��������Ȃ�����ˁB(^�B^)
�@
�����͐ΐ삳��A�C�K�A��������NHK-BS�@�M����b�̎��^�ɂ����������B�@�T�A�K�O���[�g�L���O�J�C�U�[�̃o�g��������Ƃ��B�@�������I���Ō������ȁ[�B�@�C�K�A����̃}�l�[�W���[���Ă��ƂŃX�^�W�I�ɓ���Ă��炦�Ȃ��ł����[�B
���P�O���Q�P����
���j���̓C�K�A����̃}�l�[�W���[�Ƃ���NHK�̎��^�ɍs���Ă��܂����B�@�����āA����͈��݉�B
�����͏��������c�Ƃ��ċA���Ă����̂�����ǁA�Ȃ���PC�Ɍ}�����͓̂����ς�钼�O�B�@���ꂩ�炿����Ƃł����{�肽���Ƃ���B
�V�O�}�ő����̂�ف[�ɏo�����Ȃ̂ŃV�O�}�Ɏd���݂����Ȃ���Ȃ�Ȃ��B�@�Ȃɂ��V�O�}�͕����邾���B���������ٌ̈`�̃��{�b�g�Ȃ̂ɂ���������ƁA�����A�Ȃɂ��~�����Ƃ���B�@���[�V�����Đ��@�\���Ȃ��̂łǂꂭ�炢�d���߂邩�킩��Ȃ����ǁA������ƍl���Ă݂悤�B
�Ȃ̂�����ǁA�����_�̃X���[�v��������������Ďd���������B�T�X�G�ő����݂����Ă݂����̂����ǁA�\�t�g�����N�Ƃ��߂̎����Ɏg���Ă���v���O�����ɂ̓T�[�{�𑀍삷��N���XJoint�����g�ݍ���ł��Ȃ��B�@�����_��������邽�߂ɍ������p�N���X������g�ݍ��ޕK�v������B�@�N���X�ɂ��Ă邩��ȒP�Ȃ͂��Ȃ��ǁA�葱�����ǂꂾ������̂����ׂȂ���킩��Ȃ��B(^_^;)
���āA���������ς���Ă��܂��Ƃ��낾���ǂ�����Ƃ���������Ă������B
���P�O���Q�Q����
�����Ɍ����āA�V�O�}�̃v���O�����C���B�@�V�O�}�͂Ƃ肠����������悤�ɂ��������Ȃ̂ł���������ƕ��s����肱�݁B�@������ς�����A1�����~�܂��悤�ɂ�����B�@�ł��A�܂����[�V�����Đ��Ƃ������^��ł̎p���ύX�Ƃ��͂ł��Ȃ��B�@���i�g�ݍ���ł�������B
�����_�̓T�X�G�ł̕��s�Ɍ����Č����E�����B
�T�X�G�ɂ���ƒ��ݍ��݂��N����̂Œ��ݍ��������������グ���p�x���w�����Ă������͂��B�@���̊p�x�����������������ăv���O�������Ă݂����A���̂����������ŋ��L���J��Ԃ��Ă��܂��B(^_^;)�@��������E�̑������ŋ��L������̂����������ςȂ��ƂɁB
�T�[�{�̔�����CPU�̏����������x�����߂ɂ����Ȃ��Ă��܂��̂��B�@�ȒP�ȃv���O�������Ⴞ�߂Ȃȁ[�B�@����������ƍ�荞�݂��K�v�ł��B
���P�O���Q�T����
�T�X�G����̑����B
�T�X�G�ŕ������邽�߂̌�����i�߂�B
�T�X�G�ɂ������̎��d�ɂ�钾�ݍ��ݗʂ��������������悤�Ƃ������A�T�[�{�̔����ɂ͒x�ꂪ����̂Œx����l�����Ă݂�B�@���܂�l�߂����������Ă͋��Ȃ����A75ms�قǑ҂ĂƂ�ł��Ȃ����U�͂��Ȃ��ōς݂����B�@�������A�O����^����ƕ�ʂ��U������̂Ńu�����R�݂����ɂ�ꂿ�Ⴂ�܂��B�h�ꂪ��������ƍŌ�ɂ͔��ɕ��s���n�߂܂��B�������܂Ƃ��ɂ͕����Ȃ����ǁA�Ȃs�v�c�Ȋ����B(^_^;)
�t�B�[�h�o�b�N�ŕ�ʂ��ł���͎̂~�܂��Ă��邩��ŁA�����Ȃ���͓������@�ł͂ł��Ȃ��B
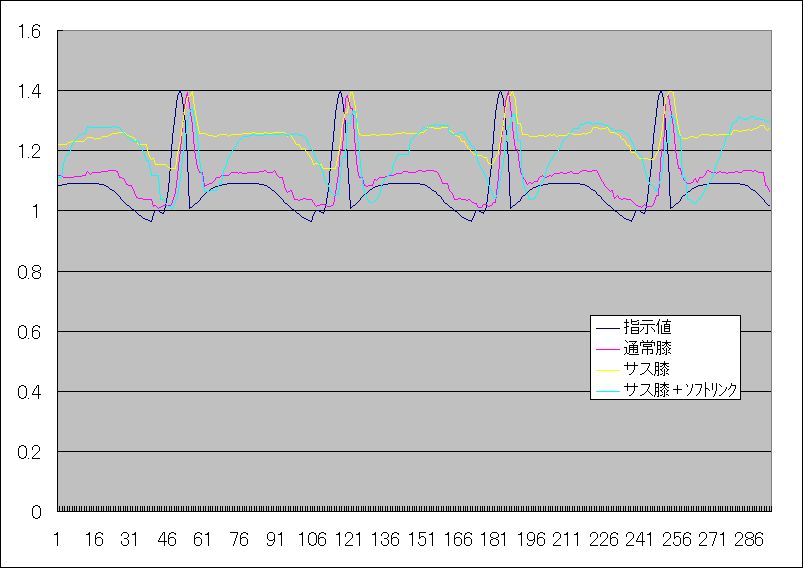
���̉摜�̓T�X�G�ł̎p������̗l�q�B�ÓI�Ȃ��̂����琧����Ă̂͌����߂��ł����B
 |
 |
 |
 |
| �@�ʏ�G | �A�T�X�G�ɂ������� | �B�T�X�G�{�\�t�g�����N | �C�T�X�G�{�p�x� |
�ʏ�̍d���G���Ƈ@�̂悤�Ȋ����B������x�[�X�Ƃ��āA�@�G�ɃN�b�V����������ƁA�A�̂悤�ɏ㔼�g���_���Č�X�ɂȂ�܂��B
�����Ń\�t�g�����N�����āA���ꂽ�G�ɂ��킹�đ��̊߂�����ƁA�㔼�g�̎p���͉���̂����A������Ɛg������߂ɂȂ��Ă��܂��܂��B���ꂪ�B�B
�T�X�G�ɂ������߂Ƀ_���Ă��܂����������p�x�ɂ����̂��C�B�@�C�̏�ԂɃ\�t�g�����N����ꂽ�ꍇ�������Ƃ��w���p���ɋ߂���������܂���B
�\�t�g�����N���������T�X�G�ŕ��s�Ƃ����̂͂ł������ȋC��������ǁA���������グ��ۂɎ��d�ł̒��ݍ��ݕ������ʂɂȂ�܂��B�\���ȑ��グ���ł����ɕ����Ȃ��̂ł͂Ȃ����Ǝv���܂��B�@���s���쎞�̊p�x���g�ݍ���Ń\�t�g�����N������K�v�����邾�낤�ȁ[�Ǝv���܂��B
�ł́A����̕��s���[�`�����o���邾���ύX�����Ɋp�x��{�\�t�g�����N���������悤�ɃN���X���C�u�����̉������s���܂��傤�B�@�ǂ����Ⴂ���낤�ȁ[�B(>_<)
���P�O���Q�U����
�����͂�ف[�v�`�̎Q���\�����ݓ��B�@�m���A10�����炾�����ȁ[�Ǝv���Ȃ���9���O��PC�̓d�������Ċm�F������9������ł����B�{�Ƃ�范�����\�����ݍ��킶��Ȃ��̂͂���ς�F�����Ȃ�����ł͂Ȃ��ł��傤���B
�V�O�}�Ő\�����݁B�@B�삳����샍�{�ŏo��݂���������ΐ푊���B�삳��Ō��܂�Ȃ̂ł��傤���ˁH
�V�O�}�̃o�b�e���[�̓����_�p�ɔ������T���_�[�p���[�����p�Ŏg���Ă܂��B�@�ł��A�Q���������ĂȂ��B�@����Ȃ������獢�邩���A�Ǝv�����̂����ǁA�T���_�[�p���[������ł����ƈ���enRoute�̃��|��2�����܂����B���3000�~���炢�ł����B�T���_�[�p���[�̔��z�ȉ��ł��B�@�ł��A����傫���ďd���B

�����A�����_�ƃV�O�}�ɓ��ڂ��Ă݂���A�����_�ł͖��Ȃ��̂����ǁA�V�O�}�ɂ̓M���M������Ȃ��I�@�t���[��������ƍ��Ȃ���B�B(>_<)
�t���Ă����R�l�N�^���^�~���^�������̂ŁA�s�^�ɕt���ւ��B�@�ȑO�ɃR�l�N�^���̃o���������Őڑ��s�ǂ��������̂ŁA���O�ɓ��ʃ`�F�b�N����������Ƃ��܂����B�@�Ƃ��낪�A�͂t������������ƁA�ڑ��s�ǔ����I�@����͂ǂ��������Ƃ��[�[�H�H�H�@�@�@�@�E�E�E�E�ǂ����A�͂t�����ɃR�l�N�^�̃n�E�W���O�������M�ŕό`���Ă��܂��炵���B���₭�͂t�����邽�߂�50W�̃R�e���g���Ă���̂������ɂȂ����̂��B
���M�̂��߁A�[�d�p�̃P�[�u����ڑ�������ԂŁA�ł��邾���葁���͂t�����邱�Ƃł��܂��s�����悤�ł��B�@�F�X����ȁ[�B
�@
���āA�����_�̃T�X�G�̑����ł��B
�\�t�g�����N�́A�T�[�{�̒x����l�����đO�t���[���̎w���l�ƌ��t���[���̎��p�x���r���č���������B�@������r�S�̂ɓK�p���ĕ��������悤�ɂ��Ă݂܂����B
�T�X�G�{�\�t�g�����N�B�@���߂��߂ł��B
�T�X�G�������̂��A�\�t�g�����N�������̂��B�@�܂��̓T�X�G����߂ă\�t�g�����N�����ɂ��Č������Ă݂܂����B
����܂�Ӗ����Ȃ����̂����ǂ����������������Ȃ̂ňꉞ�f�ځB��
���悶��悭����Ȃ����ǁA�\�t�g�����N�������������肵�Ă��銴��������܂��B�@�ł��A�����グ�铮�������������Č�ɉ������Ă��܂��܂��B�@��͂�A�T�[�{�̒x����悭�c���ł��Ă��Ȃ��悤�ł��B
�ǂ������܂������Ȃ��B�B
�����ŁA���S�ɗ����Ԃ�A�Ȃ��\�t�g�����N���K�v�Ȃ̂��H�@����͒��n�������ɘH�ʂ������ł͂Ȃ������ꍇ�A���҂����ʒu��荂���ʒu�ɏ����鏰���R���Ă��܂��A�s����ɂȂ�ƍl�����܂��B���n���肵�āA�����ő���������̂��~�߂�����̂����ǁA���m�Ȓ��n����͂ł��Ȃ��Ǝv���A�T�X�G�̓������l�����B�@�����āA�G�������Ƃɂ��p���̕�������邽�߂Ƀ\�t�g�����N���K�v�ƂȂ�B
�܂�A�����グ�镔���̓T�X������Ȃ��Ă��\�t�g�����N����Ȃ��Ă������킯�ł��B�@�ł͐�ւ�������̂��H�@�Ƃ����ƃT�X�G��ʏ�G�ɐ�ւ���͓̂���B�@�w��p�x��蒾�ݍ���Ԃ���قڎw��p�x�ɂȂ�ʏ�G�ɐ�ւ���Ƃ��������ł��܂��܂��B
�ǂ����悤���B�B
��`�A�A�܂��̓T�X�G�ŁA�p�x����s���Ďx���r���Ԓ��ɒʏ�G�ɐ�ւ��邽�߂̉����������Ă݂悤�B���p�x�Œʏ�G�ƃT�X�G�ō����Ȃ���Βʏ�G�ɐ�ւ�����킯�����B�i����ȊȒP�ɂ͂����Ȃ��낤���ǁj
���グ���s��Ȃ��ŁA���E�̔�������ł̒��ݍ��ݗʂ̑���B�@�O���t�̂͂��߂ƏI��肪�Ȃ����ă��r�E�X�̗ւ̂悤�ɂȂ���܂��B�d�S�̈ړ��ɏ]���Ē��ݍ��ݗʂ���������̂��킩��܂��B�@���͏d�S�����Ă���̂̓O���t�̒����ӂ�Ȃ�ł����ǁA�T�X�����ƒx�ꂪ�傫���āA�����x��ɂȂ�܂��B
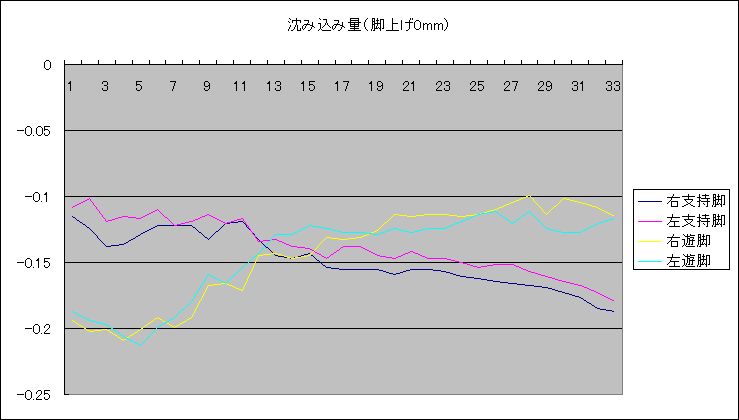
���グ�����Ă݂���A���ݍ��݂��傫���Ȃ邩�Ǝv������x���r�̒��ݍ��ݗʂ͂قڕς�炸�B�@�V�r�ŎR�ɂȂ��Ă��镔���������グ�Ă���Ƃ���B���ݍ��ݗʂ��قƂ�ǂO�ɂȂ��Ă��܂��B
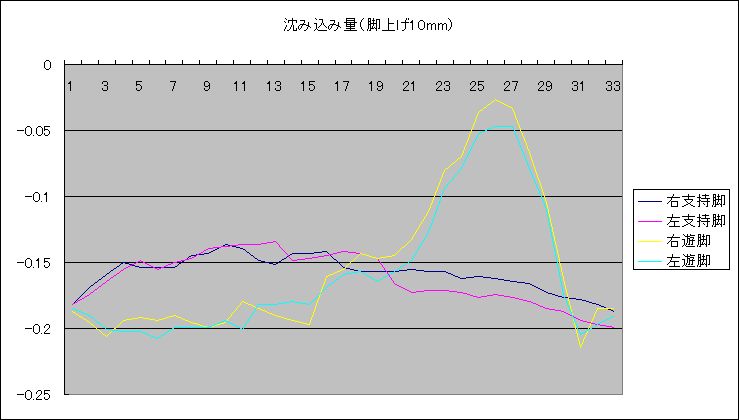
���Ȃ݂ɂ����̃f�[�^�͉^�����̃T�[�{�̒x�ꂪ45ms���x�ɂȂ�O��Ōv�Z���Ă��܂��B
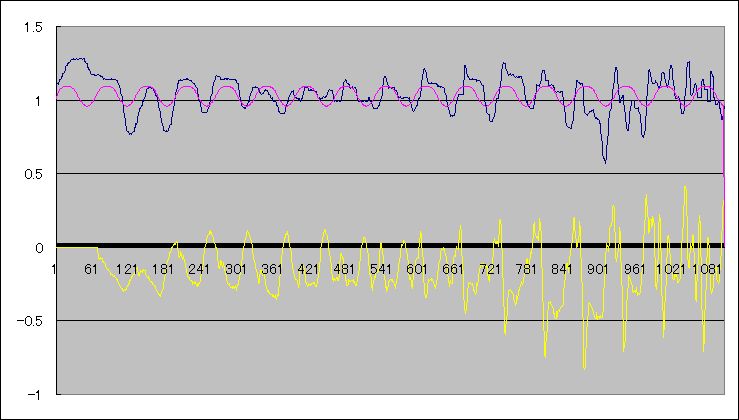
�����āA���̒��ݍ��ݗʂ��g���ĕ�ʂ��o���A�����݂����Ă݂邱�Ƃɂ����̂����ǁA���ꂪ�����S�R���߁B�@���X�ɕ�ʂ��C�����Ă����悤�ɂ����̂����A���U���Ă��܂��B�x�ꐧ�����B
���i�X�Ђǂ��Ȃ��Ă����l�q
�@
�X���[�v���܂��߂ɍU�����悤�Ǝv���Ďn�߂����H���s�̌��������ǁAROBO-ONE�̗\�I���Ȃ��Ȃ����̂ŁA�����_��ROBO-ONE�ɏo�邱�Ƃ͂Ȃ��Ȃ��Ă��܂����ȁ[�B�@���H���s�͂������Ȃ���Ȃ�Ȃ����猟���͑����邯�ǁA�X���[�v�U���͈Ӗ��Ȃ������ˁB
�@
�y���Ƃ������_�̃T�X�G�ɂǂ��Ղ�ŁA�\�肵�Ă����V�O�}�̃v���O������S�R���Ȃ������B�@�E�B�[�N�f�[�͗\�薞�ڂ����A�������ȁ[�B
���P�O���Q�W����
��ف[�v�`�܂ł�����T�Ԃ�����B�@�y�j���͗F�B�̌��������߂łƂ����݉�Ȃ̂œy�j���̗[���܂łɑS�Ă̏������I��点�Ȃ���Ȃ�Ȃ��B
��ف[�v�`�̋��Z�͂��܂胂�[�V�����ɍH�v�͗v��Ȃ����ȋ��Z�����A�{�g���g���N�V�����͂�����ƐS�z�B�@�V�O�}�͑���6�{�����邯�ǁA�ڒn�ʐς͂قƂ�ǃ[���ɋ߂��̂ŃO���b�v�͂͂��܂�Ȃ��̂��B�S�R�����Ă݂Ă����Ȃ��̂łǂ��Ȃ邱�Ƃ��B
����͈��݉�ō�Ƃł��Ȃ������̂ŁA�����͑��߂ɋA�낤�Ǝv���Ă����̂����A���̎����͂����炱�����1�N��2�ԖڂɖZ���������B�@�Ă̒�A�����͋A�ꂸ�A�v���O�������ł������Ȏ��Ԃ���Ȃ��B�@�A��ƒ������Ă����t�@���t���q�[�g�V���N���͂��Ă����B�@���܂܂�SEMB�̃q�[�g�V���N�̓t�@�����������ʂ̃q�[�g�V���N�Ƀt�@�������t���Ă����̂����A�t�@�����O��Ă��܂����Ƃ������B�@�����Ǝ��t���Ȃ��Ⴂ��CPU������Ȃ��Ǝv���Ă����̂ł�����ƍ������t�@�����̃q�[�g�V���N�𒍕����Ă����̂��B
����������o�b�e���[���V�O�}�Ɏ��t���Ȃ������܂߂āA�V�O�}�����Ă�����ƍH��B�@enRoute�̃��|�����܂�悤�ɂȂ�܂����B�@�q�[�g�V���N���t�@���t���q�[�g�V���N�Ɏ��ւ��Ĉ���S�B�@���Ƃ̓��[�V������������Ώ��������̂͂��B�@�@�@�@�E�E�E���A����ɉ����O���b�v���₷���S�����Ȃɂ������t���Ȃ���ˁB�J���J�����Ăă����O�����߂Ă��܂���������Ȃ��B
�@
�����_�̃T�X�G�ɂ��Ă͂�����ƌ������B�@�������͎̂x���r���T�X�G�ɂ���͖̂��d�����Ă��ƁB�߃C���s�[�_���X�������Ă邩�猾�����ƕ����Ȃ��B�@���Ȃ璅�n���������ŁA�ł��邾�������ʏ�G�ɐ�ւ����i���������邱�Ƃɂ����B�@�܁A�������I����Ă���ł��ˁB
���P�O���Q�X����
���������̓V�O�}�̃v���O�����ɂƂ肩����B
�܂��͑���Ƀv���X�`�b�N���̃G�b�W�K�[�h�����ă����O�\�ʂ������Ȃ��悤�ɂ��܂����B�@�ł��A���̂������ł��܂܂ł��O���b�v�������Ȃ�܂����B(>_<)
���s�ɂ��Ă�������Ɛi���B�@�R���g���[���ŃO���O���Ǝp����ύX�ł���̂����ǁA���̕ύX�����p���̂܂܂ŕ�����悤�ɂ��Ă݂��B�@�ǂ������V�[���Ŏg���̂��͕s���B
�{�g���g���N�V�������ǂ�قǂł���̂��A������Ƃ��������Ă݂��̂����A�܂����������_�����ۂ��B�@����6�{������̂ɂȂ��`�B�@�N���^����Ȃ��ă������^�ɂ��ׂ����������B
����͂����ƁA�t�@���t���̃q�[�g�V���N�͂Ȃ��Ȃ�����ǂ��B�@12V��i�̂Ƃ����d���������ĉĂ���ɂ��ւ�炸�A�q�[�g�V���N�͂��܂�M���Ȃ��Ă��Ȃ��B�q�[�g�V���N�̍������Ⴍ�Ȃ������A�悩�����悩�����B
�L���[�u�ŁA�O��2�{�ŃL���[�u�������グ�āA�c��4�{�̑��ŕ������Ă̂���肽���������A���ԓI�C�͓I�ɕs�\�Ƃ݂��B���̎��R�x����l���Ă��������ۂ��̂ł��肮�肵�������ł��܂������Ƃɂ��悤�B�@�o�g������������A�Ȃ��[�V�������v�邾�낤�Ǝv���Ă������A�K���ɂ��o�g�����Z�͖����݂����Ȃ̂ŕ�������������`�B
 �@������Ǝ߂�����Ԃ���ł��l�������ɕ�����B
�@������Ǝ߂�����Ԃ���ł��l�������ɕ�����B
 �@����Ȋ����ł��B�B�@�N������Ȃ��A�Ⴄ�����ۂ��ĂȂ��Ȃ��C�J�X�B
�@����Ȋ����ł��B�B�@�N������Ȃ��A�Ⴄ�����ۂ��ĂȂ��Ȃ��C�J�X�B
���P�P���Q����
�����͂�ف`�v�`�ɏo�ꂵ�Ă��܂����B
�V�O�}�ŏo����ł����A���r�ŏo���̂�B�삳��̃G���h���X���ƂڂƃV�O�}�̂Q��B�@�G���h���X���Ƃڂ̃p���t���ȓ����Ɉ��|����Ȃ�����V�O�}�������������ł����܂����B�@�_�b�V���Q�O�O�O�͑��c�~�X�Ŏ��͈ȉ��̋L�^�ɁB�@�S�z���Ă����{�g���g���N�V�����͈ӊO�ƍs���āA�Q�D�Q�������炢�^�ׂ܂����B�@�L���[�u�́A�ŏ����������ŃX�^�[�g�����̂ɁA���ǃK�b�g�ɏ�O�ɉ����o���ꂽ�̂����₵�������ł��ˁ[�B�O���b�v������ă��x���W�������Ƃ��ł��B�@�@�����B�B�@
�����̃��{�b�g�v�����X�͎Q�����Ȃ��Ń����_�̃T�X�G�̑�������낤���ȁ`�Ǝv���Ă�����ł����A�C���C�������Ė����������܂ōs�����ƂɂȂ�܂����B�@�����I�}�^����A�����ΐ삳��I
�@
����́A�[������F�l�̌������߂łƂ����݉�������̂ŁA�o�����鎞�Ԃ܂Ń��{�b�g��Ƃ����Ă��܂����B�@�ŏ��A�V�O�}���������Ă�����ł����A��������炢�ł������ȁ[���ĂƂ��ŃV�O�}�͏I���B�@�c��̎��Ԃ�C7��Linux��UVC�h���C�o�[�̑g�ݍ��݂�����Ă܂����B�@�l�b�g��̃C���X�g�[�������̒ʂ�ɂ͂Ȃ��Ȃ��s���Ȃ��Ă��傢�Ɩ������̂����ǁA�Ȃ�Ƃ��C���X�g�[���͊����B�@OpenCV�̎����p�ɔ����Ă�����UVC�Ή�Web�J�������Ȃ��ł݂��������Ȃ��B�@���Nj����I�Ƀh���C�o�[���W���[�������[�h���Ăǂ����J�����͔F�����ꂽ�݂����B�@�������܂��A�v���ʼn摜�L���v�`���[�Ȃǂ͂ł��Ă��Ȃ����炿���ƂȂ����Ă邩�͂킩��Ȃ��B�@�ڑ��̂���J�����ɂ��������悩�������ȁB��̂��Ȃ�Ă��������낤����UVC�Ή��Ƃ������Ă���Α��v�Ɣ��f�����̂������͂��ł��������I�H
���P�P���S����
�������{�b�g�t�B�X�e�B�o���i(^�B^)�j�ɎQ�����Ă��܂����B
�o�ꂷ��\�肶��Ȃ�������ł����A�ɂ��₩�����{�b�g������Ȃ����Ă��Ƃ������̂ŁA�샍�{�ɍ������ĎQ���B�@���̌�̓X�^�b�t�Ƃ��ă����O�e�ɂւ���Ă��Ԃ���ϐ킵�Ă܂����B���ƁA�d�����j���W�������Ă��������܂����B
�ٌ`�Ȃ̂Ń����O�̏���Ő��̏�̕������ɍ������Ă������A�����������n���Ċ����ŎŐ���������Ă܂����B�@���w���̔����͂킩��₷�����ǁA�c���̔������Ȃ��Ȃ����킢�������ł��ˁB������x�߂Â����ǁA���{�b�g���߂Â��ƌジ���肵�ē������Ⴄ�B�@�ł��A�܂��ߊ���Ă��āB�B�@�x�r�[�J�[�ŐQ�Ă�q���ɖ������V�O�}�������悤�Ƃ��邨�Ƃ�����Ƃ������肵�܂����B�@���̎q����[������Ƃ킩���ł���B��������B
�V�O�}�̕��s�͍��͂܂����n��p�̌��߂������[�V�����i�p���ɉ����Čv�Z���邯�ǁA�n�ʏ����t�B�[�h�o�b�N���Ȃ��Ƃ����_�Łj�Ȃ̂ŁA�Ő����x�̕s���n�͕����邯��NJ��ɂȂ�ƕ����Ȃ��B�@������Ƃ����J�����Ė{���̈Ӗ��ł̃V�O�}�𑁂��d�グ�����ł��ˁB
�@
�ł��A�V�O�}�͂�����ƒu���Ƃ��āA�A
��������̓����_�̑����ł��B�@����܂ł̖ڕW�͎����Ń��{�r�����[�h�ł������ǁA�Ƃ肠�����N�����̂�ف`�̃_�b�V�����Z�������ŏo�����ł��ˁB
�T�X�G�̑����B
���s���̃T�X�G���Ԃ��o���邾���Z������̂��e�[�}�ɐF�X�����ł��B�@�ʏ�G����T�X�G�ɐ�ւ���̂͗V�r���Ԃ����炢���Ƃ��āA�T�X�G�Œ��n���Ă���ʏ�G�ɐ�ւ����i���K�v�ł��B
�܂��͐Î~��ԂŐ�ւ��B�@�����ԂƐÎ~��Ԃ���S�R�������قȂ�̂����ǁA��͂�ŏ��͐Î~��Ԃ������Ă݂܂��B�@���Ȃ݂ɍ����͊ȒP�ȃf�[�^��肵���ł��܂���ł����B
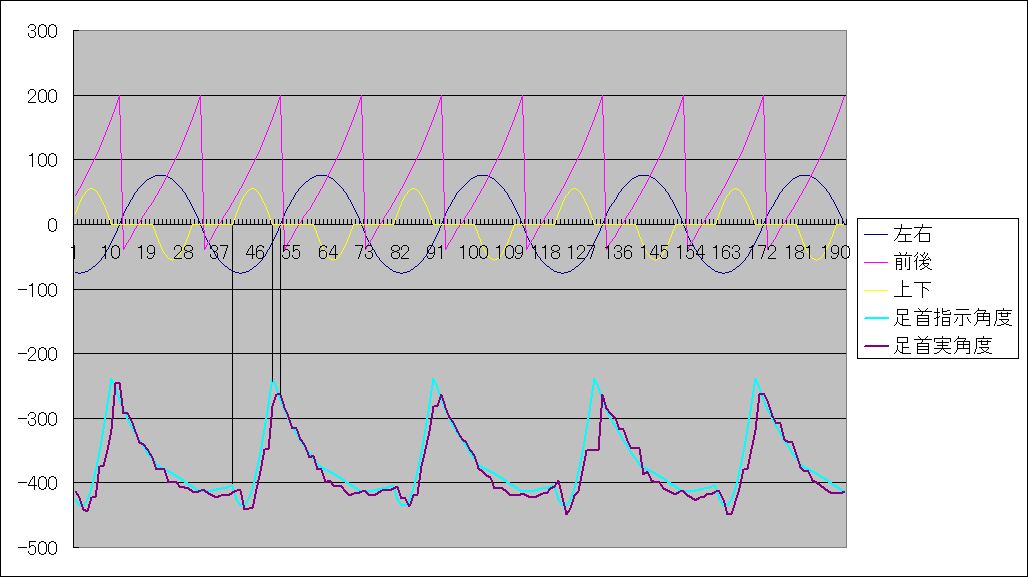
�G�̎��p�x�Ǝw���p�x�̗l�q�ł��B
���p�x���傫�����̓T�X�G���g���ĕG���Ȃ����Ă���l�q�B�@���{�b�g�������グ��Ɠ��R�p�x�̊W�͋t�]���܂��B
�����āA�O�`���O�`�����ƂȂ��Ă���͕̂���[�h�ɓ������Ƃ���ł��B�₪�Ĉ��肵�āA�����Ƃ̎w���p�x�̃��C���Ɏ��p�x������Ă��āA�w���p�x�͂��̕����ɉ������Ă��܂��B
���Ȃ���Ȃ�Ȃ��̂́A�G���Ȃ����Ă����Ԃ���A�ʏ�G�ɐ�ւ��āA���p�x�����̂܂܂ɂȂ���ĕ��@�ł��B��������쒆�ɁB�B
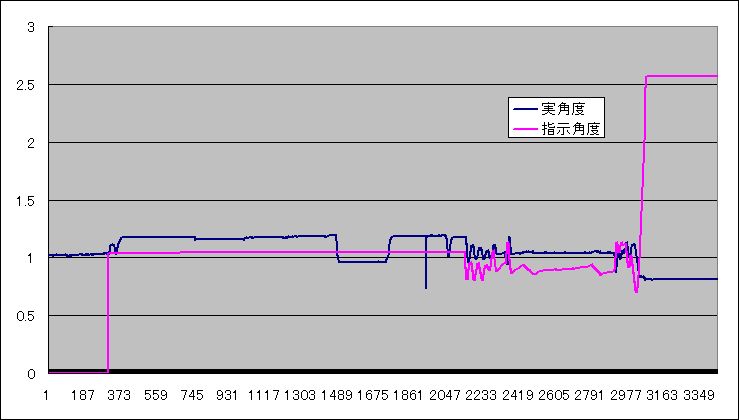
���̃O���t�Œ��ڂ��ׂ��Ȃ̂̓��{�b�g�������グ�Ă���܂��G�Ȃ����ԂɂȂ��Ă��镔���i�摜�����A1675�́u5�v�̕ӂ�j�@����A�����グ��ԁi�����������͕����Ă��Ȃ���ԁj����ς��Ǝ�𗣂�����Ԃł��B�@�U�������Ɉ��l�ɗ��������Ă��܂��B����Ȃ�A�U��������҂K�v���Ȃ��̂Ŕ�r�I�ȒP��������܂���B
���Ƃ���������ƌ����������������Ă݂Ȃ��Ƃ����Ȃ���������܂��B
���̓X���[�v�ݒ�l�Əɍ��킹���w���p�x���ɐ�ւ��āA�X�����ƒʏ�G�ɐ�ւ��邱�Ƃ��ł��邩�������܂��B�@����ωߓn�I�ɐ�ւ��Ȃ���_���ł��傤�˂��B
���P�P���T����
�����́B�@�Ώ����V�}�P���ł��B
�����_�̑��������Ƃ����Ȃ���A�����͋A���Ă���A�V�����������v�����^�[�����@�ƃf�W�J���̃Z�b�e�B���O�ł��B�f�W�J���͏[�d���ĉƑ��Ɏg���������邾���Ȃ��ǁA�v�����^�[�̓v�����^�[�w�b�h�̃Z�b�e�B���O����k�`�m�ڑ��܂ŁA���\���Ԃ�����܂����B�@LAN�ڑ��^�C�v�ɂ����̂ŁA���ꂩ��͉Ƒ��pPC���������鎞���v�����^�[�̓d�������邾���ł悭�Ȃ�܂����B�R�s�[���o���邵�A�X�L���i�[�ɂ��Ȃ邵�A�悩�����悩�����B
�f�W�J����Panasonic DMC-FX37�A�v�����^�[��Canon��MP980�@�ǂ�����V���i�Ȃ̂�2���~���傢�Ŕ������Ⴄ��ł��ˁB�@�������ł��B
�f�W�J�������ċv����������ł����A����ɔ������f�W�^�����t��200������ɂȂ�Ȃ��ƉƑ�������o�܂��āA�R���p�N�g�f�W�J�������ƂɂȂ�܂����B������䔃���Ȃ�J�V�I�̂��̃f�W�J�����~�����������ǂȁ[�B�@�ς��ɂȂ�Ȃ����A�������ŋp���ł��B
���ĂƁA�Ђƕ��C���тĂ���ЂƎd�����܂����ˁB
�@
���C����オ���ă����_�̌����B
���n�̃^�C�~���O�ŐF�X�d�������Ǝv���Ă�̂ŁA�ł��邾���V�r���Ԃ���肽���B�@�����_�͑���̃R���v���C�A���X��傫�����Ă���̂ł�����ꕔ�ύX���邱�ƂŎx���r���������肵�ėV�r���Ԃ����Ȃ����ȁ[�Ƃ��A�@�T�X�G����m�[�}���G�ɐ�ւ���ꍇ�̊p�x�����𑪒肵�Ă݂��肵�Ă܂����B
�����炱���炢�������Ă��邤���ɂȂ����������Ȃ��Ă��܂��A�\�t�g�����N�Ǝ�������ɓ�������ƁA���Ȕ��U���������悤�ɂȂ��Ă��܂����B(>_<)
�\�t�g�����N�Ǝ���������܂��g���T�X�G����m�[�}���G�ւ̐�ւ��̂��߂̊�b�f�[�^���ȒP�Ɏ���͂��������̂ɁB�B�@�܂��͂��������Ȃ��Ă��܂��������̏C������B�@�Ȃ��V�����Ƃ��Ȃ��ł��ˁB
���P�P���U����
�ΐ삳��́u�v�����������g���v�ɂ��܂���o��B�@�������킳��Ƀ_���[�W��^������ł��B(^_^;)
���̎��́A�����������A���̏�Ԃ��瓮�����ƌ���ꂽ���Ζ������Ȃ��Ǝv������ŁA���ו��U�ł��Ȃ����Ǝv������ł��B�ւ�Ƀ_���[�W�^�����Ⴂ�܂����ˁB�����܂���B�@�Ȃ��ł��܂��낤���ގ����ł͓����Ă܂�������ˁB�������ł���B
�ł��A��l�H�D���{�b�g�A���c���Ă݂��������ł����ǁB(^�B^)
�@
�������T�X�G����m�[�}���G�ւ̐�ւ������B�@����̕s��͏C�������B�@�F�X�Ǝd����Ŏ������Ă܂����B�@�Î~��Ԃł̃T�X�G�˃m�[�}���G�̐�ւ��́A�\�t�g�����N���������Ă���ƃ_���B�@�ǂ�����Ă��u�K�c�b�v���Đ�ւ��܂��B�@�\�t�g�����N����āA�G�ȊO�̃T�[�{�ɉe�����o�Ȃ��悤�ɂ�����ɁA�X���[�v���ւ�����̒��ݍ��ݕ����l�������p�x�ݒ�ƃX���[�v��ւ����s���ƁA�قڃX���[�Y�ɐ�ւ��܂��B������Ɓu�X���v�Ƃ��u�݁v�Ƃ������o�邭�炢�B
��������ē��삵�Ȃ��炤�܂���ւ��ł�����Ă��Ƃ���Ȃ���ł����ǂˁB
���āA���͑����Ȏd���݂��K�v�B�@�����ݓ���ɂ����āA�V�r���ڒn����O�ɃT�X�G�{�\�t�g�����N�̃R���{����n���ĕG�����ݍ��Ƃ���Ń\�t�g�����N����ăm�[�}���G�ɐ�ւ��A�@�Ƃ����̂���肽���B�@�ȂA�Ƃ��Ă��ł��Ȃ������B�@���̂���ł��̏T�����I��肻���ȗ\���B�@�����������ƐȂ��Ȃ��`�B
���P�P���W����
�T�X�G�ł̑����݂̑O�ɁA����߂��߂ɂ��āA���n�ɍ��킹�Ĕ\���߂ɐ�ւ�����������邱�Ƃɂ��܂����B
�����l�����A�߃N���X��passive mode���Ă̂�����đg�ݍ���ŁApassive���̓g���N0�Acompliance slope���ő�ɂ��܂��B�@passive off�ŁA���̎��̊ߊp�x����荞��Ńg���N��^���܂��B
����ŕ������Ă݂�ƁA�ӊO�ƕ��ʂɕ����Ă�B�@�܂��A�Ζʂ���荞�ދ@�\�͂Ȃ��̂ŕ��n���������܂��B�@�߂̊p�x���̎悵�āA���������Ă݂�ƁA�A
�܂��͔\���߂̂܂܂ł̕��s��
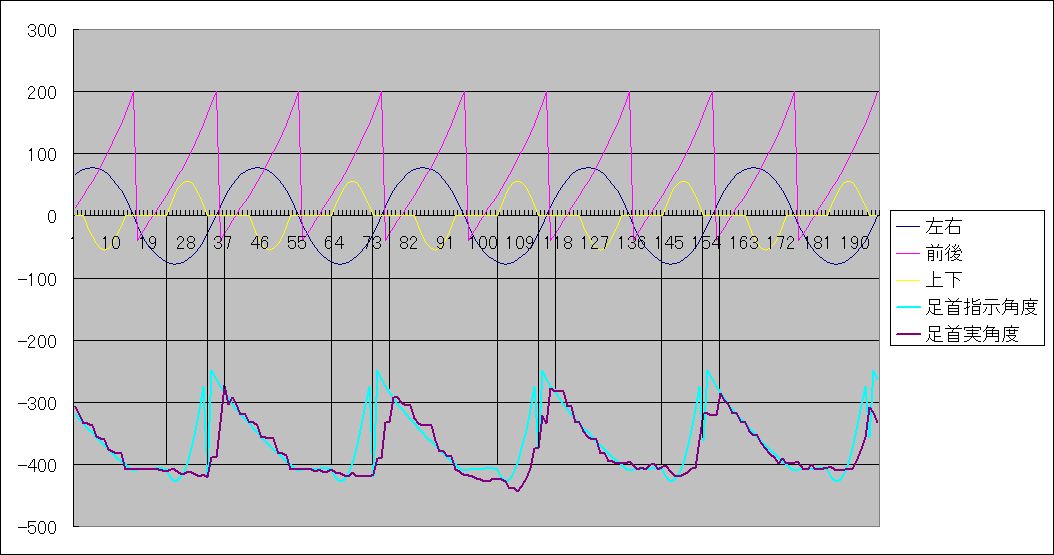
���グ����͑��x�������̂ŏ����x��Ă܂����A���n��2�t���[�����炢�i50ms��j���炢�Œǐ����Ă��܂��B
���Ɏ߂̏ꍇ�A�����グ����ԁi���F�̃��C�����|�b�R�����Ă�����ԁj�͎߂ɂ��Ă��܂��B��
����͂�����Ɖ�����K�v�B�@���グ�J�n�ƂƂ��Ƀg���N���Ȃ��Ȃ�̂ŁA�p�x�w���ɊW�Ȃ��A�ߊp�x�͕ς��܂���B�����āA�w�����Œ��n�ƂȂ������̊ߊp�x�ɍ��킹�Ďw���p�x��ݒ肵�Ă��܂����A���͂��̊p�x����荞��ł��Ȃ��̂ŁA���̃t���[���ŕ��n��z�肵���w���p�x�ƂȂ�܂��B�@���炭�̓g���N���߂�̂ɏ������Ԃ�������̂ł͂Ȃ����Ǝv���܂��B
�����グ�n�߂�Ƃ���ő���߂̊p�x���ς���Ă��Ȃ��Ƃ������Ƃ͑������n���鎞�_�ł͂ܐ悪�����オ���Ă����ԂƂȂ��Ă���͂��ł�����A�����璅�n���邱�ƂɂȂ�͂��ł��B�@���p�x�͎w���p�x����͎�̒x�ꂪ����̂ŁA�w���p�x���Œ��n����͂��̃t���[���ӂ���������n����悤�ł��B�@���������3�`4�t���[���قǂ������Ďw���p�x�ɒǂ����Ă���悤�ł��B
���{�b�g�S�̂��X���Ă��Ȃ����Ƃ�O��Ƃ���ƁA���n�t���[����4�t���[���ӂ�̊p�x����荞��ŁA�n�ʂ̌X���Ƃ���ΘH�ʂ̌X���ɒǏ]�ł��邩������܂���B�@�E�E�E������̏ꍇ�������t���[���ʒu�ł����̂��ȁH���܂�傫�ȌX������Ȃ���قڕς��Ȃ��͂������ǂȁ[�B
�@
���̓���́A���E�̓��삪���肵�Ă��Ȃ��Ă͂Ȃ炸�A���E���삪�I�[�o�[�V���[�g���Ă��܂��ƒ��n�^�C�~���O���ς���Ă��܂��̂ł��܂��s���܂���B�@�����I�[�o�[�V���[�g����Ɖ��ɂ����]�Ԃ̂ł���ǂ��낶��Ȃ��ł����B
���ہA��ɏ����̓I�[�o�[�V���[�g���Ă���炵���̂ŁA����߂��ł��܂܂��ƃI�[�o�[�V���[�g���đ����������Ă��܂��܂��B����Ɩ߂蓮��̐U�����X�ɑ傫���Ȃ�Ō�ɂ͓]�т܂��B�@���̂��߁A�����_�̑��E�߂̓R���v���C�A���X��傫�߂Ɏ���Čy���ߏ�Ԃɂ��Ă��܂��B�@���E�ߊp�x���Ď�����I�[�o�[�V���[�g���삪�n�܂�l�q�͌��o�ł������Ȃ̂ł����A���̏�ŃI�[�o�[�V���[�g��}�����i�����̂Ƃ��날��܂���B�@���x���g���C���܂������A�������Ă��Ȃ���ł��B
���Ȃ݂ɍ���͂قڃX���b�v���ɂ��āA�I�[�o�[�V���[�g���ɂ������܂����B�J�ڎ���0.5�b�Ȃ�����邯�ǁA0.3�b���ƃX���b�v���Ă��܂��Ă����ς�����܂���ˁB(^�B^)
�@
���炭�ߐ�ւ��^�C�~���O��ύX���Ă݂��肵�ėl�q���f���Ă݂܂��B
���P�P���X����
����Ɉ��������ߐ�ւ��^�C�~���O�̌����B
�g���N�����Ă�����ۂɃg���N����������܂ł̎��Ԃ��킩��Ȃ��̂ŁA�����ɐF�X����Ă݂�B
�T�[�{�̒x����l�����Ă����S�ɐڒn�����ł��낤�^�C�~���O�Ńg���N��ON�ɂ��Ă݂�B�@����Ǝ���1���A�܂�߂�K�p���Ă����V�r���x���r�ɂȂ��Ă�����g���N���߂�Ȃ����Ԃ�����炵���A�܂Ƃ��ɕ����Ȃ��B�@����ς�g���N���߂�܂łɂ�50ms�ȏ�͂�����݂����ł���B
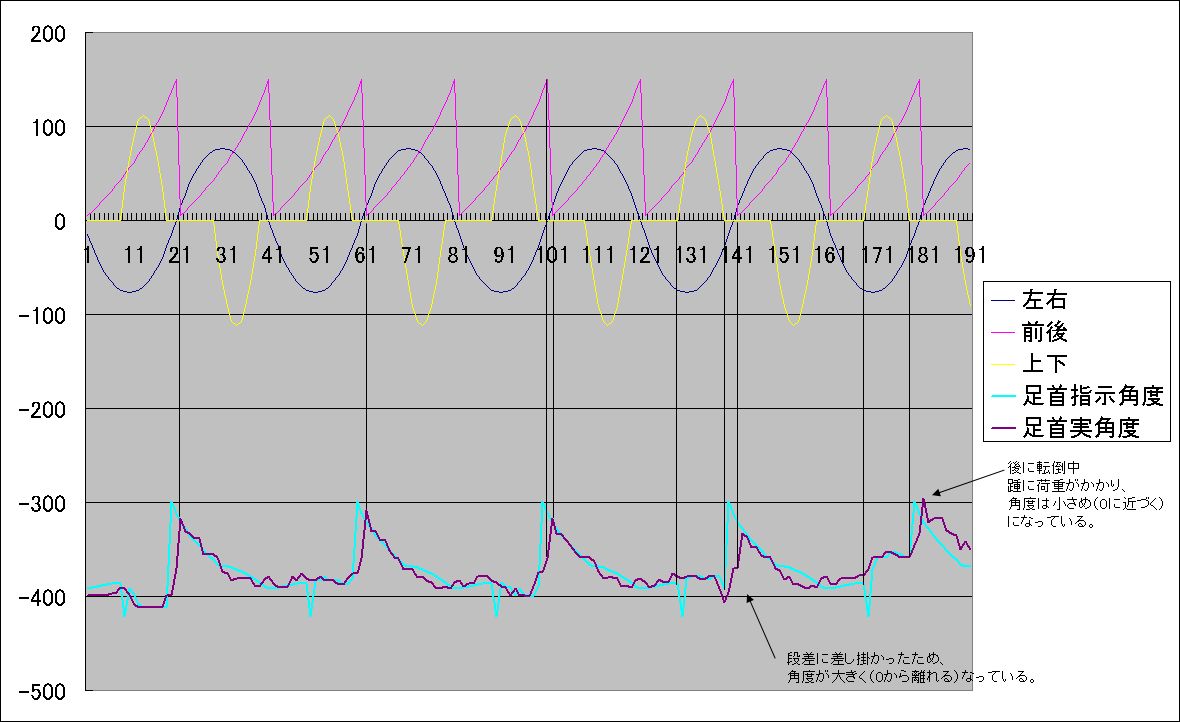
����̃O���t�Ŏw���p�x�Ǝ��p�x����v����^�C�~���O���g���N���߂�^�C�~���O�A�Ɠ����ɐڒn�����������^�C�~���O�Ƃ����O��Œi���ɍ����|����悤�ȏŃf�[�^���Ƃ��Ă݂�B
 �@�C���[�W�摜
�@�C���[�W�摜
�ł����Ȃ��Ă��܂����B�B�B
��Q���Ƃ���ŁA����O��߂����펞�p�x�Ɏ���Ȃ��l�q�����o�ł����B�@���̎���1���Ō��ɂ̂������Ă��܂����̂����ɑ̏d������Ă��܂��A�t�����ɋȂ����Ă��܂��Ă���B�@�E�E�E���̕ӂ�̊p�x���擾����ΘH�ʂ̌X�����擾�ł������A�A�A���Ȃ��`�B����܂莩�M�Ȃ����ǁB�B
���āA�H�ʂ̌X���̎擾�^�C�~���O����̌��܂����̂����A�܂��������Ȃ���Ȃ�Ȃ����Ƃ��B
����́A�A�A�����_�̕��s�v���O�����͎Ζʂ�����悤�ɂ͂ł��Ă��Ȃ��̂��B�B�B�@�܂��A�p�����[�^�̐ݒ肪�ł��Ȃ��킯����Ȃ����ǁA�u�ΖʂȂ����Ȃ�����v�Ǝv���āA�H�ʂ͕��ʌ���ŁA��̂߂������ɏu�ԓI�ɂܐ�ŗ����Ƃ��l���āA�ܐ旧�����p�����f���ɔ��f���Ă܂��B�@������A�u�]�|�r���̎p���̎擾�v�Ƃ������œڍ����Ă��邵�A�ܐ旧����������키�����������낤�Ǝv���Ă���̂ŁA�R�����@��Ɏp�����f���̉��������܂����B�@�ƁA�����Ă��ܐ旧�������f��������̂ɂ͋�J�������ǁA�Ζʂɗ����Ă���l�q�����f��������͔̂�r�I�ȒP�ł��B�@���łɃv���O�����̐�������肽�����B�B�B
�Ƃ������ƂŁA�܂��͕��s�v���O�����̏C���Ȃ�����Ă���܂����B�@������ƃo�O�������ǂ��������āA�V���s�p���ŕ����o���܂����B�@�Ζʂŕ����邩�ǂ����̃e�X�g�B
 �@���`�B
�@���`�B
 �@����`�B
�@����`�B
�������X���b�v�Ȃ̂ŁA�X���X�������s�����ǁA�܂�������炵���B�@
�X���b�v���ɂ������łɁA�o�g���n���{�b�g���V���J�V���J�����Ă邠����ă����_�ł��ł���̂��ȁH�Ǝv���ĕ������Ă݂܂����B�@1���̑J�ڎ��Ԃ�0.15�b����0.2�b���炢�ŁA������50mm���炢�ɂ���ƃV���J�V���J�V���J�`���ƍs���܂��B�@��������]�Ԃ̂Ŏ��p�ɂ���ɂ͔��������v��܂����B�@���x�̂�ف[�����̓����_�ŏo�ꂵ�悤�Ǝv���Ă�����ǁA�_�b�V��2000�������ł��Ă̂��ڕW�ł��B�@�J���������Ȃ���V���J�V���J�`���Ă͖̂������ȁB(^_^;)
�Ζʂ̕��s���ł���悤�ɂȂ����̂ŁA�Ƃ��Ƃ����͐ڒn�ʂ̌X�̎�荞�ݎ����ł��B�@�@�@�@�@�E�E�E�E���낻�������V�y�[�W�ɂ��Ȃ��Ƃ�����ł��ˁB�B
���P�P���P�O����
�c�Ƃ��ċA�����̂Ń��{�b�g�̃v���O�����͏��x�~�B�@�����̐���Ȃ�����Ă���܂����B

�s���n������ɂ̓t���b�g�ȑ����ł͂܂����낤�B�y���܂����K�v�ł��B�@�����āA���܂ł̌����f���āA�����̊O���͎x���r�ɂȂ��āA�I�[�o�[�V���[�g�C���ɂȂ����ꍇ�ɃX���b�v�œ����đς���\�����c���ăX���b�v�ɁB�@�����̓����͏R�葫�ɂȂ�̂ŃO���b�v�ɁB�@�����C���Ȃ̂ł����ԁ[��ƓK���ȍ��ɂȂ��Ă܂��B�@�e�L�g�[�������Ŏ������s���ƈӖ����Ȃ���ł����ǂˁB(^^�U
�~�������ƑO��ɂ̓X���b�v�ɂł�����܂����ɂ����Ȃ�̂ł����������̂����A�ٕ������C�W���̍ޗ����ĂȂ��ł��傤���B
�O���b�v�����ɂ̓G���X�g�}���g���Ă݂܂����B�@�G���X�g�}�͍��̂Ƃ���ł��O���b�v�͂�����f�ށB�@�����A���ʃe�[�v�œ\����Ȃ��̂����B�@����́u�����͐ڒ��܁v���Ă̂ł��Ă݂܂����B�@�����������猋�\�ȒP�ɔ����ꂽ�B�B�@�܂��S�R�t���Ȃ����ʃe�[�v���͂܂��Ȃ̂őϋv���͕ʂɂ��Ďg���Ă݂邱�ƂɁB
����͊��������āA�������s�e�X�g�ł��B
�����B���������A����̕ǐV���A�v�X��ONO-ONE�ł����B�@���ꂵ�[�B
���P�P���P�P����
�����͎d���ł�����҂���肪�t����c���I����āA�����͂����������ŋA�肽���Ȃ��`�Ƃ����C�����������A�����͈��݉�̗\��Ȃ̂ʼn䖝���Ă܂������A���Ă����B
�������������ł̕��s�e�X�g�B�@�����ǂ������s�ł��B�J�[�y�b�g���ƐH������ŃO���b�v����̂ł܂�������̂�����ǁA��̂߂��Ă������������B�@�t���b�g�����Ƃ��܂ЂƂO���b�v���Ȃ��Ń��[�����Ă��܂��B�@�܁A�����͕������ǂ˂��`�B�@�O���b�v������G���X�g�}�͑��̒����ɓ\��ׂ��Ȃ̂�������Ȃ��B�@���x�����Ă݂悤�B
���Ȃ����������f�W�J���œ���B�e���āAMOV�t�@�C����WMV�ɕϊ����܂����B�@����܂肫�ꂢ����Ȃ��ȁ[�B
���{�b�g�E�H�b�`�ɂ�ف[�E�Ղ��̋L�����ڂ�܂����B�@�V�O�}�������ς��ʂ��Ă�B�@���ꂵ���ł��ˁ[�B�@�_�b�V��2000�Ȃ�āA�d��Ȃ�������2������f�ڂ���Ă�B�@�Î~��̕��̃V�O�}���q���Ɉ͂܂�Ă���G�͂����ł��ˁ[�B���������q�������Ⴊ��ł�p���킢��(^�B^)�B�@�̐S�̃V�O�}���ʂ��ĂȂ��Ƃ��낪�L���ł��B
�˂���䂳��Ƃ��ɂ���ف[�E�Ղ����V���ɍڂ����L�����o�Ă܂������ǁA�G���h���X���ƂڂƂ̃c�[�V���b�g�B�@������q�����������o���Ă�B�@�V�O�}�͔M����b�ɂ��o�邩������Ȃ����A�I�o�����ȁB�@�^�R�Ȃ̂ɁB
�����_�������f�r���[���������ł��ˁB�@�悽�悽������f�r���[���Ă����グ���Ȃ������B�@(^�B^)
�{�Ƃ�ف[�ɏo�ꂵ�āA�����Ń_�b�V���Q�O�O�O�ɏo����Ă̂ʂ̖ڕW�ɐݒ肵�܂��傤�B�@����邼�[�B�@�@�@�@�E�E�E�l����ƁA�A�C�{�ł���Ă����Ƃ���i�����ĂȂ��ȁB�@����ڂ�B�B
����͔M����b�̕������B�@�P�P���܂Ńh���}���ĂāA�P�Q������M����b���Ă��̂Ń��{�b�g�J���͏o����(^_^;)
�T���y�j���͕����̌�����I���Ȃ̂ō�Ƃł��Ȃ����A�i���͂��������Ȃ��ł��ˁ[�B
���������ΐΐ삳���������Ă�u�{�W�����[��������Łu�ۏ��Ђ낵�v�ʼn���v�̓��͔M����b���ڂł��ˁB�@����͂����Ƃ��āA��ЋA��ɏH�t���s���Ĉ��ނ��Ă̂͂ǂ�Ȃ�Ȃ낤�B�@�s���������ǂȁ[�A�莞�ʼn�Џo���Ηǂ��̂����B�B
���āA���C�ɂ���Ȃ����I���ł̃X�s�[�`�̌��e�ł��l���悤���ȁB�@�E�E�E�E���Ȃ�ˁ[�A�X�s�[�`�B�B(>_<)
�J����������Ȃ��Ă����̂ڂ₫���ȁA�����B
 �@����
�@���� �@����
�@���� ����
����